

статика динамика учебник
.pdf10.Чому людина не може рухатися по ідеально гладенькій горизонтальній площині?
11.За яких умов центр мас системи знаходиться в спокої та за яких умов він рухається рівномірно й прямолінійно?
3.2.6. Теорема про зміну моменту кількості руху (кінетичного моменту) механічної системи
Момент кількості руху матеріальної точки відносно центра О визначається формулою
m0 mV |
|
|
|
|
|
|
r |
mV |
. |
(3.21) |
|||
Головний момент кількості руху (кінетичний момент)
механічної системи відносно центра О дорівнює геометричній сумі моментів кількостей руху матеріальних точок цієї системи відносно цього самого центра:
|
|
|
m |
0 mVk |
|
|
|
|
|
L0 |
rk mkVk . |
(3.22) |
|||||
|
|
|
|
k |
|
|||
Аналогічно визначається момент кількості руху відносно будь-
якої нерухомої осі:
Lz mz mkVk . |
(3.23) |
Кінетичний момент твердого тіла, що обертається навколо нерухомої осі Oz, визначається за формулою
Lz Jz . |
(3.24) |
123

Теорема: похідна за часом від головного моменту кількості руху системи відносно нерухомого центра дорівнює геометричній сумі моментів усіх зовнішніх сил, що діють на систему, відносно цього самого центра:
dL0 |
m0 |
Fke . |
(3.25) |
|
|||
dt |
|
||
У проекції на координатну вісь Oz матимемо
dLz |
mz |
Fke . |
(3.26) |
|
|||
dt |
|
||
Закони збереження кінетичного моменту механічної системи
(наслідки теореми):
1. Нехай m0 (Fke ) 0, тоді L0 const.
Якщо геометрична сума моментів усіх зовнішніх сил відносно нерухомого центра дорівнює нулю, то кінетичний момент системи відносно цього самого центра сталий.
2. Нехай mz (Fke ) 0, тоді Lz const.
Якщо сума моментів усіх зовнішніх сил відносно нерухомої осі дорівнює нулю, то головний момент кількості руху системи відносно цієї самої осі сталий.
3.2.7.Вправи
1.Через блок, масою якого нехтуємо, перекинуто канат; за
|
|
|
|
|
точку А каната схопилася людина, до точки В |
|
|
|
|
|
|
|
|
|
|
|
підв’язано вантаж однакової маси з людиною. |
|
|
|
|
|
Визначити: |
A |
|
|
|
B |
а) що станеться з вантажем, якщо людина |
|
|
|
|
|
|
124

почне підніматися по канату зі швидкістю V відносно каната?
б) швидкість вантажу, якщо маса блока буде в чотири рази менша за масу людини. Вважати, що маса блока рівномірно розподілена по його ободу.
2. Горизонтальна трубка ОА вагою Р й довжиною l може вільно обертатися навколо вертикальної осі Z.
z |
|
|
|
|
Усередині |
трубки |
на |
відстані |
l |
від осі |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|||||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
B |
|
знаходиться |
кулька |
В |
вагою Q. У деякий |
||
O |
|
|
|
A момент часу трубці надається початкова кутова |
|||||||
|
|
|
|
|
|
швидкість 0 . Визначити кутову швидкість |
|||||
|
|
|
|
|
|
трубки в момент, коли кулька вилетить із |
|||||
|
|
|
|
|
|
трубки. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
3.2.8.Запитання для самоконтролю
1.За якого розміщення вектора кількості руху матеріальної точки його момент відносно осі дорівнює нулю?
2.Що називається головним моментом кількості руху системи
(кінетичним моментом) відносно центра та осі?
3.Як визначається кінетичний момент твердого тіла, яке обертається навколо нерухомої осі?
4.Сформулюйте й запишіть теорему про зміну кінетичного моменту системи відносно центра й осі.
5.У чому полягає суть законів збереження кінетичного моменту системи відносно центра й осі?
3.2.9.Кінетична енергія, робота й потужність сил Кінетична енергія механічної системи дорівнює сумі
кінетичних енергій усіх точок системи
125

T Tk |
m V2 |
|
||
k k |
. |
(3.25) |
||
2 |
||||
|
|
|
||
Формули для обчислення кінетичної енергії під час основних
рухів.
Поступальний рух: |
|
|
|
|
|||
C |
|
|
C |
T |
1 |
mV2. |
(3.26) |
|
|
||||||
|
|
|
|||||
|
|
|
|
||||
|
|
|
|
2 C |
|
||
Рисунок Д.5
Обертальний рух навколо нерухомої осі:
|
C |
|
1 |
|
|
|
|
|
|
|
||
|
|
|
T |
Jz 2. |
|
|
|
|
(3.27) |
|||
Z |
|
|
|
|
||||||||
|
|
|
|
|
|
|||||||
2 |
|
|
|
|
|
|
|
|||||
Рисунок Д.6 |
|
|
|
|
|
|
|
|
|
|
||
Плоский рух: |
|
|
|
|
|
|
|
|
|
|
||
|
|
C |
T |
1 |
mV2 |
|
1 |
J |
2. |
(3.28) |
||
|
|
|
|
|
||||||||
|
|
|
|
|
|
2 |
C |
2 |
z |
|
|
|
|
|
|
де m – маса тіла; VC – швидкість центра |
|||||||||
|
|
|
мас. |
|
|
|
|
|
|
|
||
Рисунок Д.7
Робота змінної сили (рисунок Д.8) визначається за формулами:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
Fdr |
|
, |
(3.29) |
|
M |
|
|
V |
|
M1 |
|
||||||||
|
|
|
|
|
|
|
M0M1 |
|
||||||
|
|
r |
|
|
|
F |
|
|
|
|
|
|
|
|
M0 |
|
|
O |
|
|
|
|
|
|
|
||||
Рисунок Д.8
126

