

Жылдамдықтардың лездік центрінің орнын анықтаудың дербес жағдайлары
Ж
 ылдамдықтардың
лездік центрінің
негізгі
қасиеттерін қолданып, жазық қиманың
нүктелерінің жылдамдықтарының әртүрлі
бағыттары үшін жылдамдықтардың лездік
центрінің
орнын
анықтауға болады.
ылдамдықтардың
лездік центрінің
негізгі
қасиеттерін қолданып, жазық қиманың
нүктелерінің жылдамдықтарының әртүрлі
бағыттары үшін жылдамдықтардың лездік
центрінің
орнын
анықтауға болады.
-
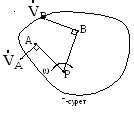
Егер жазық қиманың бір нүктесі (А нүктесі) жылдамдығының шамасы мен бағыты, ал екінші нүктесінің (В нүктесі) жылдамдығының тек бағыты белгілі болса (2.22 сурет), онда ЖЛЦ (Р нүктесі) А және В нүктелерінен олардың жылдамдық векторларының бағыттарына жүргізілген перпендикулярлардың қиылысу нүктесінде жатады.
 векторының
бағытымен
векторының
бағытымен
 және
және
 векторларының бағыты анықталады. (13)
өрнегінен жазық қиманың кез келген
нүктесінің жылдамдығы және қиманың
бұрыштық жылдамдығы табылады.
векторларының бағыты анықталады. (13)
өрнегінен жазық қиманың кез келген
нүктесінің жылдамдығы және қиманың
бұрыштық жылдамдығы табылады. -
Егер жазық қиманың екі нүктесінің (А мен В) жылдамдықтарының векторлары параллель, шамалары белгілі және осы нүктелерді қосатын түзуге перпендикуляр бағытталса (8-сурет), онда ЖЛЦ (Р нүктесі) жылдамдық векторларының басы мен ұшы арқылы жүргізілген түзулердің қиылысу нүктесінде жатады. Қиманың бұрыштық жылдамдығының бағыты нүкте жылдамдықтары бағытымен анықталады, ал оның шамасы мен қиманың басқа нүктелерінің жылдамдықтары (13) өрнегінен табылады.
-
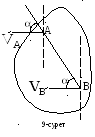
Егер жазық қиманың екі нүктесінің (А және В) жылдамдықтарының векторлары параллель, бірақ осы нүктелерді қосатын түзуге перпендикуляр болмаса (9-сурет), онда
 және
және
 векторларына тұрғызылған перпендикуляр
түзулер қиылыспайды, демек ЖЛЦ шексіздікте
жатады, бұл ЖЛЦ жоқ дегенді білдіреді.
векторларына тұрғызылған перпендикуляр
түзулер қиылыспайды, демек ЖЛЦ шексіздікте
жатады, бұл ЖЛЦ жоқ дегенді білдіреді.
Жылдамдықтардың
проекциялары туралы теорема бойынша
![]() .
Осыдан
.
Осыдан
![]() және
және
![]() ;
басқа нүктелер үшін де осылай болады.
;
басқа нүктелер үшін де осылай болады.
![]() болғандықтан, (13) өрнегінен бұрыштық
жылдамдықтың нөлге тең екенін көреміз:
болғандықтан, (13) өрнегінен бұрыштық
жылдамдықтың нөлге тең екенін көреміз:
![]() .
Бұл жағдайда дене лездік ілгерілемелі
қозғалыс жасайтын болады.
.
Бұл жағдайда дене лездік ілгерілемелі
қозғалыс жасайтын болады.
-
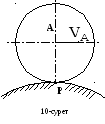
Егер дене қозғалмайтын бетпен сырғанамай домалайтын болса, онда ЖЛЦ (Р нүктесі) денелердің жанасу нүктесінде жатады (10-сурет).
Жазық-параллель қозғалыстың айналмалы қозғалыстан айырмашылығы жылдамдықтардың лездік центрі өзінің жазықтықтағы орнын өзгертіп отырады.
Жазық-параллель қозғалыстағы дене нүктелерінің үдеуі
Жазық
қиманың кез келген нүктесінің үдеуін
анықтау үшін (4) теңдеуін ескеріп, (6)
өрнегін былай жазамыз:
![]()
Енді осы өрнекті дифференциалдаймыз:
![]() .
(14)
.
(14)
Бұл теңдеудегі
![]() (15)
(15)
А және В нүктелерінің үдеулерін, ал:
![]() (16)
(16)
В нүктесінің А полюсін айналғандағы жылдамдығын береді.
![]() (17)
(17)
қиманың бұрыштық үдеуінің векторы.
(15) – (17) теңдіктерін (14)-ке қойып мынаны аламыз:
![]() .
(18)
.
