

Задание
1. Построить фильтр Калмана.
2. Сделать выводы о проделанной работе.
Лабораторная работа №6 Одновременное оценивание параметров и состояний линейной системы
Цель работы:
Научиться синтезировать фильтр Калмана для оценивания состояний системы и неизвестных параметров.
Теоретические сведения
Методы фильтрации, разработанные для линейных систем, могут быть применены и для нелинейных систем.
Рассматрим задачу оценки состояний, когда известна лишь структура матрицы объекта, то есть известны функции, которые содержат матрицы, и не известны значения параметров, которые содержат сами функции. Прямой подход к решению такой задачи предполагает расширение вектора состояний за счет неизвестных параметров.
Необходимо оценить состояние х и среднее значение помехип по доступным наблюдениям сигналову1 иу2 при этома неизвестен. Прямой подход к задаче предполагает расширение вектора состояний за счет неизвестных параметров. Вектор параметрова ( в предположении, что он постоянен) интерпретируется как функция времени, задаваемая уравнениема’=0.
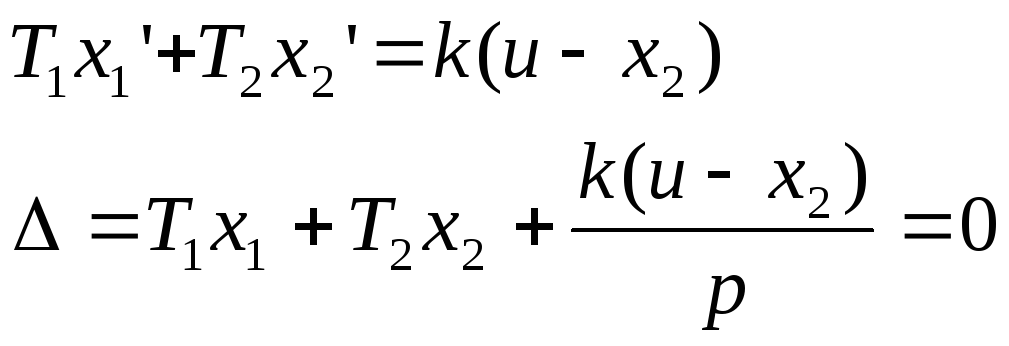
Отсюда следует система уравнений:
![]()
Даже для линейного объекта задача совместного оценивания параметров и состояний нелинейна относительно вектора параметров и состояний. Соответственно, подход к решению этой задачи должен быть на основе настраиваемой модели, т.е. иметь итеративный характер.
Методический пример
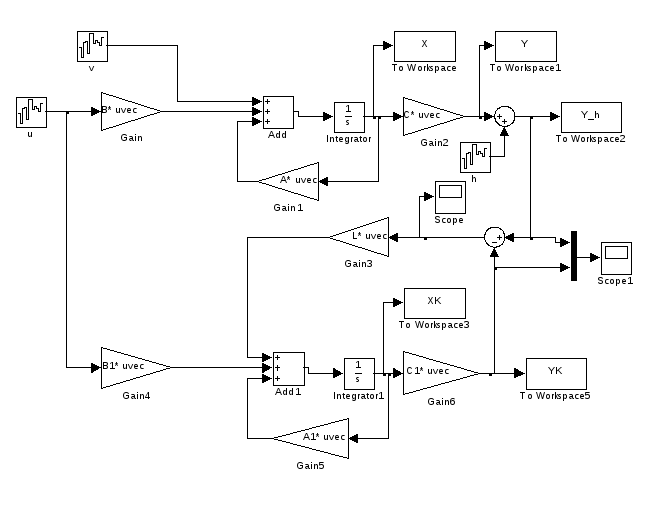
По информации о заданной системе (a, b, c) строится расширенный фильтр Калмана (a1, b1, c1)
koef=100;
t1=1;
t2=0.4;
t3=0.08;
t4=0.33;
A=[0 1 0 ;0 0 1;-1/(t2*t3*t4) -(t2+t3+t4)/(t2*t3*t4) -(t2*t3+t2*t4+t3*t4)/(t2*t3*t4)];
B=[0; 0; 1];
C=[koef/(t2*t3*t4) koef*t1/(t2*t3*t4) 0];
A1=[0 1 0;0 0 1;-1/(t2*t3*t4) -(t2+t3+t4)/(t2*t3*t4) -(t2*t3+t2*t4+t3*t4)/(t2*t3*t4)];
B1=[0; 0; 1];
C1=[0 koef/(t2*t3*t4) 0];
Схема объекта и расширенно фильтра Калмана имеет вид
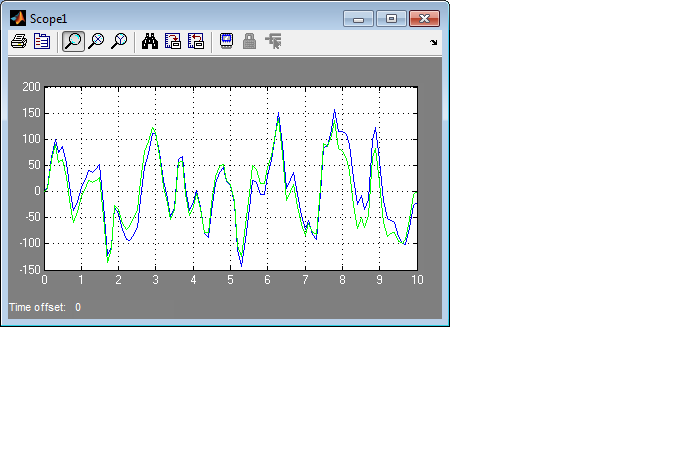
Результаты моделирования имеют вид
Лабораторная работа №7
Техническая диагностика следящей системы методом избыточной переменной
Цель работы:
Научится использовать метод избыточной переменной для задач идентификации.
