

Слайд 2 Трёхфазный асинхронный двигатель с короткозамкнутым ротором
Принцип действия асинхронных двигателей основан на двух явлениях: образовании рабочего вращающегося магнитного поля токами в обмотке статора и воздействии этого поля на токи, индуцированные в короткозамкнутых витках ротора.
АД относится к электромашинам переменного тока и служит для взаимного преобразования электроэнергии переменного тока в механическую энергию и наоборот.
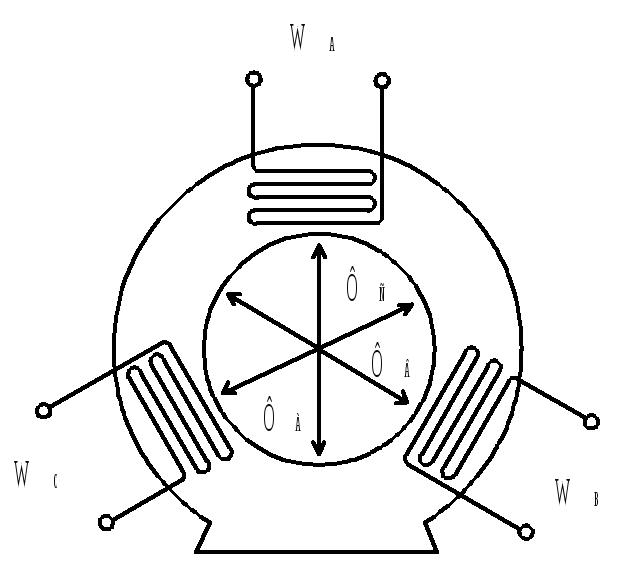
АД состоит из статора (собран из тонких листов электротехнической стали, изолированных друг от друга с целью понижения потерь мощности на гистерезис и вихревые токи), предназначенного для создания вращающего магнитного поля и ротора, вращающегося в магнитном поле. В статоре симметрично (в пазах сердечника статора уложена трёхфазная обмотка, состоящая из 3х отдельных обмоток) по окружности расположены три обмотки WA WB WC, соединенные в треугольник или звезду. При подключении трёхфазного напряжения, каждая из обмоток создаёт синусоидальный поток ФА ФВ ФС, которые смещены друг относительно друга на 120º. В каждый момент времени суммарный поток имеет одну и ту же величину, но меняет направление с постоянной скоростью вращения.
Слайд 3
Условия образования одной волны результирующего трех- и двухфазными обмотками аналогичны. Для трехфазных обмоток это следующие условия:
смещение катушек разных фаз на

сдвиг токов по фазе на
равенство действующих фазных МДС
Слайд 4
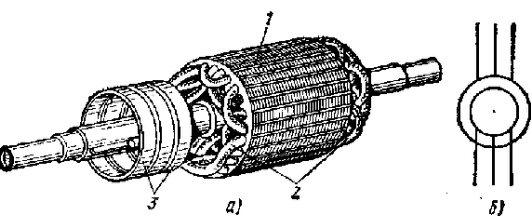
Устройство асинхронного двигателя
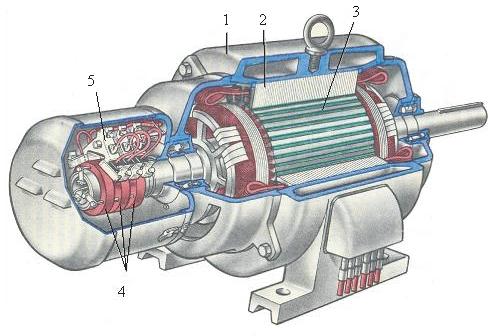
Асинхронный двигатель состоит из статора, ротора и подшипниковых щитов . Статор – неподвижная часть двигателя – имеет цилиндрическую форму. Он состоит из корпуса 1, сердечника 2 и обмотки 3. Корпус литой стальной или чугунный. Магнитопровод статора собирается из тонких листов электротехнической стали. На внутренней поверхности он имеет пазы, в которые укладывается обмотка статора. Ротор асинхронного двигателя – вращающаяся часть – состоит из стального вала 4, магнитопровода 5, набранного из листов электротехнической стали с выштампованными пазами. Обмотка ротора бывает короткозамкнутой или фазной. Короткозамкнутая обмотка выполняется из алюминиевых или медных стержней, замкнутых с обоих торцов ротора накоротко. Фазный ротор имеет трехфазную обмотку, соединенную в звезду. Выводы обмотки подсоединены к кольцам на валу и с помощью щеток подсоединяются к реостату или другому устройству. Вращающийся ротор размещают на общем валу cо статором. Вал вращается в подшипниковых щитах. Соединение обмотки статора осуществляется в коробке, в которую выведены начала фаз С1, С2, С3 и концы фаз С4, С5, С6. На рис показаны схема расположения этих выводов (а) и способы соединения их между собой при соединении фазных обмоток звездой (б) и треугольником (в).
