

физика с примерами oc
.pdfМинистерство образования и науки Украины ХАРЬКОВСКИЙ НАЦИОНАЛЬНЫЙ АВТОМОБИЛЬНО-ДОРОЖНЫЙ
УНИВЕРСИТЕТ
Гаврилова Т.В., Еремина Е.Ф., Федорченко Д. В.
ФИЗИКА С ПРИМЕРАМИ РЕШЕНИЯ ЗАДАЧ. МЕХАНИКА
Учебно-методическое пособие
Харьков
2010
2
Пособие содержит теоретический материал школьного курса физики по разделу «Механика». Материал представлен в виде таблиц, снабжен рисунками и схемами, что помогает учащимся выделить и запомнить основные понятия и законы кинематики, динамики и статики. Для более углубленного изучения курса предлагаются примеры решения типовых и оригинальных задач для каждой темы. Разделение материала на тематические блоки подготавливает учащихся к обучению по кредитномодульной системе.
Данное учебно-методическое пособие может быть рекомендовано учащимся подготовительных отделений, студентам факультета заочного отделения, а также студентам младших курсов университета для изучения и повторения основных понятий и законов физики.
3
Тема 1. КИНЕМАТИКА
Механика – раздел физики, в котором изучается механическое движение.
Механическое движение – изменение положения данного тела (или его частей) относительно других тел.
Основные понятия кинематики
Кинематикой называется раздел механики, в котором изучаются механические движения тел во времени и не рассматриваются какие-либо воздействия на эти тела других тел или полей.
Материальной точкой называется тело, размерами которого в данной задаче можно пренебречь.
Тело, по отношению к которому рассматривается данное механическое движение, называется телом отсчета.
Z |
|
Y |
|
|
|
|
|
zM |
|
M |
|
|
|
|
|
M |
yM |
|
|
|
|
||
|
|
r |
M |
|
|||
r |
|
|
|
||||
yM |
|
r |
|
|
|||
|
|
|
|
|
|||
0 |
|
|
|
|
0 |
xM |
X |
x |
Y |
|
xM |
X |
|||
|
|
|
|
||||
M |
|
|
|
|
|
|
|
X
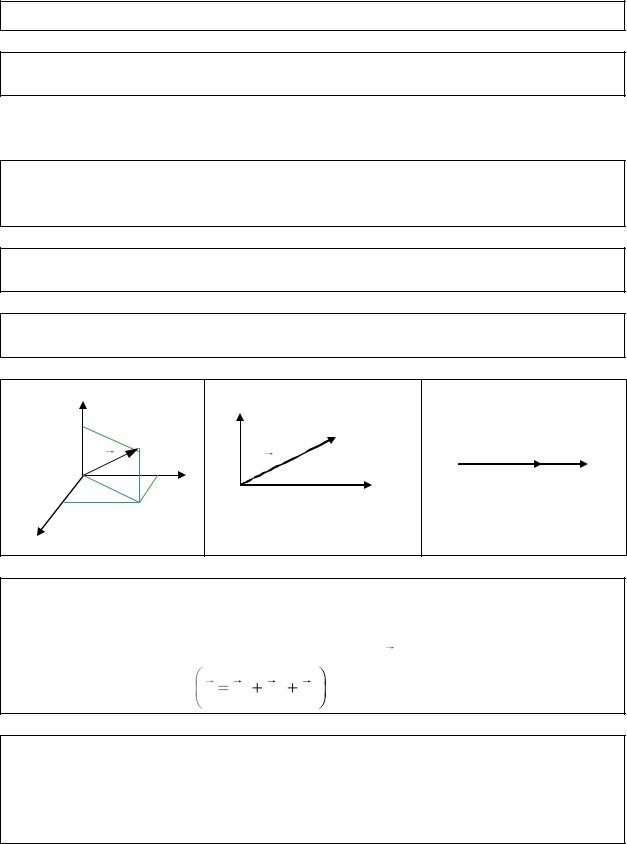
Положение точки в пространстве:
а) определяется координатами (3-мя, 2-мя или одной в зависимости от вида движения);
б) может быть задано радиусом-вектором r , проведенным из начала
отсчета 0 до точки M r rx |
ry |
rz . |
Системой отсчета называют совокупность тела отсчета и системы координат.
