

Самостоятельная работа 1
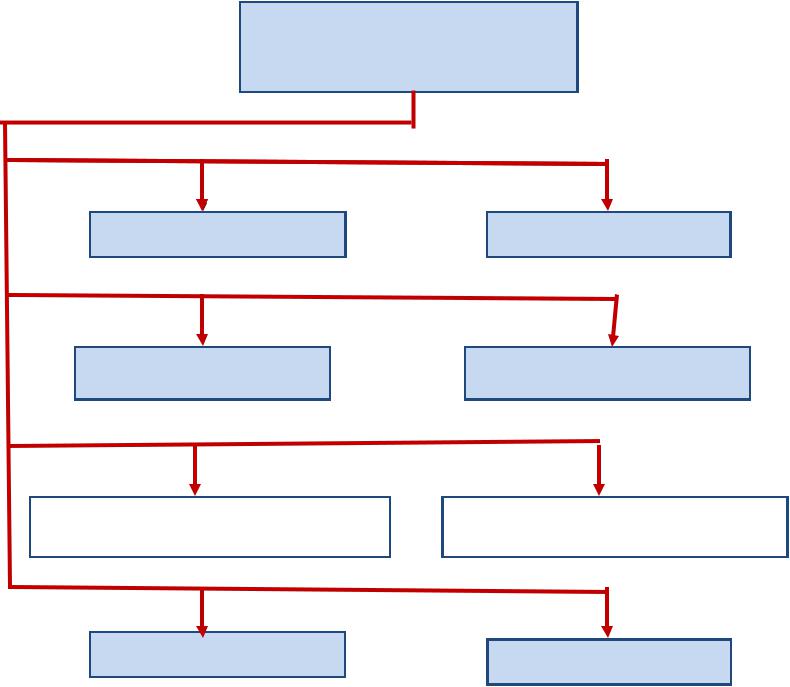
.pdfКЛАССИФИКАЦИЯ САУ
Системы
автоматического
управления
Разомкнутые |
|
Замкнутые |
|
|
|
|
|
|
Принцип |
|
Принцип |
|
Принцип |
|
Принцип |
программного |
|
компенсации |
|
обратной |
|
комбинированного |
управления |
|
(по возмущению) |
|
|
||
|
|
связи |
|
управления |
||
|
|
|
|
|
||
|
|
|
|
|
|
|
( )
Стабилизирующие |
|
Программные |
|
Следящие |
|
Оптимальные |
|
Адаптивные |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Системы
автоматического
управления
Линейные Нелинейные
Стационарные Нестационарные
Системы с сосредоточенными |
|
Системы с распределенными |
параметрами (ССП) |
|
параметрами (СРП) |
|
|
|
Астатические |
Статические |
|
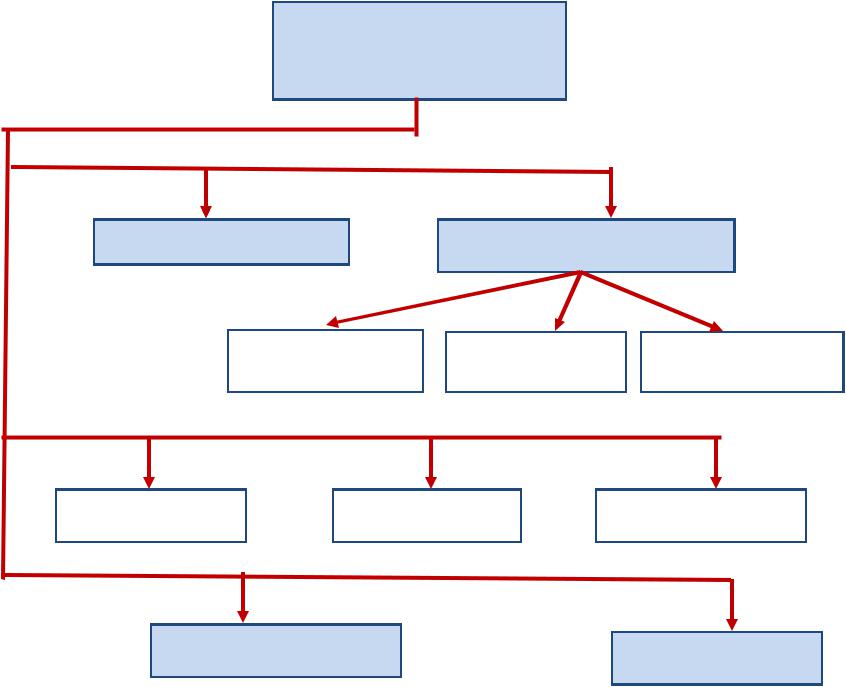
Системы
автоматического
управления
