

Целью лабораторных работ является освоение методов исследования типовых динамических звеньев и систем автоматического управления с использованием аналогового и цифрового моделирования.
ОБРАБОТКА РЕЗУЛЬТАТОВ И ОФОРМЛЕНИЕ ОТЧЕТА
Отчет по каждой из четырех лабораторных работ составляется на основании экспериментальных и расчетных данных, полученных с помощью АВМ (аналоговой вычислительной машины) и ПЭВМ. Он должен содержать :
наименование работы и ее цель;
определенного объема теоретическую часть работы с кратким описанием метода исследования, проведенного в работе;
по каждому из проведенных исследований звеньев или системы САУ схемы моделей на наборном поле АВМ и структурные схемы визуального моделирования с индивидуальными значениями параметров;
результаты расчета и полученные опытным путем экспериментальные данные;
графики полученных в результате аналогового и цифрового моделирования временных и частотных характеристик типовых звеньев;
краткий анализ полученных результатов по совпадению результатов моделирования в виде вывода в конце отчета.
1 Лабораторная работа I Исследование типовых внешних воздействий
Цель работы – изучение внешних воздействий, используемых для получения переходных и частотных характеристик типовых звеньев САУ.
1.1 Теоретические сведения
Дифференциальное уравнение САУ или ее части – типового звена- представляет собой уравнение динамического равновесия между входной и выходной величинами. Решение дифференциального уравнения описывает изменение выходной величины во времени при подаче на вход входной величины, изменяющейся по какому-либо закону. При разных законах изменения входной величины различным образом изменяется во времени и выходная величина, что зависит от технического устройства звена системы, которое может являться объектом любой физической природы, конструкции и назначения. Поэтому составление уравнения динамики каждого конкретного звена системы является предметом рассмотрения соответствующей конкретной области технических наук – электротехники, теплотехники, и т.п.). допустим, что в результате составления уравнения динамики какого-нибудь конкретного звена получилось линейное дифференциальное уравнение второго порядка :
![]() (1.1)
(1.1)
В теории автоматического управления принято приводить уравнение звена к стандартному виду в символической записи :
![]()
![]() ,
,
где
р обозначает операцию дифференцирования
(![]() ),
и введены обозначения для постоянных
времени и коэффициента усиления звена
соответственно :
),
и введены обозначения для постоянных
времени и коэффициента усиления звена
соответственно :
![]()
Процесс регулирования Y(t) складывается из двух частей : переходного процесса YПП(t) и установившегося процесса YУСТ(t) :
Y(t) = YПП(t) +YУСТ(t).
Математически переходный процесс определяется общим решением однородного уравнения (1.1), при Х(t)=0, а установившийся процесс – частным решением уравнения неоднородного уравнения (1.1), при заданной правой части Х(t). С точки зрения теоретической механики переходный процесс есть свободное движение системы, а установившийся процесс – вынужденное движение. С точки зрения теории колебаний первое есть собственные колебания, а второе – вынужденные колебания, но это ни в коем случае не означает, что переходный и установившийся процессы всегда по форме будут колебательными..
Для получения переходной характеристики подают мгновенно скачком на вход исследуемого звена некоторое постоянное значение вида :

и наблюдают переходный процесс (свободные колебания) на выходе звена. На коммутационном поле АВМ эта модель входного воздействия реализуется на масштабном операционном усилителе с изменяемым согласно варианта задания коэффициентом усиления :
![]() (1.2)
(1.2)
Такое идеальное звено не обладает инерционностью и мгновенно дает на выходе величину :
![]() (1.3)
(1.3)
Если на вход звена или системы подать сигнал синусоидальной формы с частотой ω вида :
 (1.4)
(1.4)
то на выходе в установившемся режиме получится тоже синусоидальный сигнал с той же частотой ω, но с другими амплитудой и фазой (наблюдение вынужденных колебаний звена).
1.2 Порядок выполнения работы
1 Записать передаточную функцию безинерционного звена для своего варианта задания по формулам (1.2) и (1.3) по параметрам из таблицы 1.1.
2 Промоделировать с помощью АВМ и ПЭВМ электронную модель ступенчатого воздействия согласно рис. 1.1.
3 Сравнить экспериментальные выходные
характеристики неединичного скачкообразного
воздействия, полученные различными
способами моделирования (аналоговым и
цифровым).
Сравнить экспериментальные выходные
характеристики неединичного скачкообразного
воздействия, полученные различными
способами моделирования (аналоговым и
цифровым).
Рисунок 1.1 – Схемы набора безинерционного звена
Таблица 1.1 – Параметры безинерционного звена
|
параметры |
№ варианта | |||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 | |
|
UВХ, В |
5 |
10 |
15 |
20 |
25 |
30 |
35 |
40 |
|
RBX, МОм |
0.2 |
0.4 |
0.6 |
0.8 |
0.5 |
0.9 |
0.6 |
0.8 |
|
ROC, МОм |
1.2 |
0.8 |
0.2 |
1.0 |
0.3 |
0.2 |
0.3 |
0.5 |
4 Проделав аналогичные операции (пп.1-3), получить выходные характеристики для гармонического синусоидального воздействия по рисунку 1.2 и таблице 1.2, сравнив полученные разными способами экспериментальные кривые.
5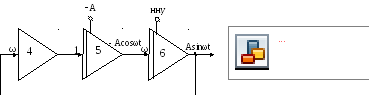 В соответствие с изложенными выше
требованиями составьте отчет по
лабораторной работе и подготовьтесь к
его защите, ответив на ниже следующие
контрольные вопросы.
В соответствие с изложенными выше
требованиями составьте отчет по
лабораторной работе и подготовьтесь к
его защите, ответив на ниже следующие
контрольные вопросы.
Рисунок 1.2 – Схемы набора гармонического синусоидального сигнала
Таблица 1.2 – Параметры для модели синусоидального сигнала
|
параметры |
№ варианта | |||||||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 | |
|
Xm, В |
20 |
10 |
25 |
50 |
35 |
40 |
45 |
35 |
|
ω,с –1 |
0.5 |
0.2 |
0.7 |
1 |
1.5 |
0.6 |
0.8 |
0.4 |