Система отсчета должна быть снабжена часами, отсчитывающими промежутки времени от произвольно выбранного начального момента времени.
4

РЕШЕНИЕ ТИПОВЫХ ЗАДАЧ
1. Вектор r лежит в плоскости хOy и составляет угол α = 30о с осью Оx. Его модуль равен 6 см. Определить проекции вектора на оси Оx и Оy
Дано: α = 30о
r= 6 см
rX – ? rУ – ?
Решение
усм
ry |
r |
|
|
α |
|
О |
rX |
х, см |
Из соответствующих прямоугольных треугольников определим проекции rx и ry как катеты
|
rx |
r |
cos |
, |
|
ry |
|
r |
sin . |
||
Находим численное значение |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
r |
6 cos 30о |
6 |
3 |
|
5,2 см , |
||||||
|
|
|
|
|
|||||||
|
|
|
|
|
|||||||
x |
|
|
|
|
2 |
|
|
|
|||
|
|
|
|
|
|
|
|
||||
r |
6 sin 30о |
6 |
1 |
|
|
3 см |
|||||
|
|
|
|
||||||||
y |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
2. Положение точки М задано координатами хM = 5 см; уM = 5 см. Определить модуль радиуса-вектора точки и угол его наклона к оси Оx.
Дано |
|
Решение |
|
|
|
|
|
|
|
|
|
|
|
|
|
т.М(5;5) |
|
|
|
у |
см |
|
|
|
|
|
|
|
|
|
|
r – ? |
|
|
|
|
|
М |
|
|
|
|
|||||
|
|
|
ум |
|
|
|
|
|
|
||||||
α – ? |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
О |
|
|
хм |
|
|
|
|
|
х, см |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Из прямоугольного треугольника модуль радиуса - вектора |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
x2 |
у2 |
52 |
|
52 5 2 7 см |
||||||
|
|
|
|
|
м |
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tg |
|
yм |
|
|
5 |
1 |
, |
|
|
|
|
|
|
|
|
|
хм |
5 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
откуда
arctg 1 45o
5
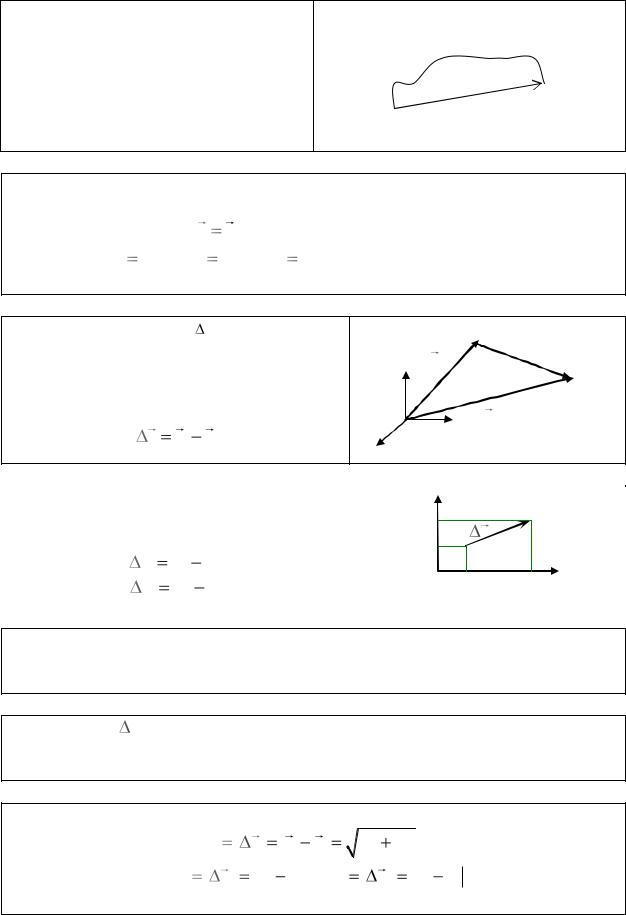
Вектор перемещения. Путь.
