

4 Лабораторная работа IV Построение переходного процесса и исследование устойчивости системы автоматического управления.
Целью лабораторной работы является изучение и практическое применение критериев устойчивости и построение переходного процесса с определением прямых показателей качества замкнутой САУ.
4.1 Теоретические сведения
система автоматического управления (САУ) – система, состоящая из объекта управления и устройства управления, в которой автоматически выполняется заданный процесс. Регулятор или устройство управления (УУ) в САУ, вырабатывая управляющее (регулирующее) воздействия, воздействует на объект управления, тем самым поддерживая на заданном уровне или изменяя по определенному закону регулирующую величину. Структурная схема замкнутой АСР с регулятором представлена на рисунке 4.1.

рисунок 4.1 – Замкнутая САУ с регулятором
Для нормального функционирования замкнутой системы необходимо, чтобы отсутствовала статическая ошибка регулирования (ε=0), т.е. в установившемся режиме разность между заданным и текущим значениями регулируемой величины равна нулю. Из теории известно, что величины ε=0 можно достичь лишь путем ввода в исследуемую систему интегрирующего элемента, т.е. получения астатизма хотя бы первого порядка. В практике автоматизации технологических процессов объекты с точки зрения их динамики условно можно разбить на две группы :
- объекты, обладающие интегрирующими свойствами (объекты без самовыравнивания);
- объекты, не обладающие интегрирующими свойствами (объекты с самовыравниванием).
Исходя из того, что для обеспечения условия ε=0 необходимо присутствие астатизма первого порядка в контуре разомкнутой системы, то для управления объектами без самовыравнивания необходим П-регулятор, а для управления объектами с самовыравниванием, в составе которых нет интегрирующих элементов, используют регуляторы с интегрирующими свойствами (ПИ-регулятор). Передаточные функции типовых законов регулирования представлены ниже :
![]()
Таким образом, отсутствие статической ошибки обеспечивается путем выбора соответствующего закона управления. Но в реальных системах необходимо, чтобы система была устойчивой и не теряла ее при изменении параметров объекта, а также, чтобы текущие изменения регулируемой величины от заданного значения были минимально возможны при выбранном виде регулятора. Это обеспечивается путем выбора соответствующих значений параметров настройки регулятора. Для П-регулятора – это КР, для И – и ПИ – регуляторов – это параметры КР и Ти. задача определения параметров настройки введенного в исследуемую систему регулятора должна сочетаться с понятием устойчивости ее. Линейная система называется устойчивой, если при выведении ее внешними воздействиями из состояния равновесия (покоя) она возвращается в него после прекращения этих воздействий. Если после исчезновения внешнего воздействия система не возвращается к состоянию равновесия, то она либо является неустойчивой, либо находится на границе устойчивости.
Для определения устойчивости наиболее часто применяют алгебраический критерий Гурвица, который позволяет делать вывод об устойчивости на основании анализа коэффициентов характеристического уравнения исследуемой системы, представляющего собой приравненный нулю знаменатель выражения передаточной функции замкнутой САУ :
![]() (4.1)
(4.1)
где WОХВ(р) =WОУ(р)∙ WР(р) − передаточная функция охватываемой части системы;
WОС(р) − передаточная функция обратной связи (КОС=1);
WP(р)=WОХВ(р)∙ WОС(р) − передаточная функция разомкнутой системы.
В общем виде характеристическое уравнение для системы n-ого порядка примет вид :
![]() .
(4.2)
.
(4.2)
Из коэффициентов характеристического уравнения (1.2) строят сначала главный определитель Гурвица по следующему правилу: по главной диагонали определителя слева направо выписываются все коэффициенты характеристического уравнения от а1 до аn в порядке возрастания индексов. Столбцы вверх от главной диагонали дополняют коэффициентами характеристического уравнения с последовательно возрастающими индексами, а столбцы вниз – коэффициентами с последовательно убывающими индексами. На место коэффициентов с индексами больше n (n– порядок характеристического уравнения) и меньше нуля проставляют нули :
 .
(4.3)
.
