

Студентам ИТ / 2 УПП_ИТ / Основн_литература / ИТ (Excel) / ИТ_автоматич_управл
.pdfВопросы для самопроверки к главе 2.
1.Каково назначение ЦАП и АЦП в цифровых системах управления? Изобразите функциональную схему одноконтурной цифровой системы управления.
2.Что такое квантователь или ключ? Какое функциональное преобразование он осуществляет?
3.Как работает ЦАП? Изобразите функциональную схему ключа и фиксатора (экстраполятора нулевого уровня). Чему равна передаточная функция экстраполятора?
4.Как выражается z-преобразование сигнала?
5.Как построить z-преобразование передаточной функции разомкнутой дискретной системы?
6.Как определить отклик дискретной системы на единичный импульсный входной сигнал, на единичный ступенчатый входной сигнал?
7.Как определить устойчивость линейной непрерывной системы с обратной связью по ее непрерывной передаточной функции П(s)?
8.Как определить устойчивость линейной непрерывной системы с обратной связью по ее дискретной передаточной функции П(z)?
9.В чем принципиальная разница по устойчивости между дискретной и непрерывной системами второго порядка?
10.Как получить дискретную аппроксимацию цифрового регулятора?
11.Как получить уравнение непрерывной динамической системы в переменных ее состояния?
12.Как описывается в общем случае состояние линейной динамической системы в переменных ее состояния? Приведите векторное описание.
13.Приведите общий вид решения уравнения состояния.
14.Как определяется фундаментальная или переходная матрица состояния?
15.Выпишите вид линейного и нелинейного уравнений состояний в дискретно-разностной форме.
16.Объясните смысл и СКО метод идентификации дискретных моделей линейных систем.
17.Как провести оценку устойчивости дискретноразностной модели линейной системы.
18.Приведите функциональную схему системы контроля качества жидких сред по оптическому светорассеянию.
71
19.Приведите примеры корреляционных мер сходства. Чем они отличаются?
20.В чем заключаются методы спектральной компьютерной квалиметрии?
21.Какие методы получения спектральных данных Вы знаете?
22.Что лежит в основе теории спектрального анализа?
23.Почему спектры многокомпонентных веществ, находящихся в конденсированном состоянии носят нечеткий размытый характер?
24.Какие две проблемы спектральной компьютерной квалиметрии Вы знаете?
25.Объясните смысл построения экспертных правил в компьютерной квалиметрии.
Тренировочные задания
1.По аналогии с рис. 1.1.6 нарисуйте блок-схему системы управления температурным режимом водяного котла, учитывая, что необходимо также управлять давлением пара.
2.Покажите, что передаточная функция усилительного звена, связывающего входную величину x и выходную величину y уравнением y = k x, где k – коэффициент усиления, равна
G(s) = k.
3. Покажите, что передаточная функция интегрирующего звена, у которого скорость изменения выходной величины пропорциональна входной величине, т.е. dy /dt = k x, где k – коэффициент усиления, равна
G(s) = k / s.
Изобразите график переходной функции интегрирующего звена, т.е. реакцию на единичную ступенчатую функцию Хеви-
сайда (t).
4. Воспользовавшись табл. 1.3.1, покажите, что передаточная функция апериодического звена, описываемого дифференциальным уравнением T dy /dt + y = k x, где T – постоянная времени апериодического звена (T > 0), а k – коэффициент его усиления, равна
G(s) = 1 / (Ts + 1).
Покажите, что переходная функция апериодического звена
равна
y(t) = k [1– exp(– t / T)].
72
5. Воспользовавшись табл. 1.3.1, покажите, что передаточная функция колебательного звена, описываемого дифференциальным уравнением W d2 y /d2 t + T dy /dt + y = k x, где (W > 0, T > 0), равна
G(s) = k / (Ws2 + Ts + 1).
Опираясь на выражение (1.6.10) примера 1.6.1 (стр. 43) изобразите графики всех возможных переходных функций колебательного звена.
6. Покажите, что передаточная функция реального дифференцирующее звено, описываемого дифференциальным уравнением T dy /dt + y = k dx /dt, где (T 0), равна
G(s) = k s / (Ts + 1).
Опираясь на задание 4 покажите, что переходная функция реального дифференцирующего звена равна
y(t) = (k / T) exp(– t / T).
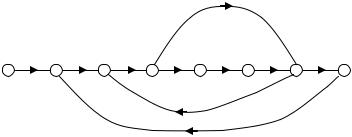
7. Опираясь на формулу Мейсона (1.4.4) и пример 1.4.2 (стр. 30) найдите передаточную функцию сложной системы, описываемой изображенным ниже сигнальным графом.
|
|
|
|
G7 |
|
|
1 |
G1 |
G2 |
G3 |
G4 |
G5 |
G6 |
X(s) |
|
|
|
|
|
Y(s) |
-R1 -R2
8. Используя условие устойчивости Рауса-Гурвица
B C – A D > 0
для линейной системы третьего порядка
A y''' (t) + B y'' (t) + C y'(t) + D y(t) = x(t)
покажите, что предельное значение коэффициента усиления k = = k1 k2 k3 для системы, изображенной ниже на рисунке, имеет значение
73

kПР = 2 + T1/T2 + T1/T3 + T2/T1 + T2/T3 + T3/T1 + T3/T2 .