Если в паспорте двигателя указаны два напряжения, например, 380/220, то большему напряжению соответствует соединение звездой, более меньшему – треугольником. В обоих случаях напряжение на фазе двигателя равно 220 В.
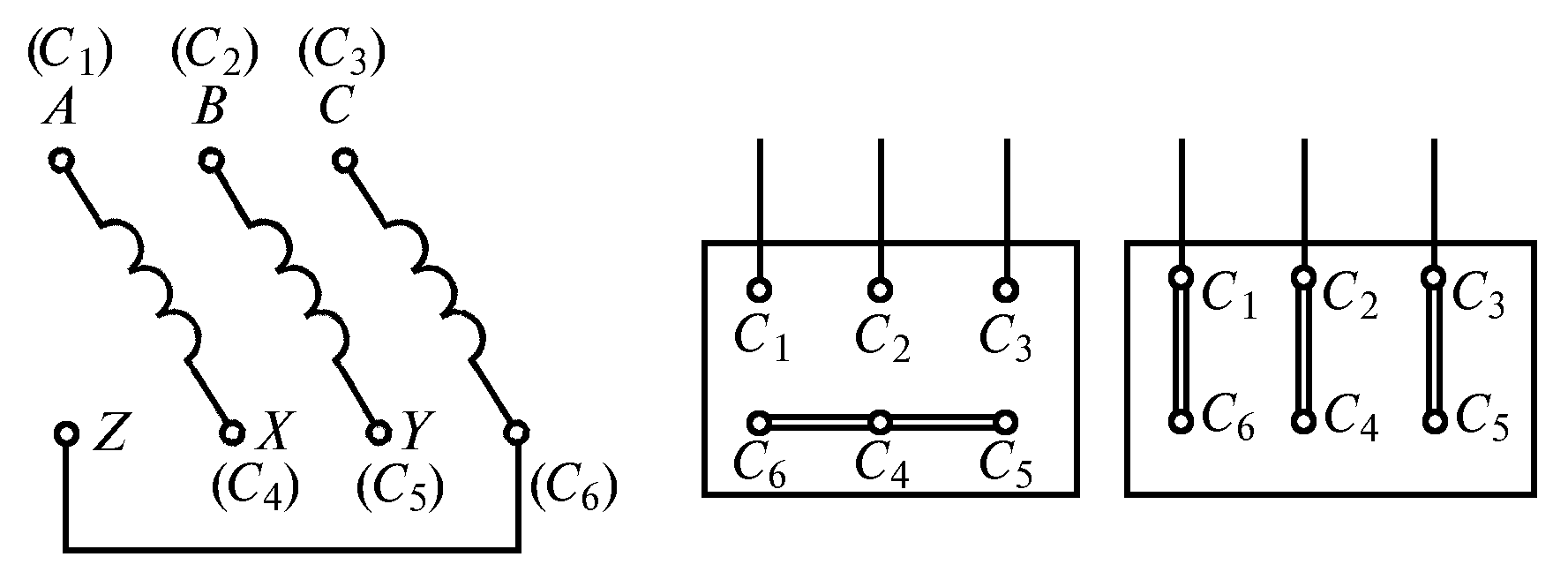
а) б) в)
Слайд 5
Принцип действия асинхронного двигателя
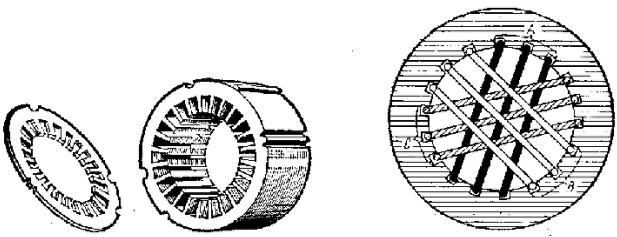
Статор машины собирают, как и у трансформатора, из штампованных листов электротехнической стали. По внутренней кромке листов вырублены пазы, которые создают в статоре каналы для укладки проводников обмотки.
