

статика динамика учебник
.pdf3. ДИНАМІКА
Динаміка – це розділ механіки, у якому вивчаються закони руху матеріальних тіл під дією сил, що спричиняють цей рух.
3.1. Динаміка матеріальної точки
Під час вивчення цієї теми слід звернути увагу на основні поняття, визначення й закони динаміки, а також основні теореми динаміки матеріальної точки.
Другий закон Ньютона є вихідним для складання систем диференціальних рівнянь руху матеріальної точки. У випадку, коли маса точки стала, вираз цього закону має вигляд
m |
a |
F, |
(3.1) |
де m – маса точки; a – її прискорення; F – рівнодійна сил,
прикладених до точки.
3.1.1. Диференціальні рівняння руху матеріальної точки Рух матеріальної точки в просторі можна визначити трьома
способами: векторним, координатним і натуральним. Кожному з цих способів відповідає окрема форма диференціальних рівнянь руху точки.
Вважатимемо, що сили, які діють на точку, можуть залежати явно від часу, від положення точки й від швидкості руху точки.
Векторна форма:
|
|
|
|
|
|
|
(3.2) |
|
|
|
|
||||||
|
||||||||
mr |
F(t,r, r). |
|||||||
113
Координатна форма: |
|
mx Fx t,x,y,z,x,y,z , |
|
m y Fy t,x, y,z,x, y,z , |
(3.3) |
mz Fz t,x, y,z,x, y,z . |
|
Цілком зрозуміло, що під час руху точки в одній площині кількість рівнянь зменшується до двох.
Натуральна форма:
|
|
, |
|
|
ms F t,s,s |
|
|||
|
|
2 |
|
|
m |
s |
F t,s,s , |
(3.4) |
|
|
||||
|
|
n |
|
|
|
|
|
|
|
0Fв t,s,s .
Зостаннього рівняння випливає, що вектор рівнодійної сили завжди лежить у стичній площині траєкторії, бо його проекція на бінормаль дорівнює нулю.
3.1.2. Основні задачі динаміки точки Перша, або пряма, задача полягає у визначенні рівнодійної сил,
які спричиняють заданий рух точки з певною відомою масою точки.
Розв'язування першої задачі динаміки точки можна звести до визначення прискорень з кінематичних рівнянь руху, використавши їх потім у рівняннях (3.2) – (3.4).
114
Друга, або обернена, задача полягає у визначенні закону руху точки або її швидкості за відомою масою точки, заданими силами й початковими умовами руху.
Розв'язування другої задачі динаміки точки зводиться до інтегрування системи диференціальних рівнянь руху матеріальної точки.
Трапляються задачі змішаного типу, де доводиться визначати як закон руху точки, так і сили, що діють на точку. Такі задачі трапляються в динаміці невільної матеріальної точки.
Задати початкові умови руху точки – означає вказати положення точки та її швидкість у деякий фіксований момент часу
t t0 .
Під час розв'язування задач динаміки точки рекомендується така послідовність дій.
Перша основна задача динаміки:
1.Зобразити точку в довільному положенні й прикласти до неї всі діючі сили.
2.Вибрати систему відліку.
3.Двічі продиференціювати задані функції часу, якими визначають закон руху точки.
4.Підставити одержані вирази в рівняння (3.3) або (3.4).
5.За одержаними рівняннями дістати шукану величину.
Друга основна задача динаміки:
1.Зобразити точку в довільному положенні й прикласти до неї всі задані активні сили й реакції в'язей, якщо точка невільна.
2.Вибрати систему відліку.
3.Скласти диференціальні рівняння руху точки у формі (3.3)
або (3.4).
4.Записати початкові умови.
5.Проінтегрувати диференціальні рівняння.
115

6. З початкових умов визначити сталі інтегрування.
3.1.3.Вправи
1.Автомобіль масою 1000 кг рухається по опуклому мосту зі
швидкістю V 10мс . Радіус кривизни в середині моста 50м.
Визначити силу тиску автомобіля на міст у момент проходження його через середину мосту.
|
2. Вантажу М надали в точці А початкову швидкість V 15 |
м |
||
|
|
|
0 |
с |
|
|
|
|
|
|
M |
й він почав рухатися вгору |
по негладкій |
|
|
похилій площині. Коефіцієнт |
тертя f |
0,1. |
|
|
|
|||
A |
30 |
Який шлях пройде вантаж до зупинки? За |
||
який час вантаж пройде цей шлях?
3.1.4.Питання для самоконролю
1.Запишіть основне рівняння динаміки точки.
2.Від яких параметрів може залежати сила?
3.Запишіть диференціальні рівняння руху точки в координатній та натуральній формах.
4.Сформулюйте дві основні задачі динаміки точки.
3.2.Динаміка механічної системи
Під час вивчення цього розділу особливу увагу слід звернути на такі питання, як класифікація сил, що діють на механічну систему,
властивості внутрішніх сил, на поняття механічна система,
незмінювана механічна система, маса системи, радіус інерції та інші.
116

