

Минобрнауки россии
федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
«Самарский государственный технический университет»
(ФГБОУ ВПО «СамГТУ»)
А.Н. ДИЛИГЕНСКАЯ
Методические указания к проведению лабораторных работ по курсу
ИДЕНТИФИКАЦИЯ И ДИАГНОСТИКА ОБЪЕКТОВ И СИСТЕМ УПРАВЛЕНИЯ
Самара
Самарский государственный технический университет
2013
Оглавление
Самара 1
Самарский государственный технический университет 1
Лабораторная работа №1 4
Идентификация объекта во временной области 4
Теоретические сведения 4
Задание 11
Контрольные вопросы 12
Идентификация объекта в частотной области 12
Теоретические сведения 12
Задание 18
Контрольные вопросы 18
Лабораторная работа № 2 18
Определение передаточной функции объекта по переходной характеристике 18
Теоретические сведения 18
Идентификация динамического объекта явным МНК 22
Идентификация динамического объекта рекуррентным МНК 23
Задание 24
Контрольные вопросы 24
Лабораторная работа №3 25
Параметрическая идентификация импульсной переходной функции объекта 25
Теоретические сведения 25
Задание 27
Контрольные вопросы 27
Лабораторная работа №4. 28
Построение модальных наблюдателей состояния полного порядка 28
Теоретические сведения. 28
Задание 32
Лабораторная работа №5 33
Оценивание состояний с помощью фильтра Калмана 33
Теоретические сведения 33
Задание 37
Лабораторная работа №6 37
Одновременное оценивание параметров и состояний линейной системы 37
Теоретические сведения 37
По информации о заданной системе (A, B, C) строится расширенный фильтр Калмана (A1, B1, C1) 37
Схема объекта и расширенно фильтра Калмана имеет вид 38
38
Результаты моделирования имеют вид 38
38
1 Лабораторная работа №7 39
Техническая диагностика следящей системы методом избыточной переменной 39
Теоретические сведения 39
Задание 42
Лабораторная работа №1
Идентификация линейного динамического объекта
Цель работы.
Изучить основные этапы идентификации объектов: определение структуры модели, выбор критерия идентификации, параметрическую идентификацию. По экспериментально полученной переходной характеристике получить математическую модель объекта во временной области - в виде передаточной функции и в частотной области – в виде частотных характеристик.
Идентификация объекта во временной области Теоретические сведения
При идентификации объектов автоматического управления типовой и наиболее распространенной является задача определения передаточной функции объекта по его экспериментально полученной переходной характеристике (реакции на единичное входное ступенчатое воздействие). В качестве входного ступенчатого воздействия динамических систем управления может рассматриваться управляющий сигнал на включение (выключение) двигателя, насоса, открытие (закрытие) входных клапанов, и т.д.
Рассмотрим общий подход к идентификации динамического объекта управления, полагая, что его характеристики линейны и стационарны в диапазоне изменения амплитуды входного сигнала и в окрестностях рабочего режима.
В общем случае идентификация объектов сводится к выполнению следующих этапов:
Структурная идентификация.На основе априорных сведений о физических, химических или иных явлениях, происходящих в процессе, знаний аналитических свойств моделей и инженерных навыков выбирается общая структура модели и класс уравнений, которыми предполагается описывать наблюдаемый процесс. На практике выбор структуры модели осуществляется на основе априорных сведений об объекте по виду переходной характеристики.
Выбор критерия идентификации,характеризующего адекватность объекта и настраиваемой модели. В дальнейшем задача идентификации становится задачей оптимизации выбранного критерия путем надлежащего выбора структуры модели и изменением значений ее параметров. В большинстве случаев критерий качества идентификации выбирается в виде суммы квадратов невязок между наблюдавшимся и аппроксимированным значением выходного сигнала, полученными в дискретные моменты времени регистрации сигналов.
Параметрическая идентификация- определение численных значений параметров (коэффициентов дифференциальных, разностных, интегральных уравнений или передаточных функций) по имеющимся экспериментальным данным. При этом решается задача минимизации выбранного функционала идентификации.
Верификация модели(проверка адекватности модели объекту). Степень адекватности модели и объекта обычно оценивают путем сравнения их выходных сигналов при подаче одинаковых входных воздействий на объект и его модель. Это сравнение предпочтительно производить на основе новой информации, отличной от данных, которые использовались в процессе идентификации объекта.