Пакет листов статора запрессован в корпус-оболочку, который имеет соединительные элементы (лапы, торцовый фланец и т. д.) для крепления к неподвижному жесткому основанию. Обмотку статора выполняют в виде одно- или многовитковых катушек, имеющих, как правило, одинаковые размеры. Каждая фаза статорной обмотки состоит из нескольких последовательно включенных катушек
Слайд 6
Короткозамкнутую обмотку типа «беличье колесо» изготовляют, заливая в пазы ротора алюминий. Стержни обмотки, имеющие удлиненную форму, замкнуты торцовыми кольцами, которые отливаются одновременно со стержнями. Кроме того, алюминиевая отливка имеет лопасти, обеспечивающие вентиляцию машины.
Слайд 7
У двигателя с контактными кольцами к обмотке ротора присоединяют посредством щеток трехфазный реостат с целью улучшения пусковых характеристик машины. После окончания пуска кольца замыкают накоротко. Трехфазную обмотку выполняют из изолированного провода, а кольца изолируют от вала двигателя. Трехфазная обмотка ротора соединяется по схеме звезда.
Слайд 8
Скольжение в асинхронном двигателе
Трехфазная обмотка статора создает магнитное поле, вращающееся со скоростью
![]() .
.
Электромагнитное взаимодействие между статором и ротором возникает только при неравенстве скорости поля статора и скорости вращения ротора.
Отношение
![]() (11.4)
(11.4)
называется скольжением асинхронной машины.
n – частота вращения ротора n1 – частота вращения магнитного поля (синхронная частота), p – число пар полюсов.
В зависимости от
соотношения
![]() и
и![]() различают три режима работы: в режиме
двигателя; в режиме генератора; в
режиме электромагнитного тормоза.
различают три режима работы: в режиме
двигателя; в режиме генератора; в
режиме электромагнитного тормоза.
Слайд 9
Режимы работы асинхронного двигателя.
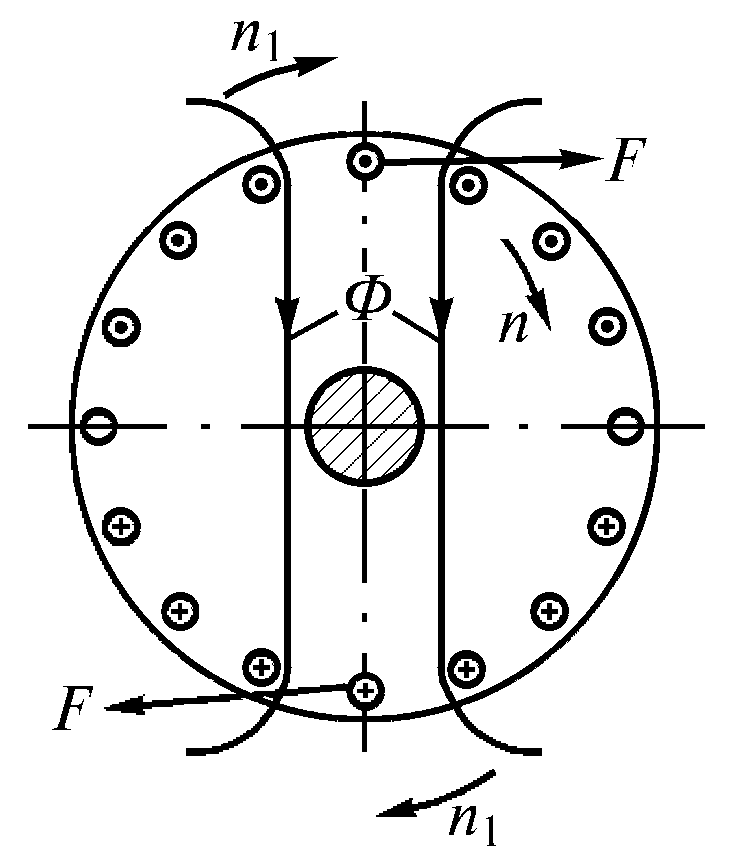
Режим двигателя
На рисунке на
предыдущем слайде показано магнитное
поле статора, вращающееся по часовой
стрелке. При
![]() линии поля статора перемещаются
относительно ротора также по часовой
стрелке со скоростью
линии поля статора перемещаются
относительно ротора также по часовой
стрелке со скоростью![]() .
