

Так как в точке Р скорости VPC и VC направлены по одной прямой проти-
воположные стороны и VР = 0 , то VPC = VC, откуда получаем, что ω = VC./R,
следовательно, VAC = ω R = VC.
Скорость точки А является диагональю квадрата, построенного на взаимно перпендикулярных векторах VA и VAC , модули которых равны, следова-
тельно VA =VC  2.
2.
Аналогично определяется скорость точки D. Скорость точки B равна
VB =VC +VBC , при этом скорости VC и VBC равны по модулю и направлены по одной прямой, поэтому VB = 2VC .
План скоростей
План скоростей представляет собой графический метод определения скоростей точек плоской фигуры.
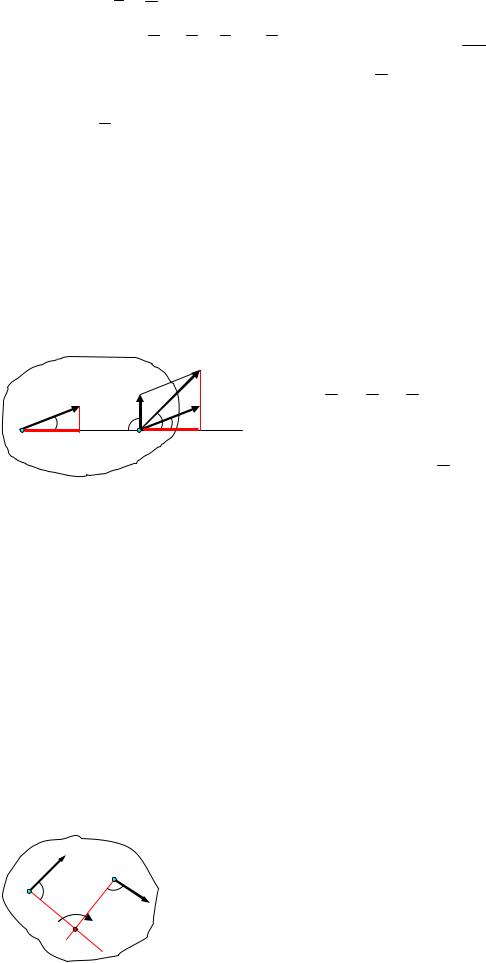
Пусть известны вектор скорости точки А и направление скорости точки В плоской фигуры (рис.8). Определим вектор скорости точки В.
Скорость точки В определяется формулой
VB =VA +VBA .
В этой формуле известны направление и модуль скорости точки А и на-
правления векторов VB и VBA ( VBA AB ).
Выбираем (рис. 8а) неподвижный центр О, откладываем от него в произвольно выбранном масштабе вектор Oa =VA , получаем точку а. Затем из центра О поводим прямую, параллельную скорости VB , а из точки а проводим прямую, параллельную скорости VBA , (перпендикулярно отрезку АВ). Точка пересечения этих прямых определяет точку в. Соединяем центр О с точкой в, получаем вектор Ob =VB , в полученном треугольнике Оав вектор ab =VBA .
VA |
а |
а |
С |
|
|
А |
|
|
AB |
|
|
|
В |
О |
|
|
AC
с О
|
в |
в |
BC |
Рис.8 |
Рис.8а |
|
Рис.8 б |
6

Определим на плане скоростей модуль и направление скорости еще одной точки С. На основании формул
VC =VA +VCA , VC =VB +VCB
Можно записать
VA +VCA =VB +VCB .
Проведем из точки а прямую (рис.8 б), перпендикулярно отрезку АС (так как VCA AC ). Конец вектора VCA должен лежать на этой прямой. Из
точки b проведем прямую перпендикулярно отрезку ВС (VCB BC ). Конец вектора VCB лежит на этой прямой. Следовательно, точка пересечения прямых, проведенных из точек а и b, определит точку с. Соединяя центр О с точкой с прямой, получим вектор Oc =VC
Фигура Оаbс представляет собой графическую картину распределения скоростей плоской фигуры и называется планом скоростей. Точки а.b, с называются вершинами плана скоростей, векторы Oa, Ob ,Oc представляют
скорости точек А, В, С. Векторы ab , bc, ac равны скоростям точек В, при вращении вокруг соответствующих полюсов. Как следует из построения тре-
угольники АВС и авс подобны и повернуты друг относительно друга на угол
900.
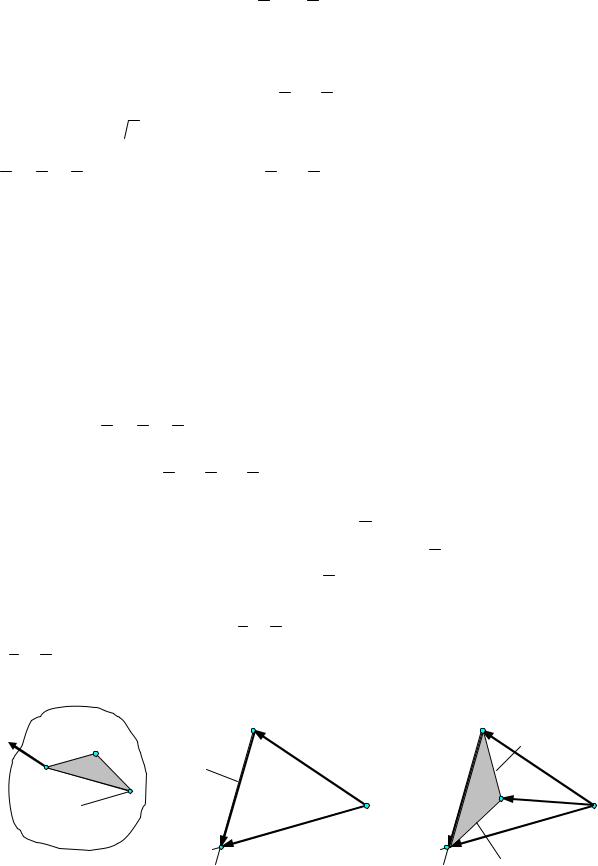
Пример. Определить скорости точек В и С шатуна кривошипношатунного механизма (рис.9) путем построения плана скоростей, если известно, что угловая скорость кривошипа ОА равна ω и АС = СВ.