Вектором перемещения материаль-
ной точки называется направленный отрезок прямой, соединяющий начальное положение тела с его конечным положением.
Траекторией называется линия, по которой движется точка.
Траектория
Вектор
перемещения
Траектория движения материальной точки задается уравнениями движения:
r |
r |
t |
(в векторной форме), |
x f1 t , y |
f2 |
t |
, z f3 t (в скалярной форме). |
По виду траектории различают прямолинейное движение и криволинейное.
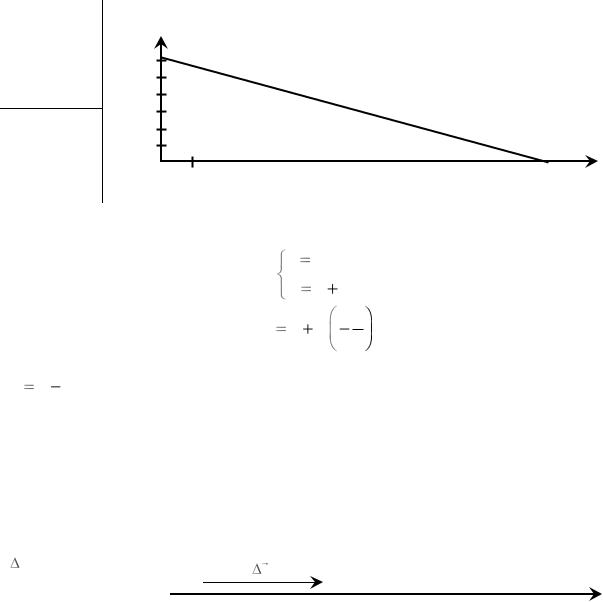
Вектор перемещения r – разность радиус-векторов, характеризующих конечное и начальное положение точки, движущейся в течении определенного промежутка времени
r r2 r1
|
M1 |
|
r1 |
z |
M2 |
|
|
O |
r2 |
x |
y |
|
Длина отрезка между проекциями начала |
y |
|
M 2 |
|
|||
и конца вектора |
на |
ось |
называется |
|
|
||
y2 |
|
|
|||||
|
r |
|
|||||
проекцией вектора на ось |
|
|
|
||||
|
y1 |
|
|
|
|||
r |
x |
x , |
|
M1 |
|
|
|
x |
2 |
1 |
|
|
|
|
|
ry |
y2 |
y1 |
|
|
x1 |
x2 |
X |
|
|
|
|||||
Проекция считается положительной, если от проекции начала к проекции конца вектора нужно идти по направлению оси, и отрицательной в противоположном случае.
Путь ( S или S ) является скалярной величиной, равной длине участка траектории, пройденного движущейся точкой за данный промежуток времени.
Для прямолинейного движения в одну сторону
|
|
S |
|
|
r |
|
r |
r |
|
S 2 |
S 2 |
, |
||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
2 |
|
1 |
|
|
x |
y |
|
|
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Sx |
|
rx |
|
|
x2 |
x1 |
, |
|
Sy |
|
ry |
|
|
x2 x1 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6
РЕШЕНИЕ ТИПОВЫХ ЗАДАЧ
3. Координаты материальной точки, движущейся в плоскости XOY, изменяются согласно формуле х = -4t, y = 6 + 2t. Запишите уравнение траектории у = y(x). Найдите начальные координаты движущейся точки и ее координаты через 1 с после начала движения
Дано:
х = -4t
у = 6 + 2t
t0 = 0 t1 = 1 с
у = у(x) – ?
х0 – ? у0 – ? х1 – ? у1 – ?
Решение
у
6
4
2
|
|
|
|
|
|
|
|
|
|
|
|
х |
2 |
4 |
6 |
8 |
10 |
12 |
|||||||
Для нахождения уравнения траектории исключим t из системы
уравнений |
|
|
x |
-4t |
, |
y |
6 2t |
y 6 2 4x .