Структурная идентификация
По виду экспериментально полученной
кривой переходной характеристики на
основании известных инженерных
графических методов идентификации []
принимается решение о структуре объекта,
и соответственно, выбирается конкретная
аналитическая зависимость, аппроксимирующая
переходную кривую и содержащая неизвестные
параметры
![]() .
В случае типовых звеньев, которыми в
большинстве случаев и ограничивается
построение моделей типовых динамических
объектов, это является стандартной
процедурой и производится путем анализа
графического изображения переходной
кривой на основании следующих основных
соображений.
.
В случае типовых звеньев, которыми в
большинстве случаев и ограничивается
построение моделей типовых динамических
объектов, это является стандартной
процедурой и производится путем анализа
графического изображения переходной
кривой на основании следующих основных
соображений.
Присутствие в переходной кривой участка
запаздывания начала реакции объекта
на входное воздействие означает наличие
в структуре объекта звена транспортного
запаздывания, и значение времени
транспортного запаздывания
![]() определяется как интервал времени между
моментом изменения входного сигнала и
началом изменения выходной величины.
определяется как интервал времени между
моментом изменения входного сигнала и
началом изменения выходной величины.
Далее для объекта, обладающего транспортным
запаздыванием, передаточная функция
определяется как произведение двух
передаточных функций
![]() ,
соответствующей транспортному
запаздыванию и
,
соответствующей транспортному
запаздыванию и![]() ,
соответствующей переходной функции
,
соответствующей переходной функции![]() ,
у которой за начало отсчета принимается
время
,
у которой за начало отсчета принимается
время![]() .
.
По виду переходной характеристики
определяется структура модели объекта.
Отсутствие участка статического режима
работы означает, что данный объект может
быть описан безинерционным звеном с
передаточной функцией
![]() ,
а присутствие установившегося участка
переходного процесса говорит об
инерционной структуре объекта. По
количеству точек перегиба на переходной
характеристике определяется порядок
апериодического объекта. Наличие в
кривой переходного процесса
перерегулирований приводит к структуре
колебательного объекта с передаточной
функцией
,
а присутствие установившегося участка
переходного процесса говорит об
инерционной структуре объекта. По
количеству точек перегиба на переходной
характеристике определяется порядок
апериодического объекта. Наличие в
кривой переходного процесса
перерегулирований приводит к структуре
колебательного объекта с передаточной
функцией![]() где
где![]() .
.
Также на основе графических методов приближенно могут быть определены числовые значения неизвестных параметров, которые могут быть использованы в дальнейшем при проведении процедуры параметрической идентификации как начальные значения.
Статический коэффициент передачи объекта определяется соотношением изменения установившегося значения выходного сигнала к величине входного воздействия:
![]()
где
![]() -
установившееся значение выходной
величины при подаче на вход объекта
ступенчатого входного сигнала с уровнем
-
установившееся значение выходной
величины при подаче на вход объекта
ступенчатого входного сигнала с уровнем![]() ;
;![]() и
и![]() - установившееся значение входного и
выходного сигналов до начала проведения
эксперимента.
- установившееся значение входного и
выходного сигналов до начала проведения
эксперимента.
Для инерционного объекта первого порядка
![]() постоянная времени объекта
постоянная времени объекта![]() определяется как отрезок времени, за
которое переходная функция достигает
63% своей установившейся величины, т.к.
приt=Tзначение переходной функции
приблизительно равно
определяется как отрезок времени, за
которое переходная функция достигает
63% своей установившейся величины, т.к.
приt=Tзначение переходной функции
приблизительно равно
![]()
Для величины угла наклона касательной к переходной кривой в нулевой момент времени справедливо соотношение:
![]()
Отсюда следует, что постоянная времени может быть определена как момент времени, в который касательная к переходному процессу в начальной точке траектории пересечет установившееся значение выходной величины (рисунок 3.1).
|
|
|
Рисунок |
|
Графическое определение постоянной времени инерционного объекта первого порядка |

Выбор структуры модели означает и выбор
входящего в нее вектора параметров
модели![]() .
.
Для решения рассматриваемой задачи
перейдем от модели объекта в форме
передаточной функции () к переходной
характеристике
![]() ,
вычисляя обратное преобразование
Лапласа или с помощью таблиц преобразований
,
вычисляя обратное преобразование
Лапласа или с помощью таблиц преобразований
![]()
Соответственно, переходная функция
![]() рассматривается как функция, параметрически
зависящая от параметров
рассматривается как функция, параметрически
зависящая от параметров![]() и от времениt.
