

Тема 6: Лінійна та квадратична інтегральні оцінки якості
Теоретичні відомості
Під якістю регулювання розуміють набір показників, які характеризують динаміку перехідного процесуі точність в усталеному режимі.
Найпоширенішим способом оцінки якості є спосіб оцінки за перехідними характеристиками системи. Показники якості регулювання, що визначені за перехідними характеристиками називають прямими показниками якості. Крім того існують непрямі показники якості. До них зокрема належать кореневі критерії якості, інтегральні і частотні критерії якості.
Серед прямих критеріїв якості виділяють такі: перерегулювання, час регулювання, коливальність та усталеному помилку (похибку).
Перерегулюванням
називають максимальне відхилення
регульованої величини від її усталеного
значення:

Часом регулювання називають проміжок часу від початку перехідного процесу до моменту, коли регульована величина відрізняється від усталеного значення на величину наперед заданої помилки, яка складає, як правило, 5% від усталеного значення.
Відношення
амплітуди коливань через період під
час перехідного процесу називають
коливальністю:
На практиці коливальність визначається числомповних коливань n визначених на протязі часу регулювання.
Інтегральні оцінки якості дають загальну оцінку швидкості затухання і відхилення регульованої величини за час регулювання. Вони діляться на лінійні і квадратичні. Найпростіша квадратична оцінка є функціоналом від динамічної помилки системи і визначається формулою:

 -
динамічна помилка системи.
-
динамічна помилка системи.
Динамічна
помилка системи є відхиленням регульованої
величини від усталеного значення

Інтегральна оцінка може бути виражена через зображення Лапласа від динамічної помилки системи

Для розрахунку квадратичної оцінки за зображенням динамічної помилки на практиці використовують формулу Релея, або формули отримані Мак-
Леном. Мак-Леном знайдено інтеграли для систем різного порядку, в яких степінь полінома чисельника менший на одиницю за степінь полінома знаменника.
За методом Мак-Лена квадратична інтегральна оцінка для системи третього порядку знаходиться за формулою:

Значення
коефіцієнтів
 і
і беремо з формули для зображення динамічної
помилки:
беремо з формули для зображення динамічної
помилки:
Підставивши значення коефіцієнтів у формулу для інтегральної квадратичною оцінки знаходимо:

Прирівнюючи
першу частину похідної від квадратичної
інтегральної оцінки, до нуля:
 ,
отримуємо вираз для оптимального
значення
,
отримуємо вираз для оптимального
значення ,
що забезпечує мінімум інтегральної
квадратичної оцінки.
,
що забезпечує мінімум інтегральної
квадратичної оцінки.
Задача №1. Розрахувати інтегральну квадратичну оцінку. За допомогою цієї оцінки знайти оптимальний коефіцієнт регулятора.
 ;
;
 -
- ;
;
 ;
;
 ;
;






