

Студентам ИТ / 2 УПП_ИТ / Основн_литература / ИТ (Excel) / ИТ_автоматич_управл
.pdf1.5. Законы регулирования и оценки качества.
Рассмотрим систему автоматического регулирования, изображенную на рис. 1.5.1.
|
e(t) |
|
u(t) |
|||||||
Желаемое |
|
|
|
|
|
|
|
|
|
|
|
Регулятор |
|
|
ТО / ТП |
|
|
|
|||
значение |
|
|
|
|
|
|
||||
|
||||||||||
выхода |
|
|
|
|
|
|
|
|
|
Выход |
|
|
y(t) |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
yэ(t) |
|
|
|
|
|
|
|
|
|
|
Сравнение |
|
|
Измерение |
|
|
|
|
|||
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
Рис. 1.5.1
Функциональная связь между выходной координатой регулятора u(t) (т.е. управляющим воздействием или положением регулирующего органа) и его входной координатой e(t) (т.е. отклонением действительного значения регулируемого параметра от заданного значения) называется законом (алгоритмом) регулирования. При этом рассматривается установившееся движение регулятора (после окончания затухающего переходного процесса, если он существует).
У регуляторов плавного действия эти функциональные зависимости непрерывные и обычно линейные (часто прямая пропорциональность). Они могут включать в себя как сами координаты, так и их интегралы и производные. При этом пользуются следующими основными пятью законами регулирования.
1. По отклонению – управляющее воздействие пропорционально мгновенному значению отклонения (соответствующий регулятор по отклонению, или пропорциональный регулятор, или П-регулятор)
u(t) |
= k e(t) = k [y(t) – yэ(t)], |
(1.5.1) |
||||
|
du |
|
k |
de |
, |
|
|
dt |
dt |
|
|||
|
|
|
|
|||
т.е. управляющее воздействие изменяется синхронно с отклонением (с постоянным коэффициентом k пропорциональности).
Отсюда следует, что при неизменяющемся (постоянном) отклонении регулируемого параметра (e = e 0 = const) регулиру-
31
ющий орган неподвижен, т.е. не стремится устранить это отклонение.
У рассматриваемого регулятора имеется прямая пропорциональность перемещения регулирующегося органа и вызывающегося его отклонение регулируемого параметра. В свою очередь, это отклонение также функционально связано с положением регулирующего органа. Поэтому любое отклонение нагрузки регулируемого объекта от заданного (номинального) значения потребует изменения положения регулирующего органа, т.е. по-
явится u 0 (для компенсации этого возмущения по нагрузке), это в свою очередь в силу (1.5.1) приведет к тому, что и откло-
нение регулируемого параметра 0. Следовательно, при регулировании по отклонению регулятор является статическим (часто называется пропорциональным вследствие пропорциональности его управляющего воздействия отклонению). Коэффициент пропорциональности, представляющий собой коэффициент усиления (передачи) регулятора, иногда называемый его чувствительностью, равен обратной величине статизма (или неравномерности) регулятора k 1/ .
2. По отклонению и производным – управляющее воздей-
ствие пропорционально мгновенному значению не только отклонения, но и производных (первой, второй) отклонения по времени (соответствующий регулятор по отклонению и производной, или пропорционально-дифференциальный, или ПДрегулятор)
|
|
|
|
|
de |
|
|
|
||
u k e |
Т |
Д |
|
|
, или |
(1.5.2) |
||||
|
||||||||||
|
|
|
|
|
dt |
|
|
|
|
|
du |
de |
|
|
|
d2e |
|
||||
|
k |
|
|
T |
|
|
|
. |
|
|
|
|
|
|
|
|
|
||||
dt |
|
|
|
|
Д |
|
dt |
2 |
|
|
dt |
|
|
|
|
|
|
||||
Скорость регулирующего органа зависит не только от скорости изменения отклонения, но и от его второй производной (от ускорения). В том случае, когда отклонение регулируемого параметра еще только формируется (т.е. оно само и скорость его нарастания пока очень малы), но приложенное возмущение значительно, вторая производная отклонения по времени также значительна. Например, немедленно (t = 0) после приложения силы F к неподвижной массе m детали регулятора ее ускорение конечно и равно a = F/m, а скорость v = (at)t=0 и путь s = (at2/2)t=0
32
еще равны нулю. Наоборот, при возникновении отрицательного ускорения начинается замедление нарастания регулируемого параметра. Это обстоятельство сейчас же будет учтено ПДрегулятором (уменьшением скорости регулирующего органа). Включение производной в закон регулирования позволяет регулирующему органу как бы предвидеть изменение регулируемого параметра. Такой регулятор работает, как говорят, с предварением и особенно целесообразен при резких и значительных возмущениях. При e = e0 = const по-прежнему de/dt = 0, т.е. отклонение не устраняется (регулятор статический).
