

При плоском поперечном изгибе
![]() .
(7.18)
.
(7.18)
Складывая полученные значения для элементарной работы внутренних сил и интегрируя по длине стержня, можно получить полную работу внутренних сил для общего случая действия сил на стержень при возникновении всех шести силовых факторов:
 (7.19)
(7.19)
Потенциальная
энергия при возникновении всех шести
внутренних силовых факторов с учетом
![]() принимает вид:
принимает вид:
 (7.20)
(7.20)
Из приведенной формулы видно, что потенциальная энергия деформации является квадратичной функцией обобщенных сил или обобщенных перемещений, так как последние линейно связаны с обобщенными силами. Следовательно, потенциальная энергия деформации всегда положительна. Ее величина не зависит от порядка нагружения и целиком определяется окончательными значениями усилий и перемещений. Отметим также, что потенциальная энергия как квадратичная функция обобщенных нагрузок не подчиняется принципу независимости действия сил. Это значит, что потенциальная энергия, накопленная в результате действия группы сил, не равна сумме потенциальных энергий, вызванных действием каждой нагрузки в отдельности. Закон независимости действия сил при вычислении потенциальной энергии применим лишь в тех случаях, когда перемещение по направлению одной обобщенной силы, вызванное действием другой силы, равно нулю.
Приведенные выражения для потенциальной энергии деформации получены для статического приложения нагрузок при сохранении равновесия в течение всего процесса нагружения. Следует сказать, что полученные формулы сохраняют силу и при любом способе приложения нагрузок, лишь бы значения сил и деформаций были связаны линейной зависимостью и относились к тому моменту, когда установится равновесие конструкции.
Рассмотрим несколько примеров определения перемещений с применением потенциальной энергии деформации.
Пример
7.1.Определить величину потенциальной
энергии деформации в шарнирно-стержневой
системе (Рис.7.5), нагруженной в узле В
вертикальной силой![]() кН.
Стержни АВ и ВС имеют одинаковые площади
поперечного сечения
кН.
Стержни АВ и ВС имеют одинаковые площади
поперечного сечения![]() см2и изготовлены из одного материала
см2и изготовлены из одного материала![]() МПа.
Найти (в мм) вертикальное перемещение
узла В.
МПа.
Найти (в мм) вертикальное перемещение
узла В.

Рис.7.5
Решение:
1. Находим усилия в стержнях АВ и ВС:
![]() ;
(а)
;
(а)
![]() .
(б)
.
(б)
Из
уравнения (б) находим:
![]() кН;
из уравнения (а) находим :
кН;
из уравнения (а) находим :![]() кН.
кН.
2. Определяем потенциальную энергию системы:
![]() Нм.
Нм.
3. Находим вертикальное
перемещение узла В. Представим
потенциальную энергию деформации как
половину произведения силы
![]() ,
приложенной в узле, на вертикальное
перемещение узла В
,
приложенной в узле, на вертикальное
перемещение узла В![]() :
:
![]() .
.
Откуда:
![]() м
м![]() мм.
мм.
Пример 7.2.
Вычислить
потенциальную энергию деформации балки
на двух опорах (Рис.7.6), нагруженную силой
![]() кН.
Определить перемещение под силой и
посредине пролета. Жесткость поперечного
сечения балки принять равной
кН.
Определить перемещение под силой и
посредине пролета. Жесткость поперечного
сечения балки принять равной![]() кНм2.
кНм2.

Рис.7.6
Решение:
Вычисляем опорные реакции:
 ;
; .
.
Вычисляем изгибающий момент на каждом участке:
![]()
![]() ;
;
![]() .
.
Определяем потенциальную энергию деформации:
 Нм.
Нм.
4. Находим прогиб
под силой. Для этого вычислим работу,
которую совершает сила
![]() на перемещении балки
на перемещении балки![]() :
:
![]() ;
;
![]() ,
,
откуда
![]() м
м![]() мм.
мм.
5. Находим прогиб
посредине балки при
![]() .
Получим:
.
Получим:
 м
м![]() мм.
мм.
7.4. Определение перемещений методом Мора
Метод Мора является самым общим методом определения перемещений в стержневых системах. В известном смысле этот метод является универсальным, так как способен находить перемещения для различных видов деформации и в случаях сложной деформации.
Рассмотрим статически определимую раму, нагруженную в сечении К сосредоточенной силой (Рис.7.7,а). Рамой называется стержневая система, элементы которой соединены в узлах жестко, без взаимного поворота сечений в узлах.