 ;
;
 ;
;
 .
.
Тема №7: Нелінійні системи автоматичного регулювання. Метод фазового простору (фазової площини)
Теоретичні відомості
Динамічні процеси у нелінійних системах суттєво відрізняються від процесів у лінійних: значно ширше трактується поняття стійкість, в тій самі системі залежно від початкових відхилень можуть спостерігатися якісно різні перехідні процеси тощо. В цілому за своїми властивостями нелінійні системи значно багатші за лінійні.
Стан системи, (тобто значення регульованої величини і швидкість її зміни) задають на фазовій площині точкою. Цю точку наз. Зображуючою.
Якщо б-яка дія виводить систему з усталеного режиму, то зображуюча точка опиняється у довільному місці фазової площини. Під час перехідного процесу змінюється вихідна величина Y та її похідна, тому зображуюча точка рухається у фазовій площині по фазовій траєкторії.
Сукупність фазових траєкторій, що відповідають різним початковим станам системи наз. Фазовим портретом. Фазовий портрет дає повне уявлення про динаміку системи.
Через б-яку точку фазової площини (крім особливих т.) може проходити лише одна фазова траєкторія.
Як
зазначалося раніше, рівняння фазової
траєкторії
 є розв’язком рівняння
є розв’язком рівняння .
Спосіб розв’язування
цього рівняння залежить від типу
характеристики нелінійної ланки.
Загальним методом розв’язування є
чисельне інтегрування за допомогою
ЕОМ. Для кусково-лінйних нелінійних
характеристик у деяких випадках розв’язок
рівняння може бути знайдено аналітично
для окремих лінійних ділянок нелінійної
характеристики. Кожна лінійна ділянка
нелінійної характеристики описується
своїм рівнянням і, отже, буде багато
різних рівнянь фазових траєкторій. При
цьому на фазовому портреті з’являться
так звані лінії перемикання, що розділяють
фазову площину на зони з різними фазовими
траєкторіями.
.
Спосіб розв’язування
цього рівняння залежить від типу
характеристики нелінійної ланки.
Загальним методом розв’язування є
чисельне інтегрування за допомогою
ЕОМ. Для кусково-лінйних нелінійних
характеристик у деяких випадках розв’язок
рівняння може бути знайдено аналітично
для окремих лінійних ділянок нелінійної
характеристики. Кожна лінійна ділянка
нелінійної характеристики описується
своїм рівнянням і, отже, буде багато
різних рівнянь фазових траєкторій. При
цьому на фазовому портреті з’являться
так звані лінії перемикання, що розділяють
фазову площину на зони з різними фазовими
траєкторіями.
Рівняння ліній перемикання визначаються безпосередньо за математичним описанням нелінійної ланки. Якщо на фазовій площині є лінії перемикання, то при розрахунку фазових траєкторій початкові значення x1 і x2 для кожної ділянки визначаються через їх кінцеві значення на попередній ділянці.
Фазові
траєкторії можна побудувати й не
розв’язуючи
рівняння
 якщо скористатися методомізоклін.
Ізокліни (лінії однакового
якщо скористатися методомізоклін.
Ізокліни (лінії однакового
нахилу)
– це лінії, вздовж яких похідна
 має стале значення.
має стале значення.
Задача №1. Розрахувати і побудувати фазовий портрет нелінійної САК.
G
 U
U












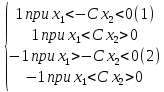
В нашому випадку не лінійність складається з двох відрізків прямих ліній яким відповідають умови (1) і (2).
Запишемо в 1-ій нормальній формі Коші
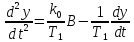
Розділимо перше рівняння на друге:
І проінтегруємо:

Проінтегрувавши, знайдемо x для першого і другого випадків:


Врахувавши вихідні дані маємо:


З
початкових умов знайдемо
 ;
;
 ;
;
Будуємо
табличку
 для
випадку (2)
для
випадку (2)
|
|
|
|
1 |
0 |
|
0,98 |
-0,2 |
|
0,89 |
-0,4 |
|
0,68 |
-0,6 |
|
-1 |
-0,95 |


Коли
 стало рівним (-1) то приймаєм кінцеві
значення
стало рівним (-1) то приймаєм кінцеві
значення та
та
 як
початкові умови для розрахунку
як
початкові умови для розрахунку


Будуємо
табличку
 для
випадку (1) при
для
випадку (1) при

|
|
|
|
-1,15 |
-0,6 |
|
-1,28 |
0 |
|
-1,17 |
0,4 |
|
-0,47 |
0,8 |
|
1 |
0,96 |


Аналогічно
знаходимо

 ;
;
Будуємо
табличку
 для випадку (2) при
для випадку (2) при ;
;
|
|
|
|
1,16 |
0,6 |
|
1,287 |
0 |
|
1,18 |
-0,4 |
|
0,48 |
-0,8 |
|
-1 |
-0,94 |


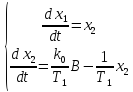
По всіх трьох табличках будуємо графік:
1,5
лінія
переключення
(2)
1
0,5
-1,5
-1 -0,5 0 0,5 1
1,5
-0,5
(1)
1
лінія переключення
1,5
Це і є шуканий фазовий портрет.