Решение. Скорость точки А перпендикулярна кривошипу и равна
VA = ω OA.
Скорость VB точки В направлена горизонтально влево.
VB =VA +VBA , VBA AB .
Выберем полюс О и отложим из него в выбранном масштабе вектор Oa =VA . Из этого же полюса проведем прямую, параллельную вектору VB . Затем из конца вектора Oa поведем прямую, перпендикулярную шатуну АВ. Точка пересечения этой прямой и прямой, параллельной VB , определяет ко
|
VA |
|
|
|
A |
|
а |
|
C |
|
с |
O |
|
в |
О |
|
VB |
||
|
B |
Pис.9 а |
|
|
|
||
|
Pис.9 |
|
|
7
нец вектора ab =VBA .
Аналогично, VC =VA +VCA , VCA CA. Кроме того, VCA = CA .
VCA BA
Для того, чтобы определить вектор Oc =VC , разделим пополам на плане скоростей отрезок ав (рис.9а) полученную точку с соединим с точкой О вектором Oc =VC .
Теорема Жуковского.
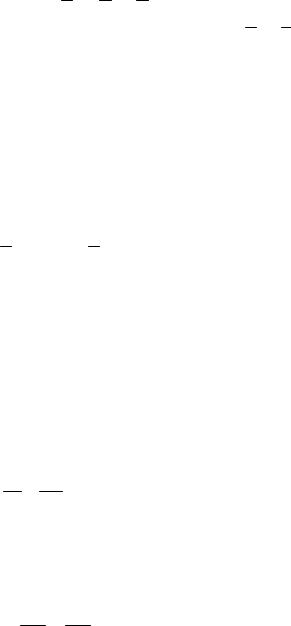
Проекции скоростей двух точек плоской фигуры на прямую, соединяющую эти точки, равны между собой (рис.10).
Рассмотрим две точки А и В плоской фигуры. Выбираем точку А за полюс, тогда скорость точки В связывается со
|
VBA |
VB |
скоростью точки А равенством |
|
VA |
VA |
VB =VA +VBA . |
||
900 β |
||||
α |
α |
|
||
А |
В |
|
Проектируя это равенство на прямую |
|
|
|
|
АВ, и учитывая, что VBA AB , находим
Рис. 10
VB cosβ =VA cosα.
Таким образом, проекции скоростей точек А и В на прямую АВ равны:
пр (VA)AB = пр(VВ)AB.
Мгновенный центр скоростей . Свойства м.ц.с.
Мгновенным центром скоростей называется точка Р плоскости, жестко связанной с плоской фигурой, скорость которой в данный момент равна нулю.
Теорема о существовании мгновенного центра скоростей.
VA |
|
А 900 В |
VB |
900 |
|
Докажем, что при плоском движении существует точка, скорость которой в данный момент равна нулю.
Пусть в момент времени t точки А и В плоской фигуры (рис.11) имеют скорости VA и VB, не параллельные друг другу. Проведем к скоростям в точках А
Ри В перпендикуляры и определим точку их пересече-
Рис.11 |
8 |
ния Р. Находим скорость этой точки с помощью теоремы Жуковского:
пр (VA)AР = пр(VP)AР.
пр (VВ)AР = пр(VP)AР.
Так как скорость VA AP , то ее проекция на прямую АР равна нулю, точно также проекция VB на прямую ВР равна нулю. Оказалось, что проекции скорости точки Р на две пересекающиеся прямые АР и ВР равны нулю, следовательно, скорость точки Р равна нулю.
Таким образом, точка Р является мгновенным центром скоростей.
Свойства мгновенного центра скоростей
Выберем мгновенный центр скоростей Р плоской фигуры за полюс. Тогда скорость точки А будет
VA =VP +VAP .
Скорость точки Р равна нулю, следовательно, VA =VAP .
Скорости точек плоской фигуры в данный момент определятся так, как будто плоская фигура вращается вокруг мгновенного центра скоростей.
Отсюда следует:
1. Скорость каждой точки направлена перпендикулярно отрезку, со-
единяющему точку с мгновенным центром скоростей:
VA AP, VB BP.
2. Скорость каждой точки равна произведению угловой скорости
плоской фигуры на расстояние точки до мгновенного центра скоростей.
VA =ω AP, VB =BP.
3. Скорости точек плоской фигуры пропорциональны их расстояни-
ям до мгновенного центра скоростей
VA = AP
VB BP
4.Угловая скорость плоской фигуры равна скоростей любой ее точки, деленной на расстояние до мгновенного центра скоростей.
ω = VAPA = VBPB .
9