и от времениt.
Критерий идентификациив
большинстве практических случаев имеет
вид квадратичного функционала качества,
и при использовании массивов выборочных
значений, полученных в дискретные
моменты времени, представляет сумму
квадратов отклонений расчетных
(модельных) значений выходного сигнала![]() от экспериментальных значений
от экспериментальных значений![]() ,
полученных в те же моменты времени
,
полученных в те же моменты времени![]()
![]() .
.
На этапепараметрической идентификациив соответствии с выбранным критерием
качества определяются конкретные
значения входящих в выбранную структуру
модели коэффициентов переходной
характеристики, минимизирующих суммарное
квадратичное отклонение фактических
дискретных значений выходного воздействия
объекта![]() и расчётных
и расчётных![]() ,
полученных в те же моменты времени.
Процедура минимизации функционала
идентификации позволяет получить
численные значения вектора параметров
модели
,
полученных в те же моменты времени.
Процедура минимизации функционала
идентификации позволяет получить
численные значения вектора параметров
модели![]() .
.
Выполнение работы. Методический пример
Ретроспективная процедура параметрической идентификации
Проведение эксперимента.
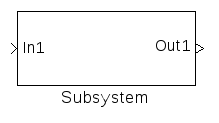
Эксперимент по получению переходной характеристики объекта имитируется в среде инструментальных средствSIMULINKпакетаMatLab. В качестве идентифицируемого объекта предоставляется оформленная в виде отдельного блока виртуальная подсистемаSubsystem, рассматриваемая как «черный ящик» со скрытой структурой и имеющимися входными и выходными портами для связи подсистемы с другими элементами при помощи сигналов. При этом все внутренние и внешние случайные возмущения, погрешности методов и средств измерений и неконтролируемые воздействия внешней среды характеризуются обобщенной помехой, которая полагается приведенной к выходу.
Для проведения эксперимента и получения экспериментальных данных в среде SIMULINKнужно реализовать следующую схему (пояснения по схеме приведены ниже):
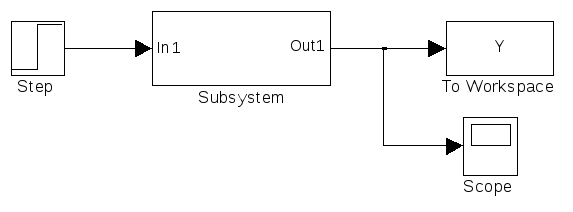
При данной постановке эксперимента исследователь может выбирать возможность подачи на объект желаемого входного воздействия – это режим активного эксперимента. Выберем в качестве тестового сигнала единичное ступенчатое воздействие, реализованное в SIMULINKгенератором ступенчатого сигнала – блокомStep. Чтобы ступенчатое воздействие произошло в начальный момент времени, параметрStep time(время наступления перепада сигнала) устанавливается равным 0с. Параметры начального и конечного значения сигналовInitial valueиFinal valueустанавливаются равными 0 и 1 соответственно.
Для визуального наблюдения изменения
сигнала в процессе моделирования нужно
использовать цифровой осциллограф
Scope, выполняющий
построение графиков исследуемых сигналов
как функций времени. При необходимости
общие параметры режима и параметры
сохранения сигналов в рабочей области
дополнительно задаются на вкладкахGeneralиData
historyсоответственно
с помощью инструмента![]() (Рarameters)
на панели инструментов.
(Рarameters)
на панели инструментов.
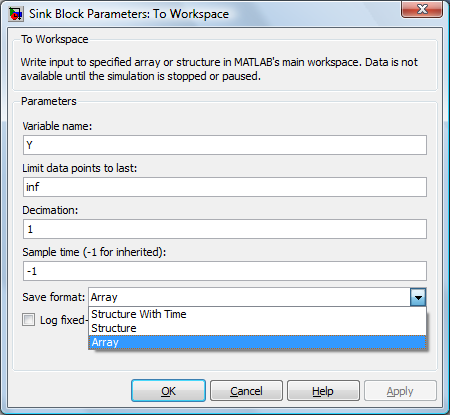
В ходе проведения эксперимента для последующей математической обработки необходимо сохранить выборку значений выходного сигнала объекта Yи значений моментов времени, в которые были получены эти данные. Для этого используется блок сохранения данных в рабочее пространствоТо Workspace. Для сохранения выборочных значений экспериментальных данных в виде одномерных массивов в блокеTo Workspaceнеобходимо установить формат вывода данныхSave format в виде массива -Array.