Как и в предыдущем случае П-регулятора, коэффициент k безразмерен и равен обратной величине статизма (неравномерности) регулятора. Коэффициент Tд, как это видно из (1.5.2), имеет размерность времени и называется постоянной дифферен-
цирования, или временем предварения.
3. По интегралу – управляющее воздействие пропорционально величине интеграла отклонения по времени (регулятор по интегралу, или интегральный регулятор, или И-регулятор)
u(t) |
1 |
t e( ) d или |
(1.5.3) |
|
|||
|
TИ |
|
|
|
|
|
|
du / dt 1/TИ e .
Скорость регулирующего органа прямо пропорциональна отклонению регулируемого параметра. Очевидно, что регулирующий орган не может остановиться (при отсутствии зоны нечувствительности), пока имеется отклонение регулируемого параметра. Единственным достаточным и необходимым условием равновесия регулирующего органа является отсутствие отклонения регулируемого параметра лишь при e = 0 (значение du/dt = 0
и u = const).
Иначе говоря, при регулировании по интегралу регулятор
стремится устранить (при t ∞) отклонение без статической ошибки (регулятор астатический).
Коэффициент TИ, как это нетрудно видеть из уравнения (I.5.3), имеет размерность времени и называется постоянной интегрирования регулятора.
4. По отклонению и интегралу – управляющее воздействие пропорционально величине не только отклонения, но и его инте-
33
грала по времени (регулятор по отклонению и интегралу, или пропорционально-интегральный регулятор, или ПИ-регулятор)
|
|
|
|
1 |
|
t |
|
|
|||
|
|
|
|
|
|
|
|
|
|||
u(t) k e(t) |
|
TИ |
|
e( ) d или |
(1.5.4) |
||||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||
du |
|
|
|
|
|
|
|
|
|
||
k |
de |
|
|
1 |
e . |
|
|
||||
|
|
|
|
|
|||||||
dt |
|
|
TИ |
|
|
|
|
||||
dt |
|
|
|
|
|
||||||
Здесь скорость регулирующего органа суммируется из двух слагаемых: одного, пропорционального скорости изменения отклонения регулируемого параметра, и другого, пропорционального самому отклонению. Единственным необходимым и достаточным условиям равновесия регулирующего органа (т.е. du/dt = 0) является отсутствие отклонения регулируемого параметра (только когда e = 0 и de/dt = 0).
Следовательно, и в этом случае нет статической ошибки регулирования, и регулятор является астатическим изодромным (благодаря включению в закон регулирования самого отклонения).
В (1.5.4) коэффициент k – безразмерный, а TИ имеет размерность времени и называется временем изодрома регулятора (или постоянной интегрирования).
5. По отклонению, интегралу и производным – управляю-
щее воздействие пропорционально величине отклонения, его интеграла и производных по времени (регулятор по отклонению, интегралу и производной или пропорционально-интегральный с производной, или пропорционально-интегральный дифференцирующий, или ПИД-регулятор)
|
|
|
|
|
|
|
de |
|
|
1 t |
|
|
|
|
|||||
u(t) k e(t) T |
|
|
|
|
|
|
|
|
|
|
|
e( ) d |
или |
(1.5.5) |
|||||
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
Д |
|
dt |
|
Т |
И |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
du |
de |
|
|
d2e |
|
|
1 |
|
|
|
|
|
|
|
|
||||
|
|
|
Т |
Д |
|
|
|
|
|
|
|
|
e(t) . |
|
|
||||
|
|
|
2 |
|
|
|
|
|
|
||||||||||
dt |
|
|
dt |
|
|
ТИ |
|
|
|
|
|
|
|||||||
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Равновесие регулирующего органа наступит также лишь при e = 0, что связано с наличием в законе регулирования интеграла отклонения. В то же время наличие в этом законе производной отклонения создает работу регулятора с предварением. В
34
итоге получается астатический изодромный регулятор с предварением.
Таким образом, включение интеграла в закон регулирования всегда приводит к исключению статической ошибки регулирования (т.е. к астатичности регулятора), а включение в этот закон производной позволяет регулятору работать с предварением. В (I.5.5) участвуют все три коэффициента: k – безразмерный коэффициент усиления регулятора, с размерностью времени ТД и
ТИ.
Для релейных регуляторов нет непрерывной функциональной зависимости u(e), для них чаще всего применяются рассмотренные далее два закона регулирования.
Для релейного двухпозиционного регулятора (Рпрегулятора), у которого управляющее воздействие может иметь лишь два дискретных значения u0,
u u0 |
sign e при de / dt 0; |
(1.5.6) |
|
u u |
sign e при de / dt 0, |
||
|
|||
0 |
|
|
где – половина зоны неоднозначности регулятора; sign означает знак выражения в скобках.