Видим, что уравнение траектории является уравнением прямой линии y 6 0,5x
Начальные координаты тела (t0 = 0): х0 = 0; у0 = 6 Координаты тела при t1 = 1 с: х1 = -4; у1 = 6 + 2 = 8
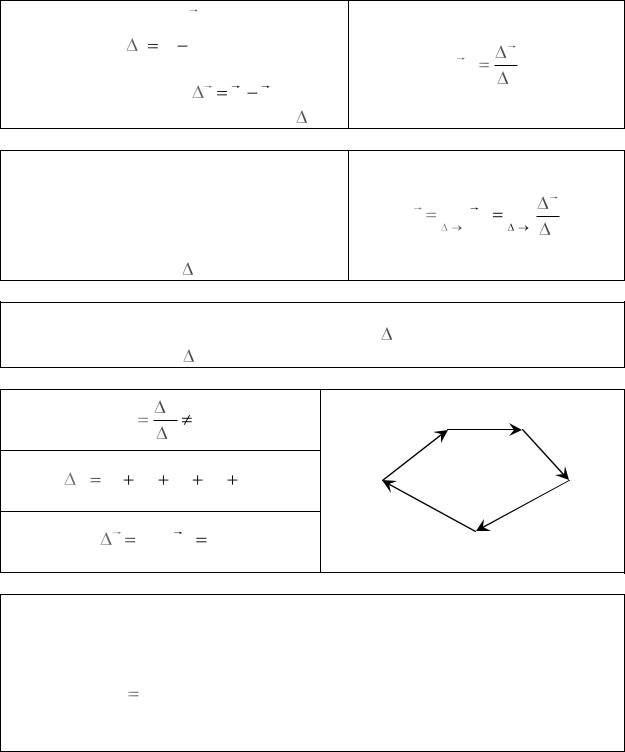
4. Изобразите траекторию |
движения, |
при которой модуль |
|||||
перемещения равен 10 см, а путь - 30 см. |
|
|
|||||
Дано: |
|
Решение |
|
|
|
|
|
|
|
|
|
|
|||
r = 10см |
|
|
r |
|
|
|
|
S = 30 см |
|
|
|
А |
|
Б |
|
|
|
|
|
|
|||
|
|
|
|
|
|||
Траектория – ? |
|
|
|
|
|
|
|
|
0 |
10 |
20 |
||||
|
|
||||||
|
|
|
|
|
|
|
|
Если начальная точка О, а конечная А, то вариантами траектории являются: ОАБА и ОАОА. Длина каждой траектории – путь:
S1 = ОА + АБ + БА = 30 см
S2 = ОА + АО +ОА = 30 см
7
|
|
|
|
|
|
Скорость |
|
|
|
|
|
|
Средней скоростью |
vcp |
за промежуток |
|
|
|
|
|
|||||
времени |
t |
t2 |
|
t1 |
|
называется |
|
vcp |
r |
|
|
|
физическая величина, равная отношению |
|
t |
|
|
||||||||
вектора перемещения |
|
r |
r2 |
r1 точки к |
|
|
|
|
||||
|
|
|
|
|
|
|||||||
длительности промежутка времени |
t . |
|
|
|
|
|
||||||
Скоростью (мгновенной скоростью, |
|
|
|
|
|
|||||||
скоростью в данный момент времени) |
|
|
|
|
|
|||||||
называется физическая величина, равная |
v |
lim vcp |
lim |
|
r |
|||||||
пределу, к которому стремится средняя |
|
t |
||||||||||
|
t 0 |
t 0 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|||
скорость при бесконечном уменьшении |
|
|
|
|
|
|||||||
промежутка времени |
|
t . |
|
|
|
|
|
|
|
|
||
Средней скалярной (средней путевой) скоростью называется физическая |
||||||||||||
величина, определяемая отношением пути |
S , |
пройденного |
|
точкой за |
||||||||
промежуток времени t , к длительности этого промежутка. |
|
|
|
|||||||||
v |
|
S |
|
0 |
|
|
|
|
r2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
ср |
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r1 |
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
3 |
S S1 |
S2 |
S3 |
|
S4 |
S5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r5 |
|
r4 |
||
r |
0 |
vср |
0 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||||
В зависимости от характера изменения скорости различают два вида |
||||||||||||
движения: |
|
|
|
|
|
|
|
|
|
|
|
|
Равномерное движение – движение материальной точки, при |
||||||||||||
котором модуль ее мгновенной скорости с течением времени не |
||||||||||||
изменяется. v |
const |
|
|
|
|
|
|
|
|
|
|
|
Неравномерное движение – движение, при котором модуль |
||||||||||||
мгновенной скорости точки с течением времени изменяется. |
|
|
|
|||||||||
8
РЕШЕНИЕ ТИПОВЫХ ЗАДАЧ
5. При движении вдоль оси Ох координата точки изменилась за 5 с от значения х1 = 10 м до значения х2 = - 10 м. Найдите модуль скорости точки и проекцию вектора скорости на ось Оx. Считать скорость постоянной.