Для задания режима проведения эксперимента используется окно настройки Simulation→Configuration Parameters, вкладкаSolver, где можно задать необходимые параметры расчета: интервал моделирования путем задания моментов времени началаStart timeи окончанияStop timeпроведения эксперимента, способ моделированияType– с переменнымVariable-stepили постояннымFixed-step шагом, а также выбрать из возможных метод расчета нового состояния системыSolver (метод решения систем обыкновенных дифференциальных уравнений – так называемый «решатель ОДУ»).
Время окончания эксперимента нужно выбирать таким, чтобы в выбранный интервал идентификации переходный процесс достиг бы своего установившегося значения (для инерционных объектов). Обычно переменный шаг моделирования рекомендуется использовать для непрерывных систем, а фиксированный – для дискретных, в этом случае при необходимости можно изменять его значение. Для решения текущей задачи можно применять любой способ моделирования.
В результате проведения эксперимента в «рабочем пространстве» будут получены и сохранены массивы выборочных значений выходного сигнала Yи моментов времени, в которые эти значения регистрировались (по умолчанию –tout, будем использовать и далее это обозначение для массива значений моментов времени регистрации выходных (и входных) воздействий).
2. Структурная идентификация.
По виду кривой переходного процесса, наблюдаемой по осциллографу, принимается решение о структуре модели.

В данном случае переходная кривая не содержит участка транспортного запаздывания, изменяется во времени по экспоненциальному закону и имеет одну точку перегиба, в соответствии с чем идентифицируемый объект можно аппроксимировать апериодическим звеном первого порядка без запаздывания
![]() (1).
(1).
В общем случае, аналитическое выражение
переходной характеристики
![]() ,
соответствующей передаточной функции
,
соответствующей передаточной функции![]() ,
определяется на основе обратного
преобразования Лапласа или с помощью
таблиц преобразований. Для типового
звена (1) это выражение имеет вид:
,
определяется на основе обратного
преобразования Лапласа или с помощью
таблиц преобразований. Для типового
звена (1) это выражение имеет вид:
![]() (2)
(2)
В рамках выбранной структуры объекта
подлежащими определению параметрами
являются коэффициент передачи
![]() и постоянная времени
и постоянная времени![]() объекта, образующие вектор параметров
объекта, образующие вектор параметров![]()
С помощью графических методов для
инерционного объекта первого порядка
по виду переходной кривой определяются
начальные приближения для параметров
модели
![]()
![]() ,
,
![]()
Соответственно, вектор начальных
приближений искомых параметров будет
иметь вид
![]()
3. Функционал идентификации.
Переходную функцию
![]() будем рассматривать как функцию,
параметрически зависящую от коэффициентов
будем рассматривать как функцию,
параметрически зависящую от коэффициентов![]() и от времениt.
и от времениt.
Учитывая модельную запись переходной
характеристики (2)
![]() ,
запишем подлежащий минимизации функционал
суммарной квадратичной невязки
экспериментальных данных
,
запишем подлежащий минимизации функционал
суммарной квадратичной невязки
экспериментальных данных![]() и расчетных значений по (2) для тех же
моментов времени
и расчетных значений по (2) для тех же
моментов времени![]() :
:
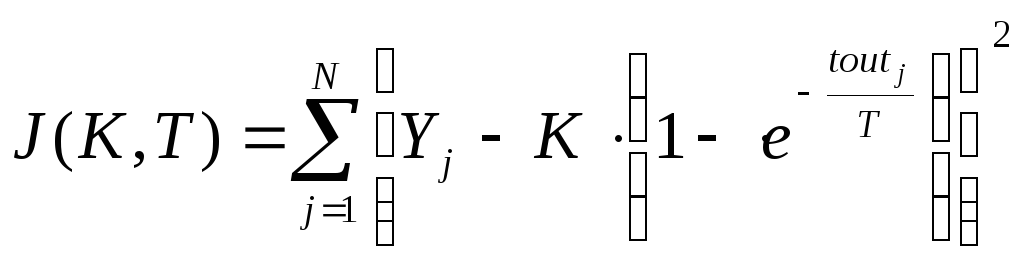 (3)
(3)
4. Параметрическая идентификация.