Согласно правилу правой руки ЭДС в
проводниках ротора под северным полюсом
направлены к нам, в проводниках под
южным полюсом – от нас. То же направление
имеют и активные составляющие токов
в проводниках. Электромагнитные силы
взаимодействия магнитных полей статора
и ротора создают вращающий момент в
направлении вращения поля статора.
Скорость
.
Согласно правилу правой руки ЭДС в
проводниках ротора под северным полюсом
направлены к нам, в проводниках под
южным полюсом – от нас. То же направление
имеют и активные составляющие токов
в проводниках. Электромагнитные силы
взаимодействия магнитных полей статора
и ротора создают вращающий момент в
направлении вращения поля статора.
Скорость![]() ,
с которой вращается двигатель, зависит
от его нагрузки. При холостом ходе
скорость
,
с которой вращается двигатель, зависит
от его нагрузки. При холостом ходе
скорость![]() становится почти равной
становится почти равной![]() ,
так как при
,
так как при![]() ЭДС и токи в роторе равны нулю и
электромагнитное взаимодействие
исчезает. Таким образом, асинхронная
машина работает в режиме двигателя в
пределах от
ЭДС и токи в роторе равны нулю и
электромагнитное взаимодействие
исчезает. Таким образом, асинхронная
машина работает в режиме двигателя в
пределах от![]() до
до![]() ,
т.е. при скольжении от
,
т.е. при скольжении от![]() до
до![]() .
При этом электрическая энергия, подводимая
к статору из сети, преобразовывается в
механическую энергию на валу.
.
При этом электрическая энергия, подводимая
к статору из сети, преобразовывается в
механическую энергию на валу.
Работа в режиме
генератора.
Предположим, что подключенный к сети
статор создает вращающееся магнитное
поле, а ротор приводится во вращение в
том же направлении со скоростью
![]() .
В этом случае скольжение будет
отрицательным, а ЭДС и токи ротора
изменяют направление по сравнению с
.
В этом случае скольжение будет
отрицательным, а ЭДС и токи ротора
изменяют направление по сравнению с![]() до
до![]() ,
т.е. при скольжении от
,
т.е. при скольжении от![]() до
до![]() .
.
Работа в режиме электромагнитного тормоза.
Допустим, что ротор
приводится во вращение против направления
вращения магнитного потока статора. В
этом случае к асинхронной машине
подводится энергия с двух сторон –
электрическая из сети и механическая
от первичного двигателя. Такой режим
работы называется режимом электромагнитного
тормоза. Он возникает при скольжении
от
![]() до
до![]() .
Примером практического применения
режима электромагнитного тормоза
является опускание груза в
подъемно-транспортных устройствах.
.
Примером практического применения
режима электромагнитного тормоза
является опускание груза в
подъемно-транспортных устройствах.
Слайд 10
Механическая характеристика

Механической
характеристикой двигателя называется
зависимость частоты вращения ротора
от момента на валу
![]() .