Дано: |
|
Решение |
|
|
|
|
|
|
|
|||||
t = 5 c |
|
|
|
|
|
|
|
|
|
|
v |
|||
x1 = 10 м |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
r |
|
|
|
|||
x2 = - 10 м |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
v |
?, vx ? |
|
--10 |
|
|
|
|
0 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
По определению средней скорости: vср |
||||||||||||
|
|
Для постоянной скорости: vср |
|
v |
||||||||||
|
|
|
|
|
|
|
|
r |
|
|
|
|||
|
|
Модуль |
скорости: |
|
v |
|
|
|
|
, где |
||||
|
|
|
|
|
||||||||||
|
|
|
|
|
|
t |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 х,
rt .
r |
|
х2 х1 |
|
10 10 |
20 м , |
тогда |
|
v |
|
20 |
4 |
м |
. |
|
|
|
|||||||
|
|
|
|
|||||
|
|
|
|
|||||
|
|
|
|
|
|
|
с |
|
|
|
|
5 |
|
|
|||
|
|
|
|
|
|
|||
|
Из рисунка следует, что vср = - 4 м/с, так как направление средней |
|||||||
скорости совпадает с направлением вектора перемещения |
||||||||
6. Вычислить среднюю скорость движения автомобиля, если первую треть пути он шел со скоростью 60 км/ч, а остальную часть пути – со скоростью 40 км/ч
Дано: |
|
Решение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
v1= 60 км/ч |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
1/3 S |
|
|
|
|
|
|
|
|
|
|
2/3 S |
|
|
|
|||
S1 = |
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
v2= 40 км/ч |
|
|
|
|
|
|
|
|
|
v1 |
|
|
|
|
|
|
|
|
|
|
v2 |
|
|
|
|
|
|||||
S2 = |
2 |
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
3 |
|
|
|
|
По определению средней путевой скорости |
|
|||||||||||||||||||||||||
vср- ? |
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
S1 |
S2 |
, |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ср |
|
|
t1 |
t2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
где |
|
t1 |
S1 |
|
|
S |
, |
|
|
|
|
t2 |
|
S2 |
|
2S |
. |
|||
|
|
|
|
|
|
|
|
|
|
|
|
v1 |
|
3v1 |
|
|
|
|
|
v2 |
|
3v2 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
Подставляя в исходное выражение, получим |
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
v |
|
|
|
|
S |
|
|
|
|
3v1 |
v2 |
3 |
|
40 |
60 |
|
45 |
км |
|
|
|
|||||
|
|
|
|
|
ср |
S |
2S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
v2 |
2v1 |
40 |
2 |
60 |
|
|
|
ч |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
3v1 |
3v2 |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
9
Относительность движения
Относительно не только положение тела, относительно и его движение. Скорости тел, как и их перемещения, могут быть различными относительно разных систем отсчета, движущихся относительно друг друга.
Перемещение, скорость – относительные величины.