3.2.1. Геометрія мас Центром мас системи називається геометрична точка С, радіус-
вектор якої
r |
mk |
rk , |
(3.5) |
c |
M |
|
де M mk – маса системи.
У проекціях на координатні осі Оху:
xc |
|
mk xk |
, |
|
|
M |
|
|
|||
|
|
|
|
(3.6) |
|
|
|
mk yk |
|
||
yc |
|
|
|
||
M |
. |
|
|||
|
|
|
|
|
|
Крім центру мас у механіці розглядається ще одна характеристика розподілення мас – момент інерції твердого тіла відносно осі обертання.
Моментом інерції твердого тіла відносно осі обертання Oz
називається скалярна величина, що дорівнює сумі добутків маси кожної точки тіла на квадрат відстані від цієї точки до осі:
Jz mkhk2. |
(3.7) |
Радіусом інерції тіла відносно осі Oz називається лінійна величина i , що визначається рівнянням
Jz M i2, |
(3.8) |
де М – маса тіла.
117
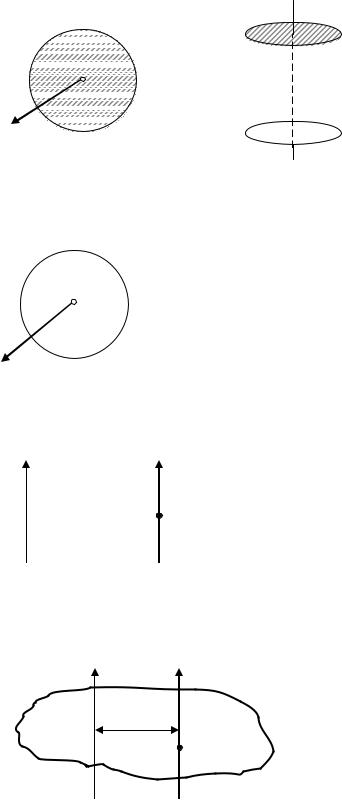
Моменти інерції деяких тіл:
1. Кругла однорідна пластина або циліндр радіуса R і маси М
(рисунок Д.1):
Z
Z |
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
z |
|
1 |
MR2 |
. (3.9) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рисунок Д.1
2. Тонке кругле кільце або тонкостінний циліндр радіуса R і маси М
(маса рівномірно розподілена по ободу) (рисунок Д.2):
Jz MR2. |
(3.10) |
Z
Рисунок Д.2
3. Тонкий однорідний стрижень довжини l та маси М (рисунок Д.3):
Z1 |
Z |
Jz |
|
1 |
|
M l |
2 |
, |
(3.11) |
|
|
|
3 |
|
|
||||||
|
C |
1 |
|
|
|
|
|
|
|
|
|
|
Jc |
|
1 |
Ml2. |
|
(3.12) |
|||
|
Рисунок Д.3 |
|
||||||||
|
|
|
||||||||
|
Z |
12 |
|
|
|
|
||||
4. Момент інерції тіла відносно паралельних осей (формула Гюйгенса):
Z1 |
Z |
|
|
|
|
|
d |
Jz |
Jc |
Md2. |
(3.13) |
|
C |
||||
|
1 |
|
z |
|
|
|
|
|
|
|
Рисунок Д.4
118

Моменти інерції інших тіл подано в довідниках.
3.2.2. Теорема про рух центра мас механічної системи Центр мас механічної системи рухається як матеріальна точка
масою, що дорівнює масі всієї системи, до якої прикладені всі зовнішні сили, котрі діють на систему.
|
|
n |
|
||
M |
a |
c |
|
e, |
(3.14) |
Fk |
|||||
|
|
k 1 |
|
||
отже, добуток маси системи на прискорення її центра мас дорівнює геометричній сумі всіх зовнішніх сил, що діють на систему.
У проекціях на координатні осі Оху:
|
|
|
|
n |
|
|
||
|
|
|
|
|
|
e |
|
|
|
|
M xc |
Fkx |
, |
|
|||
|
|
|
|
k 1 |
|
(3.15) |
||
|
|
|
|
n |
|
|||
|
|
|
|
|
|
|||
|
|
|
|
|
|
e |
|
|
|
|
|
Fky |
. |
|
|||
|
|
M yc |
|
|||||
|
|
|
|
k 1 |
|
|
||
Закони збереження руху центра мас системи (наслідки з |
||||||||
теореми): |
|
|
|
|
|
|||
1. Якщо |
Fke 0, тоді |
a |
c 0 |
|
|
|
|
|
і Vc |
const. |
|
||||||
Якщо сума всіх зовнішніх сил, що діють на систему, дорівнює нулю,
то центр мас цієї системи перебуває в стані спокою або рухається зі сталою за модулем і напрямком швидкістю, тобто рівномірно й прямолінійно.
|
2.Якщо |
e |
0, тоді |
|
0 |
|
const, а при |
|
|
Fkx |
xc |
і xc |
|||||
|
0 |
xc |
const. |
|
|
|
|
|
xc0 |
|
|
|
|
||||
Якщо сума проекцій усіх зовнішніх сил на будь-яку вісь, дорівнює нулю, то проекція швидкості на цю вісь є величина стала. Зокрема,
якщо в початковий момент швидкість центра мас системи дорівнювала нулю, то центр мас системи вздовж осі Ох
переміщуватися не буде (xc const).
119