Зоной неоднозначности называется диапазон изменения входной координаты. Они зависят от направления изменения входной координаты и предшествующего состояния звена, системы и пр. Возникновение неоднозначности связано чаще всего с гистерезисом, наличием люфтов и т.п. Иначе говоря, при возрастании во времени отклонения e регулируемого параметра регулирующий орган срабатывает скачком (сменяет позицию): при e = + значение –u0 сменяется значением +u0, а при обратном ходе e (его снижении) регулятор срабатывает при e = – .
У релейного регулятора постоянной скорости (Рсрегулятора)
du / dt 1/ТС sign(e) при | e | ; |
(1.5.7) |
|
du / dt 0 при | e | , |
|
|
|
|
|
т.е. регулирующий орган перемещается с постоянной скоростью, равной 1/TС, в одном или другом направлении, когда отклонение регулируемого параметра выходит в ту или иную сторону за зону нечувствительности. В ее пределах регулирующий орган находится в покое. Например, при срабатывании регулятора
35
контактная система включает реверсивный электродвигатель регулирующего органа.
Закон регулирования является важнейшей характеристикой регулятора, но не всегда описывает его поведение в динамике полностью, поскольку в левых частях уравнений этого закона фигурирует лишь одна величина – выходная координата. Во многих случаях при изменении выходной координаты нужно учитывать не одну, а две и больше величин (например, инерционные явления в регуляторе, т.е. перемещение и его скорость; перемещение, скорость и ускорение; скорость и ускорение и т.п.). Поэтому регулятор, поведение которого описывается уравнением закона регулирования, где участвует лишь одна величина, характеризующая выходную координату регулятора (без ее производных), называется идеальным. Иначе говоря, у идеального регулятора (как динамической системы) все постоянные времени в левой части уравнения динамики принимаются равным нулю (см. 1.5.4).
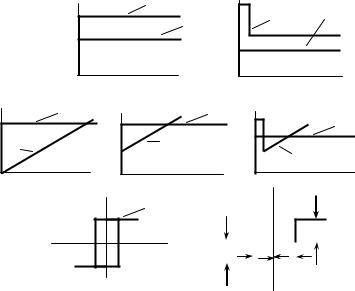
На рис. I.5.1 показаны графики координат e и u для различных идеальных законов регулирования при образовании в момент t = 0 скачкообразного отклонения регулируемой величины из-за изменения нагрузки.
e, u |
u |
|
e
t
u |
e |
e |
|
e |
|
|
e |
u |
|
u |
|
|
u |
|
e |
de/dt |
|
|
|
|
|
1/Тс |
u |
-1/Тс |
|
u |
||
|
|
|
|
|
|
Рис. 1.5.1
36
УП-регулятора выходная координата повторяет входную (в соответствующем масштабе).
УПД-регулятора координата u складывается из двух: одна повторяет входную координату (в соответствующем масштабе),
авторая пропорциональна производной e, т.е. в рассматриваемом случае (скачкообразное изменение e) в момент t = 0 координата u стремится к бесконечности, а ее длительность стремится к нулю. Следовательно, в момент образования (или увеличения) отклонения появляется дополнительное перемещение выходной координаты регулятора.
УИ-регулятора при e = const, очевидно, выходная координата возрастает линейно (интеграл постоянной величины с угло-
вым коэффициентом ТИ1 ). Площадь, ограниченная прямой e =
const и концевыми ординатами t = 0 и t = var, больше, естественно, площади под наклонной u(t) с теми же концевыми ординатами для моментов времени до пересечения прямых e(t) и u(t). Но
эти площади пропорциональны интегралам e dt и u dt , т.е.
количествам энергии или вещества, аккумулированным в регулируемом объекте и удаленным из него. Поэтому при компенсации регулятором разбаланса потоков из-за возмущения при нагрузке, аккумулированное в объекте количество энергии или вещества ниже заданного (например, действительное теплосодержание ниже предписанного, определяемого по номинальному значению регулируемой температуры). Поэтому происходит дальнейшее возрастание выходной координаты регулятора и неизбежно наступает перерегулирование с последующим колебательным процессом изменения регулируемого параметра.
УПИ-регулятора для координаты u к наклонной прямой интеграла постоянной величины добавляется еще горизонтальная постоянная величина, пропорциональная уровню отклонения e = const. Поэтому по сравнению с графиком u(t) для И- регулятора в данном случае такая же наклонная прямая поднимается выше и при t = 0 выходит не из начала координат. Разность площадей под прямыми e(t) и u(t) до момента их пересечения меньше, чем у И-регулятора; величина перерегулирования также будет ниже и т.д.