Y |
|
Y |
|
|
|
|
M |
|
|
|
r |
r0 |
O |
r |
X |
|
|
|
|
O |
|
|
X |
|
|
|
|
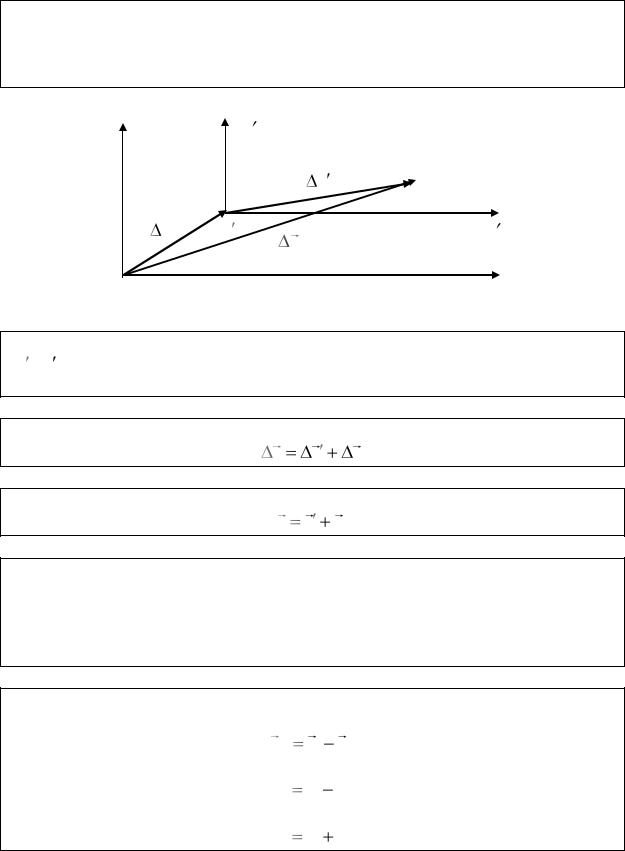
XOY – система координат, связанная с наблюдателем на берегу
X OY – система координат, связанная с наблюдателем на перемещаемом теле относительно системы координат XOY.
Вектор перемещения в неподвижной системе r r r0
Формула сложения скоростей: v v v0
Классический закон сложения скоростей:
Скорость движения тела относительно неподвижной системы координат равна геометрической сумме двух скоростей: скорости тела относительно подвижной системы координат и скорости самой подвижной системы относительно неподвижной.
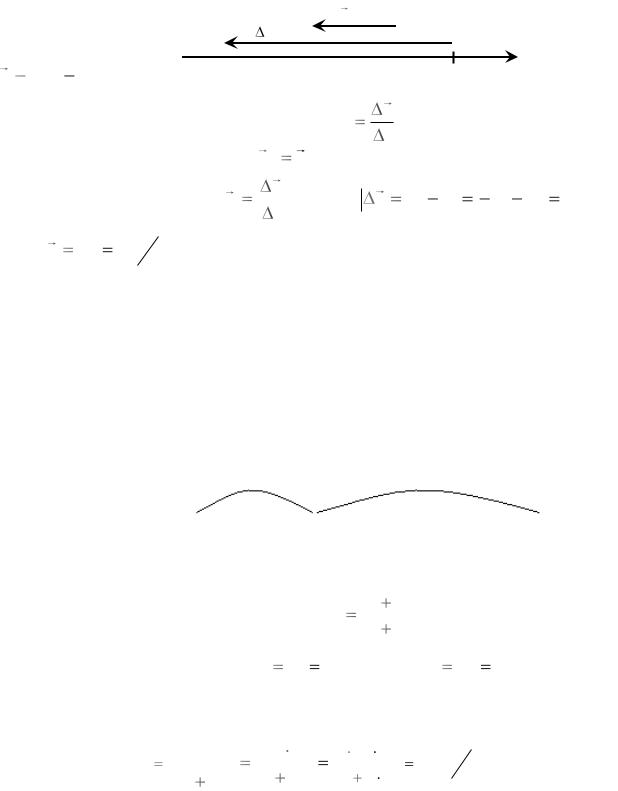
Относительная скорость первого тела относительно второго равна разности скоростей тел, определенных в одной системе отсчета.
v12 v1 v2 .
При движении в одном направлении
v12 v1 v2 ;
при встречном движении
v12 v1 v2 .
10