Для нахождения значений параметров
переходной характеристики минимизируется
полученный критерий качества (3),
параметрически зависящий от искомых
коэффициентов
Современные специализированные программные средства для выполнения инженерных и научных расчетов (MathCad,MatLabи подобные) позволяют решить задачу минимизации функционала, не задаваясь вопросом особенностей используемого метода решения, а требуя только запись функционала с учетом синтаксиса среды разработки выбранного программного средства.
Приведем процедуру минимизации функционала в пакете MatLabс помощью функцииfminsearch. Функцияfminsearch находит локальный минимум скалярной функции нескольких переменных, начиная с некоторой начальной точки. В общем случае, задача относится к нелинейной оптимизации без ограничений.
В качестве примера использования данной
функции можно предложить следующий
вариант. Сначала нужно описать подлежащую
минимизации функцию f0, входным
аргументом которой является вектор
параметровq, (в общем
случае может быть скаляром, вектором
или матрицей), и возвращающую скалярное
значение. Искомые параметры должны быть
объединены в вектор с единым названием
и пронумерованы. В рассматриваемом
случае векторqсодержит
два значения:![]() .
Функцияf0 описывается следующим
образом:
.
Функцияf0 описывается следующим
образом:
f0=@(q)fun, (5)
где fun– математическая запись минимизируемой функции .
Запись @(q) задает зависимость функции от вектора параметровq, гдеq(1) – коэффициент передачи;q(2) – постоянная времени.
В случае минимизации функционала (3), с учетом синтаксиса языка программирования MatLab, выражение (5) примет вид
f0=@(q)sum(Y-q(1)*(1-exp(-tout/q(2)))).^2(6)
Выражение
[q,fval] =fminsearch(f0,q0) (7)
задает поиск локального минимума описанной в fun функции в зависимости от вектора параметров q вблизи точки q0 и возвращает найденное оптимальное значение вектора q и полученное значение целевой функции fval, как решение отq.
Первое уравнение задает вычисление функционала идентификации F0, равного суммарному квадратичному отклонению.
Второе соотношение определяет процедуру поиска параметров x(1) иx(2), при которых F0 принимает минимальное значение.
[10,10] – начальные значения для расчета для каждого из параметров. Процедура расчета очень сильно зависит от заданных начальных приближений, определить которые можно, используя графические методы идентификации.
Примечание:
Следует иметь ввиду, что функция fminsearch находит только локальный минимум, и следовательно, результаты вычислений существенно зависят от вектора начальных приближений. При необходимости можно варьировать начальные значения параметров, контролируя полученный результат по вычисленному значению функционала. Кроме того, в общем случае эффективность процедуры оптимизации функции fminsearch резко снижается с увеличением размерности вектора искомых параметров.
Таким образом, минимизация рассматриваемого функционала идентификации () проводится по следующим соотношениям:
f0=@(q)sum(Y-q(1)*(1-exp(-tout/q(2)))).^2
[q, fval] =fminsearch(f0, [12, 7.6])
Результатом выполнения будут значения вектора параметров
q = 12.7630 7.5043
и целевой функции
fval = 5.6879e-018
В результате параметрической идентификации
определена следующая передаточная
функция модели заданного объекта
![]() .
.
В итоге Matlabподберет коэффициенты в знаменателе передаточной функции модели. Это будет просматриваться в моделиSimulink, и получится следующий график верификации.
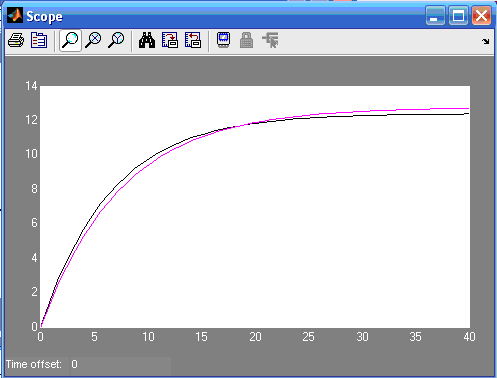
Рисунок – График верификации модели
Из графика видно, что обе кривые примерно совпадают, это означает, что подтверждается построенная модель.
Точность расчетов существенно зависит от выбранного интервала дискретизации. Если точность не удовлетворяет, то можно выбрать другой интервал и сделать все заново.