Непрерывные Дискретные
РЕЛЕЙНЫЕ |
|
ИМПУЛЬСНЫЕ |
|
ЦИФРОВЫЕ |
|
|
|
|
|
ОДНОМЕРНЫЕ |
|
МНОГОМЕРНЫЕ |
|
БЕСКОНЕЧНОМЕРНЫЕ |
|
|
|
|
|
( )
ДЕТЕРМИНИРОВАННЫЕ |
СТОХАСТИЧЕСКИЕ |
|

Основные принципы управления.
.Принцип автоматического управления определяет, как и на основе какой информации в системе формируется управляющее воздействие. Выбор принципа управления зависит от назначения САУ, характера изменения задающего и возмущающих воздействий, стабильности параметров ОУ и др.
.
,
.
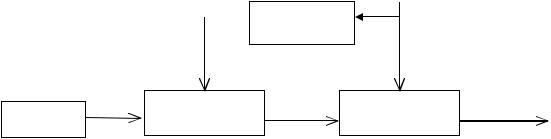
Принцип программного управления:
,
, ,
.
|
Z(t) |
|
0(t) |
|
|
U(t) |
(t) |
|
ЗУ |
АУУ |
ОУ |
- ; |
– ; |
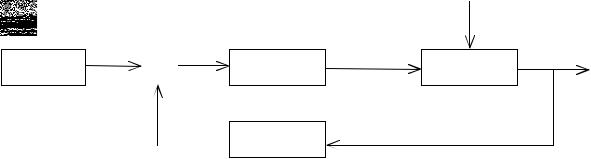
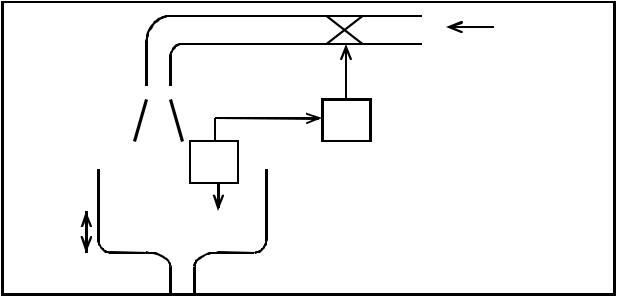
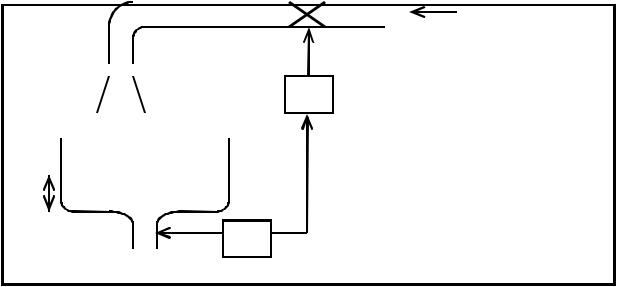
Принцип обратной связи (управления по отклонению):
! .