УПИД-регулятора в отличие от ПИ-регулятора появляется дополнительный импульс при t = 0, как это показано ранее для ПД-регулятора.
37
УРп-регулятора зона неоднозначности ограничена петлей кусочно-линейной функции u(e).
УРс-регулятора выходная координата – скорость регулируемого органа – не зависит о направления изменения входного сигнала e и однозначно (кусочно-линейно) функционально связана со значением e.
Качество регулирования.
Оценка качества регулирования – это численный показатель или критерий качества системы регулирования, который выбирается так, чтобы подчеркнуть наиболее важное требование, предъявляемое к системе.
Система считается оптимальной системой управления,
если ее параметры выбраны таким образом, что оценка качества принимает экстремальное (обычно минимальное) значение.
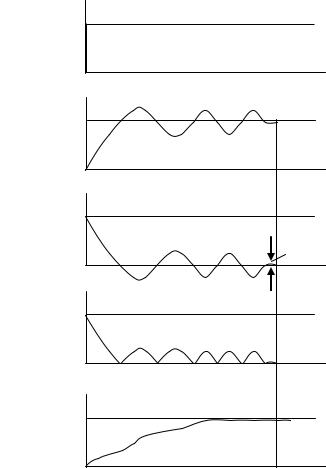
Одним из самых распространенных оценок качества может служить интеграл квадрата ошибка (ИКО)
ИКО = T e2 (t) dt . |
(1.5.8) |
0 |
|
Верхний предел интегрирования T в (1.5.8) выбирается обычно в виде некоторого эффективного времени Tэф установления переходного процесса в виде реакции y(t) системы управления с обратной связью на ступенчатое входное воздействие
(функцию Хевисайда) x(t) = (t), как показанное на рис. 1.5.2. Другой распространенной для переходных процессов в за-
мкнутых системах управления оценкой качества является уста-
новившаяся ошибка e системы.
Для идеальной (без помех) замкнутой системы автоматического регулирования, содержащей объект с передаточной функцией G и цепь обратной отрицательной связи с передаточной функцией R, ошибка равна
E(s) |
|
1 |
X (s) . |
(1.5.9) |
|
|
|||
|
G(s)R(s) |
|||
1 |
|
|
||
Следовательно, установившаяся ошибка для X(s) = 1/s рав-
на
e lim |
e(t) lim sE(s) lim |
1 |
. |
(1.5.10) |
||
|
||||||
1 G(s)R(s) |
||||||
t |
s 0 |
s 0 |
|
|
||
Забегая вперед отметим, что для ПИД-регуляторов в отсутствии шумов теоретическое значение e 0 (см. стр. 42).
38
x(t) = (t)
0 |
t |
y(t)
0 |
t |
e(t)
e
0 |
t |
e2(t)
0 |
t |
0t e2 ( ) d
0 |
Tэф |
t |
Рис. 1.5.2
39
1.6. Робастные системы управления.
Рассмотренные выше методы анализа и синтеза систем автоматического управления предполагали, что модели объекта и регулятора известны, и они имеют постоянные параметры. Однако модели реальной физической системы (ТО, ТП) и самого регулятора всегда будут неопределенными (неточными) по следующим причинам:
-неконтролируемое изменение параметров;
-непредсказуемые внешние возмущения;
-шумы датчиков;
-динамические свойства, не учтенные в моделях;
-не учтенные запаздывания по времени;
-изменение положения рабочих точек системы. Рассмотрим влияние на системы управления лишь некото-
рых причин.
Чувствительность систем управления к изменению параметров.
Рассмотрим случай, когда за счет изменения параметров объекта управления его передаточная функция приняла значение G(s) + G(s). Тогда приращение передаточной функции замкнутой системы в соответствии с (1.3.28) примет вид (G >> G 0)
П(s) |
|
G(s) |
|
G(s) |
1 |
|
П(s) . (1.6.1) |
|
|
|
|
|
|||
|
G(s)R(s)]2 |
G(s) [1 G(s)R(s)] |
|||||
[1 |
|
|
|||||
Чувствительность системы определяется как отношение процентного изменения передаточной функции системы к процентному изменению передаточной функции объекта. Из (1.6.1) следует, что чувствительность системы равна
Ч (s) |
1 |
. |
(1.6.2) |
|
|
||||
[1 G(s)R(s)] |
||||
|
|
Отсюда видно, что чувствительность замкнутой системы можно сделать меньше, чем ее чувствительность в разомкнутом состоянии (Ч = 1) путем увеличения коэффициента усиления обратной связи (R).
Возмущение и шумы датчиков систем управления.
Возмущение – это нежелательный входной сигнал, который оказывает влияние на выходной сигнал системы. Одновременно внутри системы могут присутствовать шумы. На рис.
40