Рис.7.7
Требуется определить
вертикальное перемещение сечения
![]() ,
вызванное внешней силой, приложенной
в сечении
,
вызванное внешней силой, приложенной
в сечении![]() .
.
Поступим следующим
образом: сначала приложим в сечении
![]() фиктивную сосредоточенную силу
фиктивную сосредоточенную силу![]() .
Рама деформируется и сечение
.
Рама деформируется и сечение![]() переместится на величину
переместится на величину![]() .
Двойная индексация у перемещений
означает следующее: первый индекс
означает наименование сечения, в котором
прикладывается фиктивная сила, т.е.
наименование того сечения, в котором
определяется перемещение. Второй индекс
означает причину, вызвавшую это
перемещение. В данном случае – это сила
.
Двойная индексация у перемещений
означает следующее: первый индекс
означает наименование сечения, в котором
прикладывается фиктивная сила, т.е.
наименование того сечения, в котором
определяется перемещение. Второй индекс
означает причину, вызвавшую это
перемещение. В данном случае – это сила![]()
![]() .
В более общем случае это может быть
любая нагрузка, приложенная к конструкции
и вызывающая деформацию.
.
В более общем случае это может быть
любая нагрузка, приложенная к конструкции
и вызывающая деформацию.
Затем приложим к
раме действительную силу
![]() ,
после чего рама деформируется еще
больше. При этом сечение
,
после чего рама деформируется еще
больше. При этом сечение![]() переместится на величину
переместится на величину![]() ,
а сечение
,
а сечение![]()
на величину
на величину
![]() .
Перемещение
.
Перемещение![]() и есть то перемещение, которое и следует
определить.
и есть то перемещение, которое и следует
определить.
Для его определения поступим следующим образом. Вычислим работу, которую совершают внешние силы при статическом нагружении:
![]() .
(7.21)
.
(7.21)
В последнем члене
уравнения (7.21) отсутствует коэффициент
![]() ,
так как в момент приложения к раме силы
,
так как в момент приложения к раме силы![]() фиктивная сила
фиктивная сила![]() является неизменной по величине и
направлению.
является неизменной по величине и
направлению.
Вычислим потенциальную энергию деформации с учетом, что в раме возникают продольная сила и изгибающий момент, и их действие происходит одновременно (влиянием поперечной силы будем пренебрегать):

(7.22)
На основании (7.3)
работа внешних сил
![]() (7.21) должна быть равна накопленной
потенциальной энергии
(7.21) должна быть равна накопленной
потенциальной энергии![]() (7.22). Приравняем их.
(7.22). Приравняем их.
При составлении
выражения для работы внешних сил мы
использовали принцип независимости
действия сил (принцип суперпозиции). Но
при вычислении потенциальной энергии
принцип суперпозиции в данном случае
не применим, так как потенциальная
энергия является квадратичной функцией
и накапливается она в результате
одновременного действия сил
![]() и
и![]() .
В связи с этим потенциальная энергия,
накопленная в результате действия
группы сил, не равна сумме потенциальных
энергий, вызванных действием каждой
силы в отдельности. Очевидно, в уравнении
(7.22) имеются члены, которые не появились
бы при суммировании потенциальных
энергий от действия каждой силы в
отдельности. Выясним, что это за члены
и какой части в уравнении работ (7.21) они
соответствуют.
.
В связи с этим потенциальная энергия,
накопленная в результате действия
группы сил, не равна сумме потенциальных
энергий, вызванных действием каждой
силы в отдельности. Очевидно, в уравнении
(7.22) имеются члены, которые не появились
бы при суммировании потенциальных
энергий от действия каждой силы в
отдельности. Выясним, что это за члены
и какой части в уравнении работ (7.21) они
соответствуют.
Для этого вычислим величину потенциальной энергии деформации, накапливаемой в раме при действии каждой силы в отдельности:
При действии только
силы
![]() :
:
 .
(7.23)
.
(7.23)
При действии только
силы
![]() :
:
 .
(7.24)
.
(7.24)
Перепишем выражение (7.21) в виде:
![]() (7.25)
(7.25)
и подставим в это уравнение выражения (7.23) и (7.24). Получим:

 .
.
После взаимных сокращений получаем:
![]() .
(7.26)
.
(7.26)
Положим
![]() .
Тогда из выражения (7.26) находим искомое
перемещение
.
Тогда из выражения (7.26) находим искомое
перемещение![]() :
:
![]() .
(7.27)
.
(7.27)
Выражение (7.27) и
представляет собой интеграл Мора. Здесь:
![]() и
и![]()
продольная сила и изгибающий момент,
возникающие в системе от действия
внешней силы
продольная сила и изгибающий момент,
возникающие в системе от действия
внешней силы
![]() .
.
Как уже отмечалось, метод Мора является методом универсальным. Для самого общего случая нагружения, когда возникают все шесть внутренних силовых факторов, интеграл Мора принимает вид:
![]()
![]() (7.28)
(7.28)
В большинстве случаев при определении перемещений в балках и рамах можно пренебречь влиянием продольной деформации и деформации сдвига, учитывая лишь перемещения, вызываемые изгибом и кручением. Тогда формула (7.28) для плоской системы принимает вид:
![]() .
(7.29)
.
(7.29)
При пространственном нагружении интеграл Мора записывается следующим образом:
 (7.30)
(7.30)
При расчете шарнирных ферм, образованных прямыми стержнями, в формуле Мора сохраняется лишь член, содержащий продольную силу:
![]() (7.31)
(7.31)
Эта формула носит название формулы Максвелла.
Сформулируем следующий порядок определения перемещений по методу Мора:
1. Строим вспомогательную систему, которую нагружаем единичной силой в сечении, где требуется определить перемещение. Определяя линейные перемещения, в заданном направлении прикладываем единичную силу; определяя угловые перемещения, прикладываем единичный момент.
2. Для каждого
участка системы выписываем выражения
силовых факторов в произвольном сечении
заданной (![]() ,
,![]() ,
,![]() )
и вспомогательной (
)
и вспомогательной (![]() ,
,![]() ,
,![]() ) систем.
) систем.
3. Вычисляем интегралы Мора (по участкам в пределах всей системы). При расчете плоских рам и балок применяем формулу (7.29), при расчете плоских ферм – формулу (7.31).
4. Если вычисленное перемещение имеет положительный знак, то это означает, что его направление совпадает с направлением единичной силы. Отрицательный знак указывает на то, что действительное направление искомого перемещения противоположно направлению единичной силы.
Рассмотрим примеры применения метода Мора для определения перемещений в стержневых системах.
Пример 7.3.
Используя формулу Максвелла, найти
вертикальное перемещение узла В (в мм)
фермы, изображенной на рис.7.8,а, если
жесткости стержней фермы одинаковы
![]() кН.
кН.
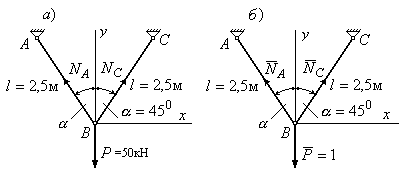
Рис.7.8
Решение:
1. Определяем грузовые усилия в стержнях фермы:
![]() ;
(а)
;
(а)
![]() .
(б)
.
(б)
Из уравнения (а)
устанавливаем, что
![]() .
Из уравнения (б) находим:
.
Из уравнения (б) находим:
![]() .
.
2. Изображаем единичное состояние системы (Рис.7.8,б) и аналогичным образом находим усилия в стержнях фермы при единичном состоянии:
![]() .
.
3. Подставляем полученные выражения для усилий в грузовом и единичном состояниях в формулу Максвелла (7.31) и перемножаем. Получаем:
![]() м
м![]() мм.
мм.
Пример 7.4.
Определить с помощью метода Мора прогиб
и угол поворота в сечении В для балки,
изображенной на рис. 7.9,а, если жесткость
поперечного сечения балки равна
![]() кНм2.
кНм2.

Рис.7.9
Решение:
1. Изображаем
грузовое состояние балки (Рис.7.9,а),
нагружая балку в сечении В сосредоточенной
силой, равной единице, и записываем
выражение для изгибающего момента в
сечении
![]() :
:
![]() .
(в)
.
(в)
2. Изображаем первое
единичное состояние балки (Рис.7.9,б) и
записываем выражение для единичного
изгибающего момента в сечении
![]() :
:
![]() .
(г)
.
(г)
3. Подставляем выражения (в) и (г) в формулу Мора (7.29) и интегрируем:
 м
м![]() мм.
мм.
4. Изображаем второе
единичное состояние (Рис.7.9,в), нагружая
балку в сечении В сосредоточенной парой
сил, равной единице, и записываем
выражение для изгибающего момента в
сечении
![]() :
:
![]() .
(д)
.
(д)
5. Подставляем выражения (в) и (д) в формулу Мора (7.29) и интегрируем:
 рад.
рад.