- " ,
! # !
|
|
|
|
|
|
. |
|
|
|
|
: |
||||||
|
|
|
|
ε(t ) |
Z(t) |
|
|
|
|
0(t) |
|
|
U(t) |
(t) |
|
||
|
|
|
|
|
- ; |
|||
|
|
|
|
|
||||
|
|
|
|
|
|
|||
ЗУ |
|
|
|
|
АУУ |
ОУ |
|
|
|
|
|
|
|
|
|
! |
– |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
; |
|
|
|
|
|
|
УОС |
|
"# – "# |
|
|
|
|
|
|
|
|||
ε(t ) = x0 (t ) − x (t ) - "$%&'!$()*+", "-%!$+", #./ &
ε(t ) = x0 (t ) + x (t ) - 0")"1&$()*+", "-%!$+", #./ &
! "
#!
$
!
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вода |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
H – уровень воды |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q |
|
|
|
|
|
|
|
|
|
|
|
Р |
||||||
|
|
|
|
|
|
|
|
в баке |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ду – датчик |
|
|
|
|
|
|
|
|
|
|
Ду |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
уровня |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р – регулятор |
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Q – расход воды |
|||||||
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в бак |
# - ?
- ?
- ?
% - ?
& - ?
' - ?
': ,
.
&: #
( ) ,
.
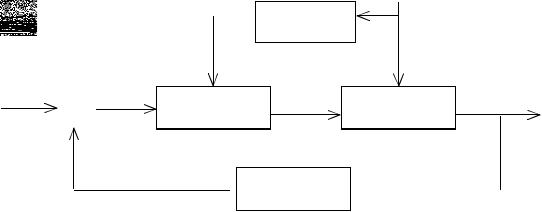
Принцип компенсации (управления по возмущению):
,
( .
, ,
) * +,'-.+
:
|
|
|
ИУ |
Z(t) |
|
" |
– |
|
|
|
|
||||
|
|
|
|
|
|||
|
0(t) |
|
|
|
|
- ; |
|
|
U(t) |
|
(t) |
! |
– |
||
|
АУУ |
ОУ |
; |
||||
ЗУ |
|
|
|||||
|
|
|
|
|
& |
– |
|
|
|
|
|
|
|
||
% !
,
! .
$ !
,
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
# - ? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- ? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
% - ? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
& - ? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Др |
|
|
|
|
' - ? |
& : # ,
.
': # , ,
,
.
2 , #!
.
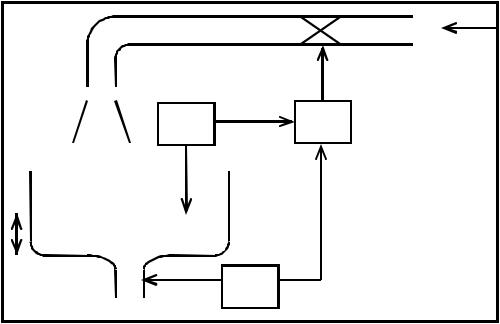
Принцип комбинированного управления:
.
! :
|
|
|
|
ИУ |
|
|
|
- ; |
||
|
|
|
|
|
|
|||||
|
ε(t ) |
|
Z(t) |
|
|
|||||
0(t) |
U(t) |
(t) |
! |
– |
||||||
|
|
|
||||||||
|
АУУ |
; |
||||||||
|
|
ОУ |
|
|
||||||
|
|
|
|
|
|
|
|
"# – "#; |
||
|
|
|
|
|
|
|
|
& |
– |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
УОС |
|
|
|
. |
||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
!
, -
.
$ !
, !
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вода |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
H – уровень воды в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
баке; |
|
|
|
|
|
|
|
|
|
|
|
Ду |
|
|
|
|
|
Р |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Др – датчик расхода |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
воды из бака; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р – регулятор; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q 1 – расход воды |
Н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в бак; |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q 2 – расход воды из |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Др |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
бака. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- ?
- ?
- ?
% - ?
-?
&
' - ?
Q
& :
.
': , ,
,
.