

Тема 4: Амплітудні та фазові частотні характеристики елементарних ланок
Теоретичні відомості
Комплексна
передавальна функція
 знаходиться при підстановці
знаходиться при підстановці у
вираз відповідної передавальної функції
у
вираз відповідної передавальної функції
 .
.
Комплексна
передавальна функція
 може бути представлена в показниковій
формі:
може бути представлена в показниковій
формі:
 ,
,
де
 - модуль комплексної передавальної
функції, це
амплітудна частотна характеристика
(АЧХ);
- модуль комплексної передавальної
функції, це
амплітудна частотна характеристика
(АЧХ);
 -
аргумент комплексної передавальної
функції, це фазова
частотна характеристика
(ФЧХ).
-
аргумент комплексної передавальної
функції, це фазова
частотна характеристика
(ФЧХ).
Алгебраїчна форма комплексної передавальної функції:
 ,
,
де
 ,
,
 - відповідно дійсна і уявна частотні
характеристики.
- відповідно дійсна і уявна частотні
характеристики.
Комплексна
передавальна функція
 може
бути зображена вектором (рис. 6,a).
може
бути зображена вектором (рис. 6,a).
 ,
,
Оскільки
АЧХ та ФЧХ є функціями частоти, то довжини
вектора
 та
кут його повороту змінюються із зміною
частоти
та
кут його повороту змінюються із зміною
частоти
 ,
як наведено на рис. 6,б.
,
як наведено на рис. 6,б.
Крива,
що описується кінцем вектора
 при зміні частоти
при зміні частоти від 0 до
від 0 до ,
називаєтьсяамплітудно-фазовою
частотною характеристикою ланки або
системи (АФЧХ).
,
називаєтьсяамплітудно-фазовою
частотною характеристикою ланки або
системи (АФЧХ).

































Рис.
6. Зображення вектора комплексної
передавальної функції a
– в декартовій системі координат; б
– Зміна довжини та кута повороту вектора
 при зміні частоти
при зміні частоти .
.
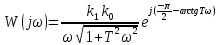
Задача №1. Знайти частотні характеристики для системи АК в розімкнутому стані.


X
Y







Маємо послідовне з’єднання ланок:
 ;
;

 ;
;
 ;
;
 ;
;
 .
.
Випишемо амплітудну та фазові ЧХ:

 .
.
Виділимо дійсну та уявну частотні характеристики, маємо:

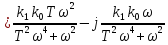
 ;
;
 .
.
Тема 5: Визначення стійкості. Алгебраїчні критерії стійкості. Критерії стійкості Гурвіца і Рауса.
Теоретичні відомості
Під стійкістю системи автоматичного керування розуміютьїх здатність повертатись до вихідного усталеного режиму після короткочасної дії керуючої чи збурюючої величини, яка виводить систему з початкової рівноваги.
Динамічні властивості лінійних систем описуються неоднорідними диференційними рівняннями з постійними коефіцієнтами. Ці рівняння прийнято записувати у вигляді

 .
.
де y – регульована величина, x – вхідна дія.
Ліва частина диференціального рівняння описує вільний рух системи

Цей рух стійкий, якщо

де
 - загальний розв’язок
однорідного диференціального рівняння.
- загальний розв’язок
однорідного диференціального рівняння.
Розв’язок однорідного диференціального рівняння знаходять у формі
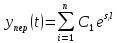
де
 - сталі інтегрування,
- сталі інтегрування, - корені характеристичного рівняння
системи.
- корені характеристичного рівняння
системи.
Характеристичне рівняння складається на основі диференціального рівняння системи. Разом з тим характеристичне рівняння є рівнянням для полюсів передаточної функції і може бути отримане з передаточної функції замкнутої системи, якщо знаменник передаточної функції прирівняти до нуля
 .
.
Корені
характеристичного рівняння можуть бути
дійсними або комплексними числами. Для
довільних пари комплексних коренів
можна записати

де
 і
і дійсна і уявна частиниі
кореня.
дійсна і уявна частиниі
кореня.
Для стійкості лінійних систем необхідно і достатньо, щоб корені характеристичного рівняння були від’ємними і комплексними числами від’ємними, дійсними частини. Загальну умову стійкості можна сформулювати інакше: система є стійкою коли корені характеристичного рівняння лежать в лівій півплощині комплексної площини коренів (рис. 7). Таким чином, уявна вісь є межею, яка ділить комплексну площину коренів на дві області – ліву стійку і праву – нестійку. Система знаходиться на межі стійкості, якщо один з коренів попадає на уявну вісь. При цьому в системі виникають автоколовання. В такому режимі лінійна система експлуатуватися не може.
jβ
jβ