3.2.3. Теорема про зміну кількості руху механічної системи
Кількістю руху точки Q називається векторна величина mV ,
що дорівнює добутку маси точки на вектор її швидкості |
|
Q mV. |
(3.16) |
Кількість руху системи дорівнює геометричній сумі кількостей руху всіх точок системи:
Q Qk mkVk . |
(3.17) |
Під час обчислювання кількостей руху твердих тіл зручно користуватися формулою
Q MVc. |
(3.18) |
Теорема в диференціальній формі: похідна за часом від кількості руху системи дорівнює геометричній сумі зовнішніх сил,
що діють на систему.
dQ |
|
Fke. |
(3.19) |
|
|||
dt |
|
||
Теорема в інтегральній формі: зміна кількості руху системи за деякий проміжок часу дорівнює геометричній сумі імпульсів зовнішніх сил, що діють на систему, за той же проміжок часу
|
|
|
|
|
|
|
(3.20) |
Q1 Q0 Ske. |
|||||||
120

Закони збереження кількості руху системи (наслідки з теореми): 1. Якщо Fke 0, тоді Q const.
Якщо сума всіх зовнішніх сил, що діють на систему, дорівнює нулю,
то кількість руху цієї системи залишається постійною за модулем і напрямком.
2. Якщо Fkxe 0, тоді Qx const.
Якщо сума проекцій на будь-яку вісь усіх зовнішніх сил, що діють на систему, дорівнює нулю, то проекція кількості руху на цю вісь є величина стала.
Внутрішні сили змінити сумарну кількість руху системи не можуть.
3.2.4.Вправи
1.Тіло з центром мас у точці С лежить на ідеально гладенькій
|
|
|
|
|
горизонтальній |
|
площині |
в стані |
||
С |
|
F |
|
|
спокою. |
Потім |
|
до точок А та В |
||
|
A |
В |
приклали дві |
|
однакові |
горизон- |
||||
|
тальні |
сили |
|
|
, спрямовані в |
|||||
|
|
|
|
|
|
F |
||||
|
|
|
|
F |
протилежні |
|
боки. |
Запишіть |
||
|
|
|
|
|
|
|||||
теорему про рух центра мас для цього тіла й поясніть, як буде рухатись тіло й у якому напрямі стане рухатися точка А.
2. Візок з похилою |
площиною вагою Р1 |
рухається |
по |
|||||||
Y |
горизонтальній |
площині |
зі |
|||||||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
швидкістю V1 |
. Уздовж похилої |
||||
|
|
V2 |
||||||||
|
|
площини ковзає вантаж вагою |
||||||||
|
|
|||||||||
V1 |
|
|
|
|
|
|
||||
Р2 зі швидкістю V2 .
O 
 X
X
Знайдіть:
а) проекції кількості руху системи на осі Х та Y;
121

|
|
|
|
б) головний вектор кількості руху системи Q . |
|
||||
|
|
|
|
Чи мають місце закони збереження проекцій кількості руху |
|||||
системи на осі координат? |
|
|
|
|
|
||||
|
|
|
|
3. Кривошипно-шатунний механізм складається з однорідних |
|||||
|
|
|
y |
|
|
|
стрижнів |
ОА=АВ=l |
|
|
|
|
|
|
|||||
|
|
|
|
A |
|
|
|
вагою Р |
кожний і |
|
|
|
|
|
|
|
повзуна В вагою Q. |
||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Напишіть: |
|
O |
|
|
|
|
B |
x |
а) |
координати |
|
|
|
|
|
|
центра мас механізму в |
||||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
залежності від кута ; |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
б) диференціальні рівняння руху центра мас у проекціях на |
|||||
координатні осі, нехтуючи тертям. |
|
|
|
|
|||||
3.2.5.Запитання для самоконтролю
1.Що розуміють під поняттям внутрішніх і зовнішніх сил системи матеріальних точок?
2.Чому головний вектор внутрішніх сил і їхній головний момент відносно будь-якого центра дорівнюють нулю?
3.Що розумють під поняттям центра мас системи матеріальних
точок?
4.Напишіть формули координат центра мас.
5.Як виражається кількість руху системи через швидкість центра мас?
6.Сформулюйте й запишіть теорему про зміну кількості руху точки й системи в диференціальній та інтегральній формах.
7.У чому суть законів збереження кількості руху системи матеріальних точок?
8.Як пояснити на підставі цих законів принцип реактивного
руху?
9.У чому суть законів збереження руху центра мас?
122