+ |
|
|
k1 |
|
|
|
k2 |
|
|
|
k3 |
|
|
Y(s) |
X(s) |
|
|
|
|
|
|
||||||||
|
T1s 1 |
|
|
T2 s 1 |
|
|
T3s 1 |
|
|
|||||
- |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8. Используя схему предыдущего задания, покажите, что установившаяся погрешность системы равна
E(s) = X(s) – Y(s) = X(s) / (1 + k) = X(s) STAT,
где STAT = 1/ (1 + k) – коэффициент статизма.
9.Рассчитайте чему равна установившаяся ошибка e
(1.6.7, стр. 42), если N(s) = N0/s.
10.Используя правило деления дробей из примера 2.1.2 (см. стр. 52), найдите четыре первых отклика y(0), y(1), y(2) и y(3) выхода дискретной системы на входной импульсный сигнал, если z-образ передаточной функции системы имеет вид
|
z 1 |
|
G(z) = |
|
. |
z 2 z 1 |
||
11.Используя пример 2.2.1 (см. стр. 54), выясните – устойчива ли замкнутая дискретная система с передаточной функцией G(z) предыдущего задания?
12.Найдите решение рекуррентного уравнения (2.4.16) для k = 0, 1, 2, 3, если
x(0) = |
1 |
, A = |
1 |
1 |
, B 0. |
|
|
|
|||
|
0 |
|
1 |
1 |
|
13. Используя условия (2.5.9, стр. 63), проверьте устойчи-
вость дискретно-разностной модели yn = a1 yn-1 + a2 yn-2 + a3 yn-3 при следующих значениях ее параметров
a1 = 1; a2 = 0,5; a3 = – 0,7.
14.Выпишите явный вид корреляционных мер сходства (2.6.2 2.6.4, стр. 65), используя знак . Чему равны корреляционных мер сходства при n* = = const?
15.Выпишите явный вид модели регрессионной зависимо-
сти (2.6.6, стр. 70) для [X, Sm] = exp[– (X – Sm)TFTF (X – Sm)].
74
Тесты по темам модуля
(выбрать правильный ответ/ответы из 3-х предлагаемых)
1.Системой регулирования называется:
1.1система управления, регулирующая значение выхода;
1.2система автоматического управления, поддерживающая желаемое значение выходного сигнала;
1.3система управления, поддерживающая желаемое значение входного сигнала.
2.Принцип обратной связи заключается в том, что:
2.1.в замкнутой системе производится измерение выходной переменной и его результат в виде сигнала обратной связи сравнивается с эталонным входным сигналом, несущим информацию о заданном значении выходной переменной;
2.2.в системе производится измерение выходной переменной и его результат сравнивается с эталонным входным сигналом;
2.3.в системе производится измерение выходной переменной и по результатам сравнивается вырабатывается сигнал обратной связи.
3.Замкнутая система регулирования стремится:
3.1.поддержать заданное соотношение между двумя переменными путем сравнения функций от этих переменных и использования их разности в качестве управляющего сигнала. Чаще всего разность между заданным значением выходной переменной и ее действительным значением усиливается и используется для воздействия на объект управления, в результате чего эта разность постоянно уменьшается;
3.2.поддержать разность между заданным значением выходной переменной и ее действительным значением;
3.3.усилить разность между заданным значением выходной переменной и ее действительным значением и использовать для воздействия на объект управления, в результате чего уменьшить эту разность.
4.Проектирование систем управления состоит из:
4.1.пяти этапов;
4.2.семи этапов;
4.3.семи этапов и цикла обратной связи.
75
5.Принцип подобия заключается в:
5.1.применении дифференциальных уравнений к физическим системам;
5.2.описании однотипными дифференциальными уравнениями динамики многих непрерывных систем различной физической природы;
5.3.описании подобными дифференциальными уравнениями систем различной физической природы.
6.Дискретными физическими системами называются системы:
6.1.описываемые дифференциальными уравнениями;
6.2.описываемые алгебраическими уравнениями;
6.3.конечно-разностными уравнениями.
7.Линейная система удовлетворяет свойствам:
7.1.масштабируемости;
7.2.суперпозиции;
7.3.суперпозиции и гомогенности.
8.Переменную s в преобразовании Лапласа можно рассматривать как:
8.1.алгебраический оператор;
8.2.оператор дифференцирования;
8.3.оператор интегрирования.
9.Оператор 1/s в преобразовании Лапласа соответствует:
9.1.оператору деления;
9.2.оператору дифференцирования;
9.3.оператору интегрирования.