Теоретические сведения
Дана некоторая система контроля по методу избыточных переменных (МИП) для случая одной избыточной переменной.
Предполагается, что проверяемая система автоматического управления САУ снабжена датчиками для измерения входных х и выходных у сигналов. К последним относят как внешние выходные сигналы всей САУ, так и выходные сигналы ее отдельных блоков, измеряемые в целях контроля.
Устройство контроля УК, на которые поступают входные и выходные сигналы проверяемой системы управления, формирует избыточную переменную z, равную сумме или другой линейной комбинации выходных сигналов системы. Контроль производится сравнением значений избыточной переменной с реально измеряемой суммой входных сигналов.
![]()
где
![]() - это постоянные коэффициенты.
- это постоянные коэффициенты.
Контрольный сигнал используется в дальнейшем для непрерывной проверки правильности функционирования САУ. Главное свойство сформированной таким образом избыточной переменной – результат ее суммирования с выходными сигналами проверяемых блоков должен быть равен нулю независимо от вида входных сигналов.
При использовании МИП можно не только контролировать правильность работы объекта, но и осуществлять техническую диагностику, это означает, что анализ сигнала позволяет указать место возникновения неисправности. Кроме того, задача состоит в том, чтобы выяснить, в каком именно звене произошла ошибка. Информацию о месте неисправности можно получить, сравнивая сигнал с входными и выходными сигналами звеньев.
Рассмотрим следящую систему:
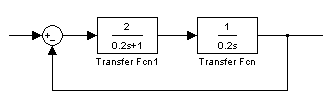
Рисунок – Структура системы
Дана система в своей структуре имеет интегрирующее и апериодическое звено.

Формируем сигнал
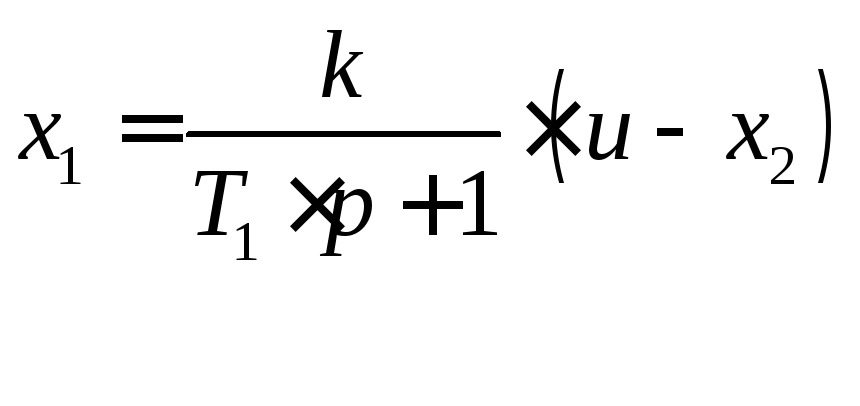
![]() на основанииu, x1, x2(считая, что они
доступны для измерения). Перейдем к
дифференциальному уравнению.
на основанииu, x1, x2(считая, что они
доступны для измерения). Перейдем к
дифференциальному уравнению.