(18)
Соңғы екі қосылғыш А нүктесі бекітулі болған кездегі В нүктесінің үдеуін анықтайды, сондықтан олардың қосындысы В нүктесінің А нүктесінен қима жазықтығына перпендикуляр өтетін қозғалмайтын өсті айналғандағы үдеуін береді:
![]() .
(19)
.
(19)
Біз нүкте үдеуінің бұл құраушыларымен қатты дененің айналмалы қозғалысында кездескенбіз. Оларды сондағы атауларымен қалдырып, В нүктесінің А полюсін айналғандағы центрге тартқыш және айналмалы үдеулерін аламыз:
![]() .
(20)
.
(20)
Бұл үдеулердің модулі В нүктесінің А полюсін айналғандағы центрге тартқыш үдеуі және айналмалы үдеуі деп аталады:
![]() ,
(21)
,
(21)
![]() .
(22)
.
(22)

11-сурет
(21) және
(22) өрнектерін алған кезде
![]() бұрыштық жылдамдық пен
бұрыштық жылдамдық пен
![]() бұрыштық үдеу векторларының қима
жазықтығына перпендикуляр екені
ескерілген, яғни:
бұрыштық үдеу векторларының қима
жазықтығына перпендикуляр екені
ескерілген, яғни:
![]() және
және
![]() ,
ал
,
ал
![]() .
.
Айналмалы
қозғалыстың ережесіне сәйкес
![]() векторы В нүктесінен А полюсіне қарай,
ал
векторы В нүктесінен А полюсіне қарай,
ал
![]() векторы
векторы
![]() -ға
перпендикуляр
-ға
перпендикуляр
![]() бағытымен бағытталады (10-сурет).
бағытымен бағытталады (10-сурет).
(19) бен (20) теңдіктерін ескере отырып (18) теңдеуін былай жазуға болады:
![]() ,
(23)
,
(23)
бұл теңдеу жазық-параллель қозғалыстағы дене нүктелерінің үдеулерін қосу туралы теореманы береді. Сонымен, жазық қозғалыстағы дененің кез келген нүктесінің үдеуі полюстің (А нүктесі) үдеуі мен осы нүктенің (В нүктесі) полюсті айналғандағы центрге тартқыш және айналмалы үдеулерінің геометриялық қосындысына тең екен.
В нүктесінің үдеуінің модулі мен бағыты 10-суретте келтірілген.
А нүкте қисық сызықты қозғалыс жасаған жағдайда оның үдеуі жанама және нормаль үдеулердің геометриялық қосындысы ретінде, немесе айналмалы қозғалыстағы дене нүктесі болған жағдайда айналмалы және центрге тартқыш үдеулердің геометриялық қосындысы ретінде анықталады, яғни
![]() ,
немесе
,
немесе
![]() .
.
Сонда (23) теңдеуі мына түрде жазылады:
![]() .
(24)
.
(24)
В нүктесі қисық сызықты қозғалыс жасаған жағдайда немесе айналмалы қозғалыстағы дене нүктесі болған жағдайда бұл нүктенің үдеуін мынандай қосындымен ауыстыруға болады:
![]() ,
немесе
,
немесе
![]() .
.
Сонда үдеулерді қосу туралы (24) теорема былай жазылады:
![]() .
(25)
.
(25)
В нүктенің А полюсті айналғандағы үдеуінің модулі былай анықталады:
![]() ,
(26)
,
(26)
осы үдеудің
![]() векторының АВ түзуімен құратын бұрышы
мына өрнекпен анықталады:
векторының АВ түзуімен құратын бұрышы
мына өрнекпен анықталады:
![]() .
(27)
.
(27)
Соңғы өрнектен бұрышының полюске тәуелсіз екенін көреміз.
Өзіндік бақылау сұрақтары:
-
Қатты дененің жазық-параллель қозғалысының анықтамасы мен оның негізгі кинематикалық сипаттамалары.
-
Қатты дененің жазық-параллель қозғалысының жіктелуі.
-
Жазық қозғалыстағы дененің кез келген нүктесінің жылдамдығын анықтау (жылдамдықтарды қосу туралы теорема).
-
Жазық қима нүктелерінің жылдамдықтарының проекциялары туралы теорема.
-
Жылдамдықтардың лездік центрінің (ЖЛЦ) анықтамасы және оның орнын табудың дербес жағдайлары.
-
ЖЛЦ-нің көмегімен жазық қима нүктелерінің жылдамдықтарын анықтау.
-
Жазық қима нүктелерінің үдеулерін анықтау.
-
 ,
,
 үдеулерінің шамалары мен бағыттары.
үдеулерінің шамалары мен бағыттары.
