

Студентам ИТ / 2 УПП_ИТ / Основн_литература / ИТ (Excel) / ИТ_автоматич_управл
.pdfСловарь основных понятий и сокращений
X(s) – образ Лапласа входного сигнала x(t) линейной системы. Y(s) – образ Лапласа выходного сигнала y(t) линейной системы. E(s) – образ Лапласа ошибки регулирования, E(s) = X(s) – Y(s). G(s) – передаточная функция разомкнутой линейной системы
(объекта управления), G(s) = Y(s) / X(s) . R(s) – передаточная функция цепи обратной связи.
П(s) – передаточная функция замкнутой линейной системы,
П(s) = G(s) /[1 + R(s) G(s)] .
(t) – ступенчатая функция Хевисайда,
(t) = 0 для t < 0 и (t) = 1 для t 0.(t) – импульсная функция Дирака,
(t) = для t = 0 и (t) = 0 для t 0.
G(j ) – частотная характеристика линейной системы,
G(j ) = G(s = j ).
|
f (k t)z k . |
F(z) – z-образ функции f(t), F(z) |
|
k 0 |
|
81
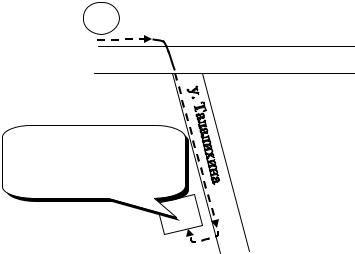
Метро «Волгоградский проспект»
М(последний вагон из центра)
Волгоградский проспект
Адрес УВЦ кафедры:
Москва, ул. Талалихина 31, комната:
50 (4 этаж)
Телефоны кафедры Информационных технологий МГУТУ им. К.Г. Разумовского
(факс) 8(495) 670-66-00; 8(495) 678-25-34; Email – kit2202@yandex.ru
Сайт кафедры – kafedrait.com
______________________________________________________
Краснов Андрей Евгеньевич, Красников Степан Альбертович, Чернов Евгений Александрович
Информационные технологии автоматического управления Учебно-практическое пособие
Тираж: _____ экз., заказ № ____
82