![]()
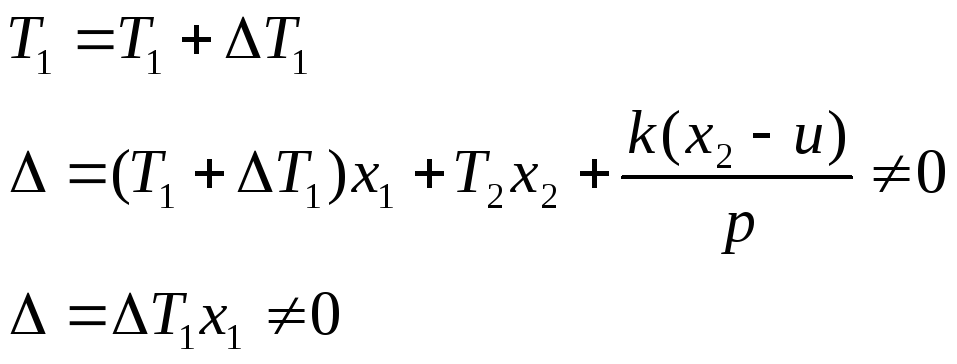
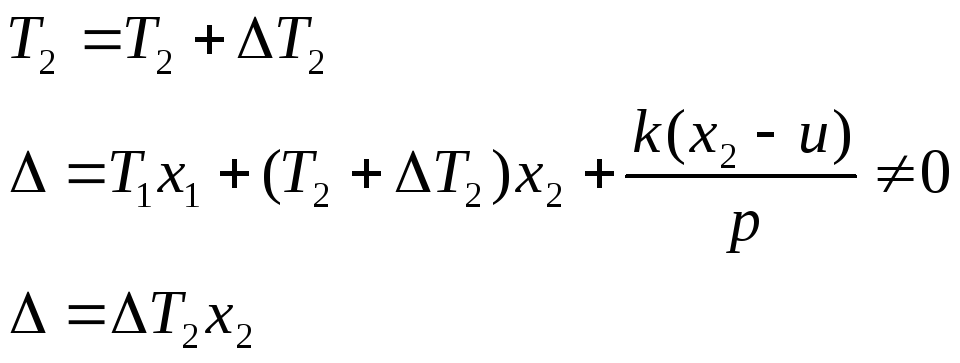
Нужно сформировать контрольный сигнал
по уравнению
![]() ,
этот сигнал будет равен нулю при
отсутствии дефектов входного сигнала.
Если ввести другие значенияК, Т1илиТ2, то
,
этот сигнал будет равен нулю при
отсутствии дефектов входного сигнала.
Если ввести другие значенияК, Т1илиТ2, то![]() изменится. При этом можно выявить место
возникновения сбоя.
изменится. При этом можно выявить место
возникновения сбоя.
Методический пример
Соберем в Simulinkследующую схему.
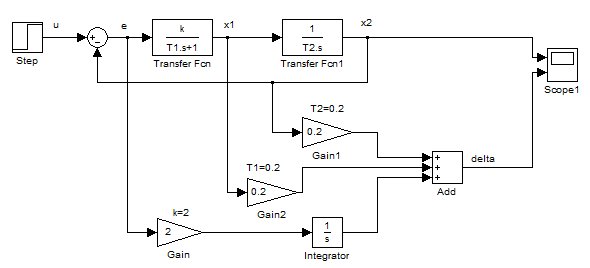
Рисунок 41 – Схема
Пусть k=2,T1=0.2,T2=0.2.
Нужно сформировать
![]() и
и![]() ,
а затем на основе
,
а затем на основе![]() проверить правильность системы.
Предполагается, что
проверить правильность системы.
Предполагается, что![]() ,
,![]() могут
отходить от своих начальных
значений.
могут
отходить от своих начальных
значений.
Алгоритм:
 ;
;![]()
Подставим
![]() в
в![]() .
Получаем комбинацию.
.
Получаем комбинацию.

Смоделируем систему и получим искомое
![]() (рис.42). ПараметрыТ1, Т2иkзададим в рабочем окнеMatlab.
(рис.42). ПараметрыТ1, Т2иkзададим в рабочем окнеMatlab.
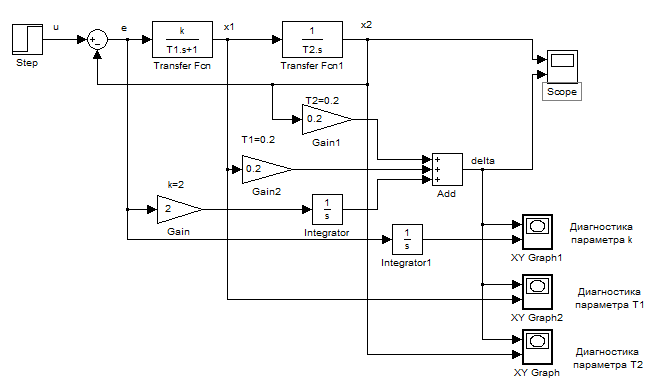
Рисунок 42 – Схема
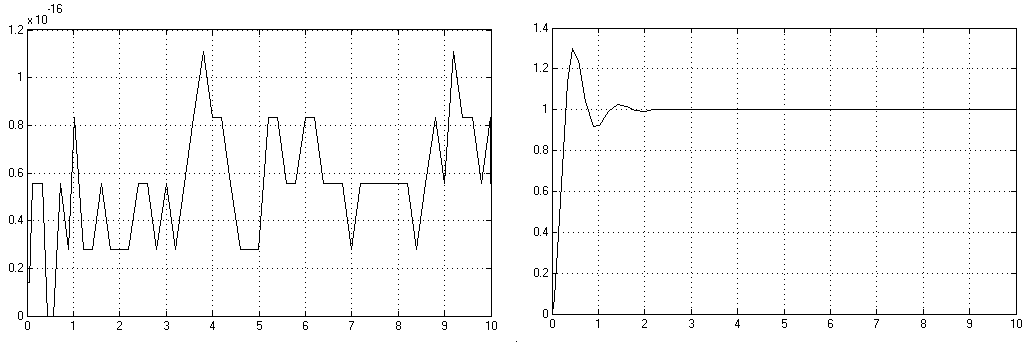
Рисунок 43 – График изменения
 и переходный процесс системы
и переходный процесс системы
Для того чтобы проводить диагностику какого-либо параметра, необходимо отслеживать их изменение на всем промежутке моделирования.