Дәріс-4. Нүктенің күрделі қозғалысы
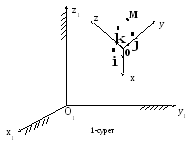
Көптеген есептерде нүктенің (дененің) қозғалысын екі немесе одан да көп координата жүйелеріне қатысты қарастыруға тура келеді. Бұл жағдайда нүкте қозғалысы күрделі қозғалыс деп аталады. Негізгі жүйені (О1x1y1z1) шартты түрде қозғалмайды, ал екінші жүйені (Oxyz) оған қатысты еркін қозғалады деп алып, нүктенің екі жүйеге қатысты қозғалысын қарастырайық (1-сурет).
Нүктенің күрделі қозғалысының негізгі анықтамалары
Келесі анықтамаларды ендіреміз.
-
М нүктесінің қозғалмайтын О1x1y1z1 координата жүйесіне қатысты қозғалысы нүктенің абсолют қозғалысы деп аталады.
-
М нүктесінің қозғалатын Oxyz координата жүйесіне қатысты қозғалысы нүктенің салыстырмалы қозғалысы деп аталады.
-
Қозғалатын Oxyz жүйенің қозғалмайтын О1x1y1z1 жүйесіне қатысты қозғалысы М нүктесі үшін тасымал қозғалыс болады.
Мұндай қозғалыстың кинематикалық сипаттамаларын анықтау кезінде қозғалатын жүйеде берілген вектордан туынды алу қажеттілігі пайда болады. Осыған байланысты вектордың абсолют және салыстырмалы туындысының ұғымдарын ендіреміз.
Қозғалатын
жүйеде берілген
![]() векторын қарастырайық. Егер
векторын қарастырайық. Егер
![]() қозғалатын координата жүйесінің бірлік
векторлары болса (1-сурет), онда
қозғалатын координата жүйесінің бірлік
векторлары болса (1-сурет), онда
![]() векторын былай жазуға болады
векторын былай жазуға болады
![]() .
(1)
.
(1)
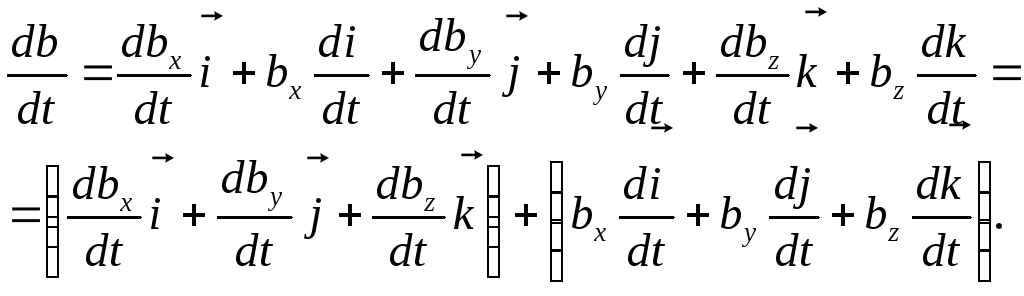
Осы
вектордың абсолют туындысын (қозғалмайтын
координата жүйесіндегі туынды) анықтау
ережесін алайық. Ол үшін қозғалатын
жүйе қозғалған кезде
![]() векторлары өз бағыттарын өзгертетінін
ескере отырып (1) теңдеуінің екі жағын
да уақыт бойынша дифференциалдаймыз:
векторлары өз бағыттарын өзгертетінін
ескере отырып (1) теңдеуінің екі жағын
да уақыт бойынша дифференциалдаймыз:
 (2)
(2)
Сонда
бірінші жақшадағы өрнек
![]() векторының қозғалатын жүйедегі туындысы
болады.
векторының қозғалатын жүйедегі туындысы
болады.
Оны
![]() деп белгілейміз де, салыстырмалы туынды
деп атаймыз, яғни
деп белгілейміз де, салыстырмалы туынды
деп атаймыз, яғни
![]() .
(3)
.
(3)
![]() векторлары
бағыттарын қозғалатын жүйе тек айналмалы
қозғалыс жасаған кезде өзгертетін
болғандықтан,
векторлары
бағыттарын қозғалатын жүйе тек айналмалы
қозғалыс жасаған кезде өзгертетін
болғандықтан,
![]() өрнегіндегі
өрнегіндегі
![]() радиус-векторды
радиус-векторды
![]() және
және
![]() -мен
алмастыра отырып мынаны аламыз
-мен
алмастыра отырып мынаны аламыз
![]() .
.
Сонда (2) теңдеуінің екінші жақшасындағы өрнекті былай түрлендіруге болады:
 (4)
(4)
мұндағы
![]() - қозғалатын жүйенің бұрыштық жылдамдығы.
- қозғалатын жүйенің бұрыштық жылдамдығы.
(3) және (4) теңдіктерін (2) теңдеуіне қойып, қозғалатын жүйеде берілген вектордың абсолют туындысы оның салыстырмалы туындысы мен қозғалатын жүйенің бұрыштық жылдамдығының осы вектормен векторлық көбейтіндісінің қосындысына тең екенін аламыз:
![]() немесе
немесе
![]() . (5)
. (5)