(4.3)
Можно поступить и по другому, но результат будет тем же самым: в верхней строке определителя по порядку выписываются коэффициенты с нечетными индексами, начиная с а1; взамен недостающих элементов ставятся нули. Вниз от элементов 1-ой строки столбцы определителя заполняются коэффициентами с индексами, убывающими каждый раз на единицу; ниже а0 пишутся нули. Выделяя в главном определителе диагональные миноры, получаем определители Гурвица низшего порядка. Номер определителя Гурвица определяется номером коэффициента по диагонали, для которого составляется данный определитель. Критерий устойчивости Гурвица состоит в следующем: для того чтобы система автоматического управления была устойчива, необходимо и достаточно, чтобы все определители Гурвица имели знаки, одинаковые со знаком первого коэффициента характеристического уравнения а0 , т. е. при а0 >0 были положительными. Таким образом, при а0> 0 для устойчивости системы необходимо и достаточно выполнение следующих условий:
Δ1
> а1;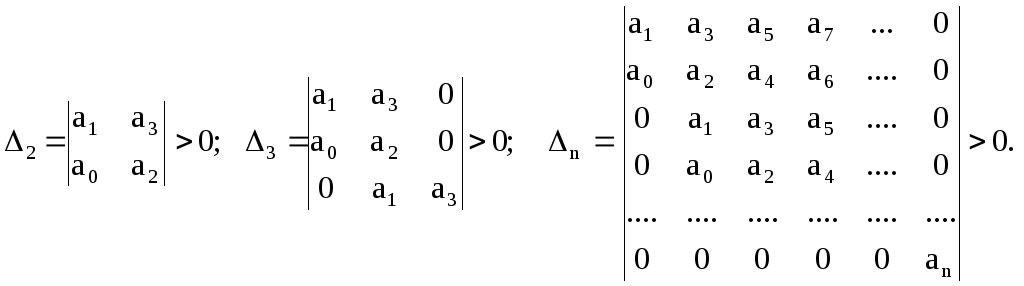
Раскрывая определители Гурвица, получим следующие условия устойчивости :
1
для уравнения первого порядка (n=1),
т. е.
![]() условия устойчивостиа0
> 0, а1
> 0;
условия устойчивостиа0
> 0, а1
> 0;
2
для уравнения второго порядка (n
=2),
т.е.
![]() ,
условия устойчивости а0
> 0, а1>
0, а2
>
0;
,
условия устойчивости а0
> 0, а1>
0, а2
>
0;
3 для уравнения третьего порядка (n=3), т. е.
![]() условия
устойчивости а0
> 0, а1>
0, а2
>
0 а3
>
0 ;
условия
устойчивости а0
> 0, а1>
0, а2
>
0 а3
>
0 ;
а1 ∙а2 − а0∙ а3> 0 ;
4 для уравнения четвертого порядка (n=4), т. е.
![]() условия
устойчивости а0
> 0, а1>
0, а2
>
0, а3
>
0, а4
>
0; а3
∙
(а1
∙а2
−
а0∙
а3)
−
условия
устойчивости а0
> 0, а1>
0, а2
>
0, а3
>
0, а4
>
0; а3
∙
(а1
∙а2
−
а0∙
а3)
−![]() >
0.
>
0.
Таким образом, необходимым и достаточным условием устойчивости для систем первого и второго порядков является положительность коэффициентов характеристического уравнения (4.2). Для уравнений третьего и четвертого порядков, кроме положительности коэффициентов, необходимо соблюдение дополнительных неравенств.
Обратим внимание, что в последнем столбце главного определителя Гурвица (4.3) отличен от нуля только один коэффициент аn ,поэтому :
![]() .
(4.4)
.
(4.4)
Отсюда видно, что при аn > 0 для проверки устойчивости системы достаточно найти только определители Гурвица от Δ1 до Δn -1. Если все определители Гурвица низшего порядка положительны, то система находится на границе устойчивости, когда главный определитель равен нулю Δn = 0. Это равенство выполняется в двух случаях : когда аn=0 или Δn-1=0. В первом случае система находится на границе апериодической устойчивости (один из корней характеристического уравнения равен нулю); во втором случае – на границе колебательной устойчивости (два комплексно-сопряженных корня находятся на мнимой оси). Используя критерий Гурвица, можно при заданных параметрах системы принять за неизвестный какой-либо из них и определить его критическое значение, при котором система будет находиться на границе устойчивости.
После решения задачи устойчивости исследуемой замкнутой САУ можно построить кривую переходного процесса, используя, по определению, в качестве типового входного воздействия Х3 (см. рисунок 4.1) функцию Хевисайда (единичный скачок). Определим показатели качества переходного процесса исследуемой САУ, представленного на рисунке 4.2. Склонность системы к колебаниям, а следовательно, и запас устойчивости могут быть охарактеризованы максимальным значением регулируемой величины Уmax или так называемым перерегулированием :
![]()
г де
де![]() представляет собой установившееся
значение регулируемой величины после
завершения переходного процесса.
представляет собой установившееся
значение регулируемой величины после
завершения переходного процесса.
Рисунок 4.2 – переходный процесс исследуемой САУ
Быстродействие системы может определяться по длительности переходного процесса tР. Длительность переходного процесса определяется как время, протекающее от момента приложения на вход единичного скачка до момента, после которого имеет место неравенство:
![]() ,
,
где = ± 5% – заданная малая постоянная величина, представляющая собой обычно допустимую ошибку регулирования.