1) Предположим, например, изменилось
![]() .
.
Смоделируем данное отклонение, изменив
параметр Т1. При изменении![]() получились следующие графики (рис. 44).
получились следующие графики (рис. 44).

Рисунок 44 - Графики из блоков XYGraph
Как видно на рисунке, график блока XYGraphлинейного вида (отображает линейную зависимость). Следовательно, параметрТ1изменился.
2) Теперь промоделируем аналогично изменение Т2. ПричемТ1необходимо вернуть в первоначальное значение.
Получился график на рисунке 45.
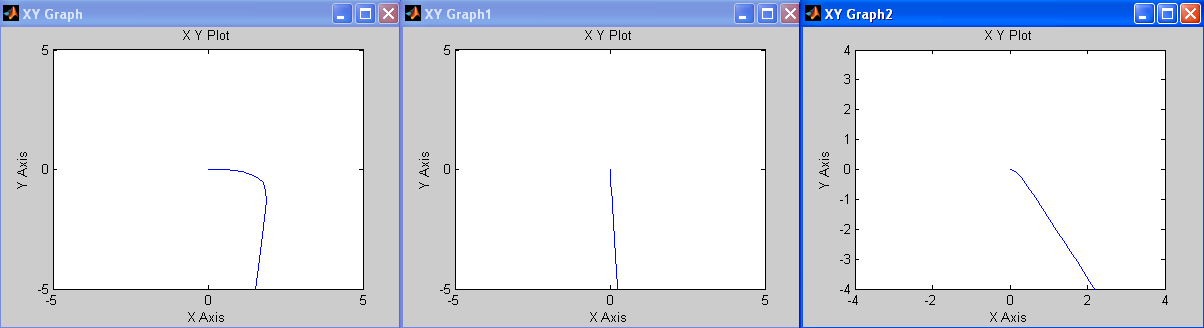
Рисунок 45 – Графики из блоков XYGraph
Как видно на рисунке, график блока XYGraph1 линейного вида. Следовательно, параметрТ2изменился.
3) Промоделируем изменение параметра k, вернув в первоначальное значениеТ1иТ2и изменивk.

Отсюда можно сделать вывод о том, что при изменении параметра kв блокеXYGraphдолжна наблюдаться линейная зависимость.
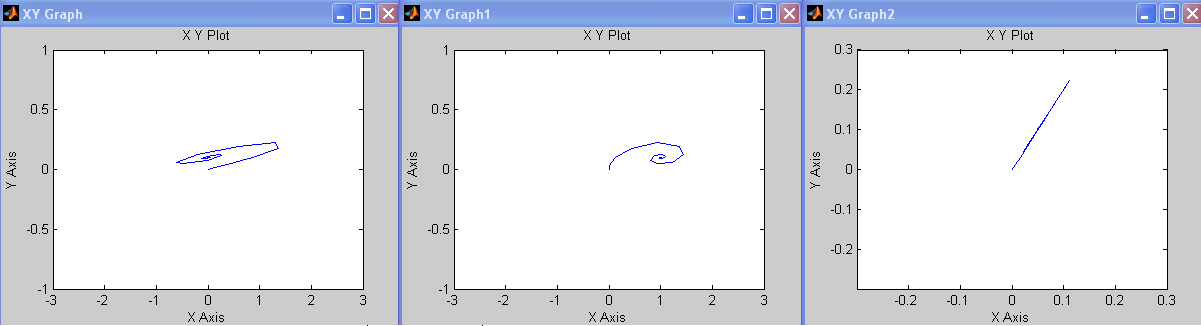
Рисунок 46 - Графики из блоков XYGraph
Как видно из рисунка, только график из блока XYGraph2 имеет линейный вид. Следовательно, можно сделать вывод об изменении параметраk.