|
|
|
|
|
A |
Fxdx Fydy Fzdz , |
(3.30) |
||||||
|
|
|
|
|
M0M1 |
|
|
|
|
|
|||
|
|
|
|
|
A |
F ds Fcos |
|
, |
ds. |
(3.31) |
|||
|
|
|
|
|
F |
||||||||
|
|
|
|
|
M0M1 |
M0M1 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
F |
Робота |
сталої за величиною |
та напрямом |
|||||||||
|
|
|
|
|
|||||||||
|
|
|
|
сили |
|
|
на прямолінійному переміщенні S |
||||||
F |
|||||||||||||
|
|
|
|||||||||||
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
(рисунок Д.9):
Рисунок Д.9
A FScos . |
(3.32) |
Якщо
0 , тоді A F S ;
90 , тоді A 0;
180 , тоді A F S .
Приклад.
|
|
|
|
|
|
|
|
|
|
A( |
|
|
|
) P S cos 90 P S sin ; |
|
|
|
|
|
|
|
|
|
|
P |
||||||
|
|
|
|
|
N |
|
|
||||||||
Fтер |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
A(N) N S cos90 0; |
||||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
S |
|
A( |
|
тер ) Fтер S cos180 Fтер S, |
|||||
|
|
|
|
|
F |
||||||||||
|
|
|
|
|
90 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
P |
|
|
де Fтер f N f P cos . |
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Робота пружної сили визначається за формулою
A(F ) c 2 2 ,
пр 2 0 1
де с – жорсткість пружного елемента; 0, 1
початкова й кінцева абсолютні деформації пружини.
(3.33)
– відповідно
127

Робота обертального моменту (рисунок Д.10) визначається так:
|
|
Mоб |
|
|
|
|
|
1 |
|
|
|
|
A Mобd , |
(3.34) |
|
|
|
||
|
|
0 |
|
|
|
|
|
||
|
|
1 |
|
|
Рисунок Д.10
а коли момент сталий, тоді
A Mоб 1 . |
(3.35) |
Потужністю сили називається величина, що визначає роботу,
виконувану силою за одиницю часу:
N |
dA |
|
F ds |
F |
V F V cos( |
|
|
|
|
|
|
F |
,V |
). |
(3.35) |
||||||||
|
|
||||||||||
|
dt |
dt |
|
|
|
|
|
|
|||
3.2.10. Теорема про зміну кінетичної енергії механічної системи Теорема (диференціальна форма):
dT |
Nke Nki . |
(3.36) |
|
||
dt |
|
|
Похідна за часом від кінетичної енергії механічної системи дорівнює сумі потужностей усіх зовнішніх і внутрішніх сил, що діють на систему.
Теорема (інтегральна форма):
T T0 Ake Aki . |
(3.37) |
128
Зміна кінетичної енергії механічної системи на деякому її переміщенні дорівнює алгебраїчній сумі робіт на цьому переміщенні всіх зовнішніх і внутрішніх сил, що діють на систему.
Для незмінюваної механічної системи сума робіт усіх внутрішніх сил дорівнює нулю й рівняння (3.37) має вигляд:
T T0 Ake , |
(3.38) |
де T0 та T – кінетична енергія системи відповідно в початковому й кінцевому положенні.
Розв’язування задач за допомогою теореми про зміну кінетичної енергії в інтегральній формі рекомендується виконувати в такій послідовності:
а) подати на рисунку всі зовнішні та внутрішні сили ситеми (у
разі незмінюваної механічної системи – тільки зовнішні сили);
б) вирахувати суму робіт усіх зовнішніх і внутрішніх сил на переміщеннях точок системи (у разі незмінюваної механічної системи – тільки суму робіт зовнішніх сил);
в) вирахувати кінетичну енергію системи в її початковому й кінцевому положеннях;
г) записати теорему про зміну кінетичної енергії системи,
скориставшись результатами обчислень пунктів б) й в), і визначити шукану величину.
3.2.11.Вправи
1.Пружину жорсткості с розтягують з ненапруженого стану на 2 см, а потім ще на 1 см:
а) вирахуйте роботу, виконану під час першого й другого
розтягувань;
129
б) у якому випадку виконується більша робота?
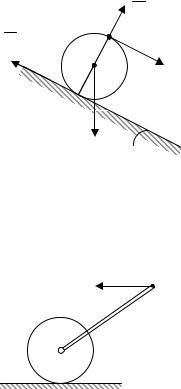
2. Коток вагою Р скочується по похилій площині без ковзання.
Тертям кочення знехтувати.
Вирахуйте:
N
Аа) роботу сил, якщо вісь котка С
Fтер |
|
|
|
|
|
|
|
|
|
|
||||
|
V перемістилася на відстань S; |
|
||||||||||||
|
|
С |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
б) роботу сил з урахуванням тертя |
||||
|
|
|
|
|
|
|
|
|
|
кочення, якщо |
коефіцієнт тертя кочення |
|||
|
|
P |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
дорівнює ; |
|
|
|
|
|
в) кінетичну |
|
|
|
|
|
|
|
|
|||||
|
|
енергію котка, вважаючи його однорідним |
||||||||||||
|
|
|
|
|
|
|
|
|
|
. |
|
|||
циліндром, якщо швидкість точки А дорівнює V |
|
|||||||||||||
|
3. Однорідний циліндричний коток, вага якого Р, |
виводить із |
||||||||||||
|
|
|
|
|
|
|
|
|
|
стану спокою стала горизонтальна сила F, |
||||
|
|
|
F |
|||||||||||
|
|
|
|
В |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
прикладена до кінця В рукоятки АВ, що |
||||
|
А |
|
|
|
|
|
переміщається |
поступально. |
Визначити |
|||||
|
|
|
|
|
|
прискорення кінця В рукоятки, якщо її вага |
||||||||
|
|
|
|
|
|
|
|
|
|
|||||
дорівнює Q.
3.2.12.Запитання для самоконтролю
1.Що називається елементарною роботою сили? Запишіть формули елементарної роботи сили під час векторного,
координатного й натурального способів задання руху точки.
2.За яких умов робота сили додатна, від’ємна, дорівнює нулю?
3.Як вираховується робота сили ваги? Чи залежить робота сили ваги від шляху переміщення точки?
4.Як вираховується робота сили пружності?
5.Як вираховується робота сили, прикладеної до твердого тіла,
що обертається навколо нерухомої осі?
130