Механическую характеристику можно
представить как графическую зависимость
в координатах
.
Механическую характеристику можно
представить как графическую зависимость
в координатах![]() и
и![]() .
N1 – синхронная частота вращения, nн –
номинальная частота вращения, nк –
критическая частота вращения, Mп –
пусковой момент двигателя, Мн –
номинальный момент двигателя, Мк –
критический момент двигателя.
.
N1 – синхронная частота вращения, nн –
номинальная частота вращения, nк –
критическая частота вращения, Mп –
пусковой момент двигателя, Мн –
номинальный момент двигателя, Мк –
критический момент двигателя.
Слайд 11
Пуск и регулирование скорости асинхронного двигателя
Способы пуска
Прямой пуск
Кратность пускового
тока
![]() .
.
Пусковой момент
![]() .
.
Анализ показывает, что при прямом пуске возникают большой бросок тока и относительно небольшой пусковой момент. Это оказывает отрицательное влияние на возможность пуска самого электродвигателя и на устойчивость работы других электродвигателей из-за снижения напряжения.
Пуск переключением обмотки статора применяется для двигателей, работающих при соединении обмоток статора в треугольник. При пуске обмотка статора с помощью переключателя соединяется в звезду. В результате линейный пусковой ток уменьшается примерно в три раза, пусковой момент также уменьшается в три раза. Если пусковой момент достаточен для разгона электропривода, то такой пуск допустим. После пуска обмотку статора переключают на схему треугольника, и двигатель работает в нормальном режиме.
При автотрансформаторном
пуске
обмотка статора включается на пониженное
напряжение с помощью автотрансформатора.
Двигатель разгоняется при пусковом
токе и моменте в
![]() раз
меньше по сравнению с прямым пуском,
где
раз
меньше по сравнению с прямым пуском,
где![]() – коэффициент трансформации понижающего
автотрансформатора. В конце разгона
двигатель переключается на напряжение
сети.
– коэффициент трансформации понижающего
автотрансформатора. В конце разгона
двигатель переключается на напряжение
сети.
Слайд 12
Пуск
двигателя с фазным ротором
осуществляется путем включения пускового
реостата в цепь ротора через контактные
кольца и щетки. Сопротивление пускового
резистора![]() в фазе выбирают таким, чтобы пусковой
момент был максимальным.
в фазе выбирают таким, чтобы пусковой
момент был максимальным.
Пуск двигателя
поясняется схемой на рисунке. В момент
пуска двигатель развивает максимальный
момент и разгон происходит на участке
![]() механической характеристики 1.
механической характеристики 1.
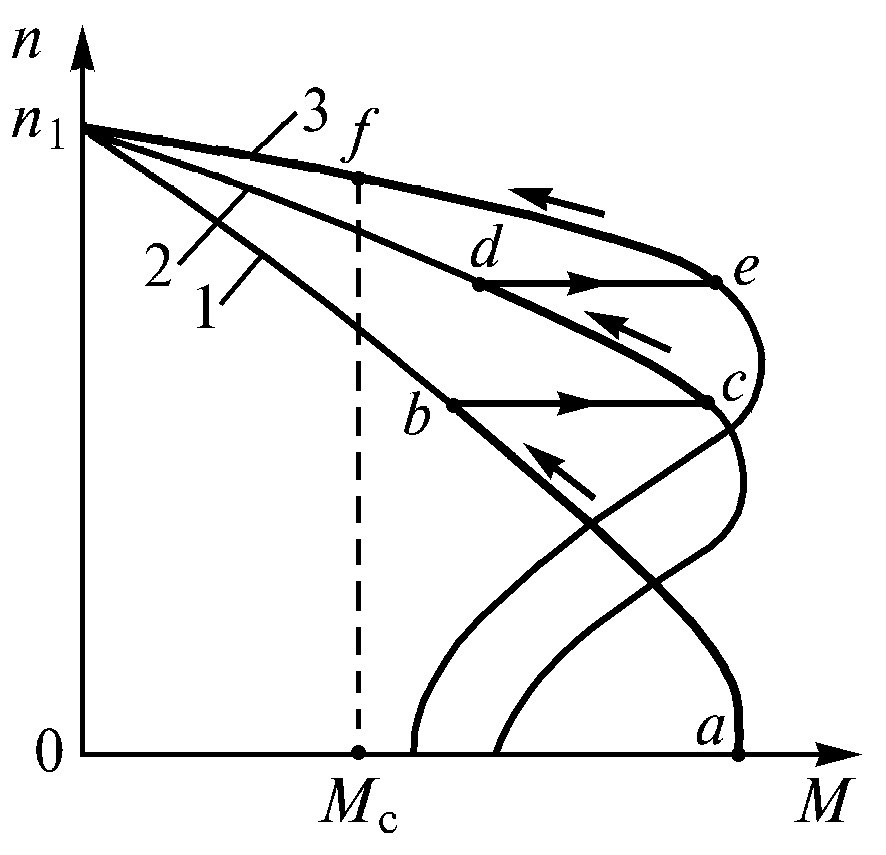
В момент,
соответствующий точке
![]() ,
выключается первая ступень резистора
и момент скачком увеличивается до точки
,
выключается первая ступень резистора
и момент скачком увеличивается до точки![]() механической характеристики 2; при
разгоне до точки
механической характеристики 2; при