 α
α






а) б)
Рис. 7 Аналіз стійкості за коренями характеристичного рівняння: а) – система стійка; б) – система нестійка.
Існують методи, що дозволяють досліджувати стійкість систем автоматичного керування без знаходження коренів характеристичного рівняння. Вони мають назву критеріїв стійкості. Критерії стійкості поділяються на алгебраїчні і частотні. До алгебраїчних належать критерії
Рауса, Гурвіна, Льєнара-Шіпара, до частотних – критерії Михайлова та Найквіста.
Найчастіше
для аналізу стійкості систем невисокого
порядку
 та
систем, до складу яких не входять особливі
ланки, використовують критерій Гурвіна,
який приводить до тієї ж самої системи
нерівностей, що і критерій Рауса. Тому,
інколи, ці критерії називають критеріями
Рауса-Гурвіна.
та
систем, до складу яких не входять особливі
ланки, використовують критерій Гурвіна,
який приводить до тієї ж самої системи
нерівностей, що і критерій Рауса. Тому,
інколи, ці критерії називають критеріями
Рауса-Гурвіна.
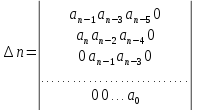
Для
аналізу стійкості системиза критерієм
Гурвіцаскладають визначник з коефіцієнтів
характеристичного рівняння таким чином,
що по головній діагоналі розташовують
коефіцієнти від
 до
до ,
далі місця в стовпцях над діагоналлю
заповнюють коефіцієнтами в порядку
зростання індексів, а знизу від діагоналі
– із меншими індексами. Пусті місця
заповнюють нулями.
,
далі місця в стовпцях над діагоналлю
заповнюють коефіцієнтами в порядку
зростання індексів, а знизу від діагоналі
– із меншими індексами. Пусті місця
заповнюють нулями.
За
критерієм Гурвіца замкнута система
стійка, якщо при додатному знаку
коефіцієнта
 ,
є також додатним, головний визначник
Гурвіца∆
і всі його діагональні мінори -
,
є також додатним, головний визначник
Гурвіца∆
і всі його діагональні мінори -
 ,
, ,…,
,…, .
.
Діагональні мінори утворюють з головного визначника шляхом викреслювання відповідного числа рядків і стовпців.
Застосування критерію стійкості Гурвіца до системи першого і другого порядків показує, що вони є стійкими при додатних параметрах системи, однак системи третього і вищого порядків можуть втратити стійкість і при додатних значеннях параметрів.
Частотні критерії стійкості є досить зручними для аналізу стійкості систем високого порядку та систем із постійним запізненням.
При аналізі систем автоматичного керування важливо встановити аплив окремих параметрів системи на її стійкість та визначити область допустимих значень параметрів. Для цього можуть бути використані розглянуті вище критеріїстійкості метож D-розбиття.
Зокрема
для знаходження критичного значення
варійованого коефіцієнта передачі
 чи однієї з постійних часу
чи однієї з постійних часу ,
при яких система буде знаходитись на
межі області стійкості, можна скористатися
критерієм стійкості Гурвіца. Для цього
необхідно прирівняти до нуля головний
визначник відповідні мінори визначника
Гурвіца та розв’язати
отримані рівняння. У випадку системи
третього порядку (n=3)
критичне
значення параметру знаходять з розв’язку
рівняння
,
при яких система буде знаходитись на
межі області стійкості, можна скористатися
критерієм стійкості Гурвіца. Для цього
необхідно прирівняти до нуля головний
визначник відповідні мінори визначника
Гурвіца та розв’язати
отримані рівняння. У випадку системи
третього порядку (n=3)
критичне
значення параметру знаходять з розв’язку
рівняння

Задача №1. Проаналізувати стійкість САК. Система складається з регулятора інтегральної дії і об’єкта – двох послідовно з’єднаних аперіодичних ланок. Система замкнута.



X


 Y
Y





 =2;
=2;
 ;
; 0,1;
0,1; =0,5c;
=0,5c;
 =0,2c.
=0,2c.
Знайдемо передаточну функцію розімкнутої системи.
 .
.
Передаточна функція замкнутої системи:
 .
Складаємо визначник Гурвіца:
.
Складаємо визначник Гурвіца:
 ;
;

0,7>0;
0,64>0;
0,83>;
 >0;
>0;
Отже система стійка.
Перевіряємо стійкість САК за критерієм Михайлова:
0,1 ;
;
 ;
;
 ;
;
 ;
;
По цим значенням будуємо таблицю.
 U
V
U
V
0 0,6 0
1 -0,1 0,9
2 -2,2 1,2
3 -5,7 2,1
4 -10,6 -2,4
∞ -∞ -∞
Для того щоб дізнатись чи є система стійкою, потрібно по даним цієї таблиці побцдцвати годограф, і пересвідчитись, що він проходить три квадранти.