6.Що називається потужністю сили? Як вираховується потужність сил під час поступального й обертального рухів тіла?
7.Що називається кінетичною енергією точки, системи?
8.Як вираховується кінетична енергія під час поступального,
обертального й плоского рухів твердого тіла?
9. Сформулюйте й запишіть теорему про зміну кінетичної енергії точки й системи в диференціальній та інтегральній формах.
3.3. Принципи механіки
Рівняння руху або умови рівноваги механічної системи можна одержати, якщо покласти в основу замість законів Ньютона інші загальні положення, у яких міститься повна інформація про механічний рух і рівновагу механічної системи. Ці положення називаються принципами механіки.
3.3.1. Сила інерції, головний вектор і головний момент сил інерції Для матеріальної точки силою інерції називається вектор, що за модулем дорівнює добутку маси точки на її прискорення й
напрямлений протилежно вектору прискорення точки:
|
F |
i m |
a |
. |
(3.39) |
Для механічної системи, що складається з n матеріальних точок, розглянемо головний вектор сил інерції Ri та головний момент сил інерції MOi відносно деякого центра О:
131

Ri Fki mkak ,
(3.40)
MOi mO Fki rk mk ak .
Якщо за центр зведення сил інерції вибрати центр мас механічної системи, то за будь-якого руху головний вектор сил інерції
|
R |
i m |
a |
C , |
(3.41) |
де m mk – маса механічної системи, aC – прискорення її центра мас.
|
|
|
Розглянемо деякі випадки руху твердого тіла. |
|
|||||||||||
1. Поступальний рух твердого тіла: |
|
|
|
||||||||||||
|
|
i |
|
|
|
|
|
головний вектор сил інерції |
|
||||||
|
|
|
|
|
|
|
|
||||||||
RC |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
aC |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
i m |
a |
; |
(3.42) |
||
|
|
|
C |
|
|
R |
|||||||||
|
|
|
|
|
C |
C |
|
||||||||
|
|
|
|
|
|
|
|
головний момент сил інерції дорівнює |
|||||||
|
|
|
Рисунок Д.11 |
|
|||||||||||
|
|
|
|
|
|||||||||||
|
|
|
|
|
нулю |
|
Ci |
0. |
|
||||||
|
|
|
|
|
|
|
|||||||||
|
|
|
M |
|
|||||||||||
2. Обертання твердого тіла навколо нерухомої осі, що перпендикулярна до площини матеріальної симетрії тіла і проходить через його центр мас:
|
|
MZi |
RCi 0, оскільки |
a |
C 0; |
|
|||||
|
C |
|
|
|
|
|
|
|
|
||
Z |
MZi |
JZ |
, |
(3.43) |
|||||||
|
|
||||||||||
|
|
||||||||||
|
|
де |
– кутове прискорення тіла. |
||||||||
Рисунок Д.12
132