разгоне до точки![]() выключается вторая ступень резистора
и рабочая точка скачком переходит в
точку
выключается вторая ступень резистора
и рабочая точка скачком переходит в
точку![]() естественной механической характеристики
3. Установившийся режим наступает в
точке
естественной механической характеристики
3. Установившийся режим наступает в
точке![]() соответствующей равенству моментов
двигателя и нагрузки. Резистор
закорачивается и щетки отводятся от
колец.
соответствующей равенству моментов
двигателя и нагрузки. Резистор
закорачивается и щетки отводятся от
колец.
Такой способ пуска применяют, как правило, для двигателей большой мощности при ограниченном пусковом токе и высоких требованиях к приводу. Недостатками способа являются значительные потери электрической энергии в пусковом резисторе и сложность устройства ротора.
Слайд 13
Частота вращения асинхронного двигателя
![]() .
.
Из этого равенства следует, что изменять
частоту вращения можно изменением
частоты
![]() числа пар полюсов
числа пар полюсов![]() и скольжения
и скольжения![]() .
.
Регулирование изменением частоты тока статора (частотное регулирование) требует применения источников питания с регулируемой частотой. В качестве такого источника может быть использован синхронный генератор с переменной скоростью вращения или полупроводниковый преобразователь частоты. В этом случае частота вращения и частота вращения ротора изменяются пропорционально частоте сети. К недостаткам частотного регулирования относятся громоздкость и высокая стоимость питающей установки.
Для регулирования частоты вращения изменением числа пар полюсов применяют двигатели с короткозамкнутым ротором, у которых на статоре нескольких обмоток, размещенных в общих пазах и разное число пар полюсов или обмотки, которые позволяют получить различные числа пар полюсов путем изменения (переключения) их схемы соединения (с последовательного соединения на параллельное и наоборот). При последовательном соединении число пар полюсов увеличивается, при параллельном – уменьшается.
Регулирование изменением числа пар полюсов является ступенчатым и применяется для уменьшения числа ступеней в коробках скоростей, вентиляторах, насосах и др.
Двигатели с изменяемым числом пар полюсов называют многоскоростными.
Масса и стоимость многоскоростных двигателей больше, чем односкоростных двигателей. Но их часто применяют в установках дискретного изменения частоты вращения.
Регулирование
скорости уменьшением напряжения на
статоре.
При уменьшении напряжения
![]() момент двигателя изменяется пропорционально
момент двигателя изменяется пропорционально![]() ,
что изменяет его механические
характеристики, следовательно, и
скольжение. Пределы регулирования
скорости соответствуют изменению
скольжения в интервале
,
что изменяет его механические
характеристики, следовательно, и
скольжение. Пределы регулирования
скорости соответствуют изменению
скольжения в интервале![]() .