10.Передаточная функция линейной системы – это:
10.1.отношение преобразования Лапласа выходной переменной
кпреобразованию Лапласа входной переменной при условии, что все начальные значения равны нулю;
10.2.отношение преобразования Лапласа выходной переменной
кпреобразованию Лапласа входной переменной;
10.3.преобразование Лапласа отношения выходной переменной
квходной переменной при условии, что все начальные значения равны нулю.
11.Характеристическое уравнение замкнутой системы с передаточной функцией объекта G(s) и передаточной функцией обратной связи R(s) – это:
76
11.1.1+ G(s) = 0;
11.2.1+ G(s) R(s) = 0;
11.3.G(s) R(s) = 0.
12.Передаточная функция замкнутой системы с передаточной функцией объекта G(s) и передаточной функцией обратной связи R(s) определяется как:
12.1.1/R(s);
12.2.G(s) / [1 + G(s) R(s)];
12.3.1 + G(s) R(s).
13.Сигнальный граф – это:
13.1.диаграмма, состоящая из узлов и отдельных направленных ветвей;
13.2.диаграмма, состоящая из узлов, соединенных между собой отдельными направленными ветвями;
13.3.диаграмма, состоящая из узлов, соединенных между собой ветвями.
13. Путь – это:
13.1. ветвь или последовательность ветвей, которые могут быть проведены от одного узла к другому;
13.2. последовательность ветвей, которые могут быть проведены от одного узла к другому;
13.3. ветвь, проведенная от одного узла к другому. 14. Контур – это:
14.1.замкнутый путь, который начинается и заканчивается в одном и том же узле;
14.2.замкнутый путь, начинающийся и заканчивающийся в узле;
14.3.замкнутый путь, который начинается и заканчивается в одном и том же узле, причем, вдоль этого пути ни один другой узел не встречается дважды.
15.Система считается оптимальной системой управления, если:
15.1.ее параметры выбраны таким образом, что оценка качества принимает экстремальное значение;
15.2.ее параметры выбраны таким образом, что оценка качества принимает минимальное значение;
15.3.ее параметры выбраны таким образом, что принимают экстремальное (обычно минимальное) значение.
77
16.ПИД-регуляторы особенно полезны для:
16.1.уменьшений установившейся ошибки и улучшения вида переходной характеристики, когда объект управления может быть аппроксимирован моделью второго порядка;
16.2.уменьшений установившейся ошибки и улучшения вида переходной характеристики;
16.3.уменьшений установившейся ошибки, когда объект управления может быть аппроксимирован моделью второго порядка.
17.Линейная непрерывная система с обратной связью устойчива, если:
17.1.все полюсы ее передаточной функции П(s) расположены в правой половине s-плоскости;
17.2.все полюсы ее передаточной функции П(s) расположены в левой половине s-плоскости;
17.3.все полюсы ее передаточной функции П(s) расположены в верхней половине s-плоскости.
18.Замкнутая дискретная система устойчива, если:
18.1.все полюсы ее передаточной функции П(z) расположены на z-плоскости вне единичной окружности;
18.2.все полюсы ее передаточной функции П(z) расположены на z-плоскости на единичной окружности;;
18.3.все полюсы ее передаточной функции П(z) расположены на z-плоскости внутри единичной окружности.
19.Элемент mk(t) фундаментальной или переходной матрицы состояний представляет собой:
19.1.реакцию m-ой переменной состояния на начальное значение k-ой переменной состояния;
19.2.реакцию переменной состояния на начальное значение переменной состояния;
19.3.реакцию m-ой переменной состояния на начальное значение k-ой переменной состояния при условии, что начальные значения всех остальных переменных состояния равны нулю.
19.Спектральная компьютерная квалиметрия основана на:
19.1.использовании инструментальных средств оперативного контроля разнообразных физико-химических, оптических, реологических и биологических характеристик пищевых
78
сред совместно с компьютерными экспертными системами;
19.2.связывании с помощью компьютерных экспертных систем спектров (совокупностей) получаемых инструментальных характеристик исследуемых веществ с их соответствующими органолептическими признаками и другими характеристиками, оцениваемыми или инструментально измеряемыми опытными экспертами;
19.3.оценивание или инструментальное измерение разнообразных физико-химических, оптических, реологических и биологических характеристик пищевых сред.
79
Список рекомендованной литературы
Основная
1. Краснов А.Е., Красников С.А., Сагинов Ю.Л., Чернов Е.А., Дишель Ю.Г., Феоктистова Н.А. Информационные технологии автоматизированного
управленния. Учебно-практическое пособие для обучения аспирантов, магистров, студентов и бакалавров технических специальностей.
- М.: МГУТУ им. К.Г. Разумовского, 2014. - 76 с
Дополнительная
1.Филлипс Ч., Харбор Р. Системы управления с обратной связью. Пер. с англ. – М.: Лаборатория базовых знаний,
2001. - 616 с.
2.Дорф Р., Бишоп Р. Современные системы управления. Пер. с англ. – М.: Лаборатория базовых знаний, 2002.
- 832 с.
80