.
Слайд 14
Синхронные машины
Общие сведения
Синхронными машинами называют электрические машины переменного тока, у которых частота вращения ротора находится в строго постоянном соотношении с частотой тока электрической сети.
Трехфазные синхронные генераторы являются основными источниками электрической энергии. Первичными двигателями для них являются паровые или гидравлические турбины. По этому признаку генераторы называют турбогенераторами и гидрогенераторами. На автономных электростанциях синхронные генераторы имеют небольшую мощность и приводятся во вращение дизельными двигателями, газовыми турбинами или от ветроколеса.
К преимуществам синхронных генераторов следует отнести:
– способность вырабатывать как активную, так и реактивную мощность (с возможностью ее регулирования);
– возможность регулирования выходного напряжения;
– возможность работы как с сетью, так и в автономном режимах без применения каких-либо сложных дополнительных устройств;
– высокий КПД.
Синхронные двигатели имеют постоянную частоту вращения и поэтому применяются там, где не требуется регулирование частоты или она должна быть постоянной. Мощность синхронных двигателей составляет десятки, сотни и тысячи киловатт на крупных металлургических заводах, в шахтах и других предприятиях. Имеются также синхронные микродвигатели мощностью от долей ватта до десятков ватт, используемых в схемах автоматики. Синхронная машина, работающая в режиме генератора или двигателя, может служить источником реактивной мощности. Специально предназначенный для этих целей ненагруженный активной мощностью двигатель называется синхронным компенсатором.
Слайд 15
Устройство синхронной машины
Синхронная машина состоит из двух основных частей: неподвижного статора, выполняющего функции якоря, и вращающегося ротора, служащего индуктором.
Статор, так же как у асинхронный машины, представляет собой полый цилиндр, набранный из листов электротехнической стали со штампованными на внутренней поверхности пазами, в которые укладывается трехфазная обмотка.
Ротор представляет собой электромагнит, обмотка которого питается постоянным током через два изолированных контактных кольца, вращающихся вместе с ротором. Постоянный ток подводится к ротору через неподвижные щетки, скользящие по контактным кольцам.
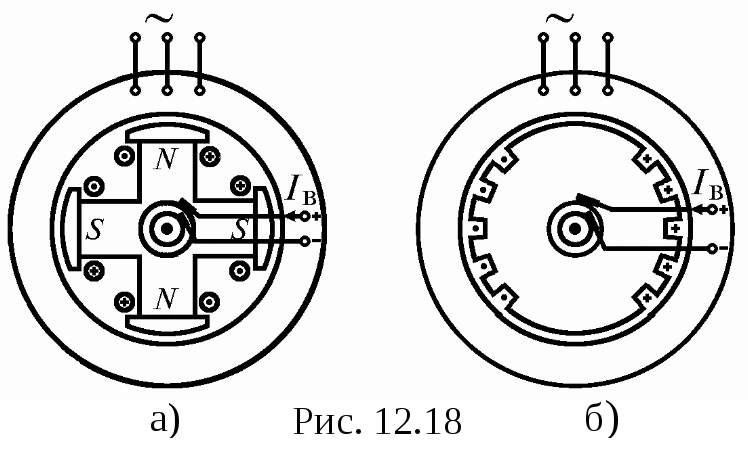
Конструктивно различают два типа роторов: явнополюсный (левый) и неявнополюсный (правый).
Явнополюсный ротор, имеющий выступающие полюсы, применяют у машин с частотой вращения до 1000, 1500 об/мин. Неявнополюсный ротор, имеющий вид цилиндра, применяют при скоростях 1500 и 3000 об/мин.

Зависимость электромагнитного момента от угла рассогласования между осевыми линиями полюсов статора и ротора синхронной машины называется угловой характеристикой.
Угловая характеристика имеет вид синусоиды.
При M>0 направления действия электромагнитного момента и ротора – совпадают, машина работает в качестве двигателя.
При М<0 эти направления противоположны – машина работает в качестве генератора.