

ФЕДЕРАЛЬНО АГЕНСТВО ПО ОБРАЗОВАНИЮ
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕКСТИЛЬНЫЙ УНИВЕРСИТЕТ имени А.Н. КОСЫГИНА
Кафедра “Детали машин и ПТУ”
ПРИВОД ЛЕНТОЧНОГО КОНВЕЙЕРА
Пояснительная записка
к курсовому проекту по деталям машин
ДМ 05-3.00.00.ПЗ
Выполнил студент группы 53т – 07 Спирин А.С.
Руководитель проекта Палочкин С.В.
Москва – 2009
СОДЕРЖАНИЕ
|
ЗАДАНИЕ НА ПРОЕКТ………………………………………………………….. |
4 |
|
ВВЕДЕНИЕ……………………………………………………………………… |
6 |
|
1.1 Кинематическо – силовой расчёт привода………………………………. |
7 |
|
1.2 Определяем мощность и частоту вращения на выходном валу………... |
7 |
|
1.3 Определяем требуемую мощность двигателя…………………………… |
8 |
|
1.4 Определяем общее передаточное отношение…………………………… |
9 |
|
1.5 Определяем частоты вращения валов привода…………………………. |
9 |
|
1.6 Определяем мощности, передаваемые валами привода……………….. |
10 |
|
1.7 Определяем вращающие моменты на валах привода………………….. |
10 |
|
2 Проектный расчет конической зубчатой передачи………………………. |
12 |
|
2.1 Выбор материала шестерни и колеса……………………………………. |
12 |
|
2.2 Вычисление основных конструктивных параметров передачи……….. |
13 |
|
2.3 Определяем допускаемые напряжения в передачи…………………….. |
16 |
|
2.4 Проверочный расчет передачи на усталостную прочность по напряжениям изгиба зубьев ее колес………………………………………… |
20 |
|
2.5 Определяем окончательные значения размеров передачи……………... |
20 |
|
2.6 Определяем размеры заготовок шестерни и колеса…………………….. |
22 |
|
2.7 Определяем силы, действующие в зацеплении передачи……………… |
23 |
|
2.8 Проверочный расчет передачи на усталостную контактную прочность |
23 |
|
2.9 Фактическое передаточное число………………………………………... |
24 |
|
2.10 Проверочный расчет передачи на прочность зубьев при действии пиковой нагрузки……………………………………………………………… |
25 |
|
3 Расчет открытой зубчатой ременной передачи привода…………………. |
26 |
|
3.1 Определяем модуль.………………………………………………………. |
26 |
|
3.2 Число зубьев шкивов……………………………………………………… |
26 |
|
3.3 Определяем делительные диаметры шкивов……………………………. |
26 |
|
3.4 Определяем окружную скорость ремня…………………………………. |
26 |
|
3.5 Определяем ориентировочную межосевое расстояние………………… |
27 |
|
3.6 Определяем длину ремня…………………………………………………. |
27 |
|
3.7 Определяем окончательное межосевое расстояние…………………….. |
27 |
|
27 |
|
3.9 Определяем число зубьев находящиеся в зацеплении с меньшим шкивом………………………………………………………………………… |
27 |
|
3.10 Определяем скорость ремня…………………………………………….. |
28 |
|
3.11 Определяем вращающий момент на ведущем валу…………………… |
28 |
|
3.12 Определяем окружную силу……………………………………………. |
28 |
|
3.13 Определяем ширину ремня……………………………………………… |
28 |
|
3.14 Определяем допускаемую удельную силу……………………………... |
28 |
|
3.15 Определяем предварительное значение ширины ремня……………… |
28 |
|
3.16 Определяем силу предварительного натяжения ремня……………….. |
29 |
|
3.17
Определяем силу действующую на
валы |
29 |
|
3.18 Определяем размеры шкивов…………………………………………… |
29 |
|
3.19 Определяем ширину шкива……………………………………………... |
29 |
|
3.20 Определяем окружной шаг шкива…………. ……..…………………… |
29 |
|
4 Эскизное проектирование редуктора……………………………………… |
31 |
|
4.1 Выбор конструкции вала – шестерни……………………………………. |
31 |
|
4.2 Определение схемы установки подшипников и предварительный выбор их типоразмера………………………………………………………… |
33 |
|
4.3 Разработка компоновочной схемы редуктора…………………………... |
33 |
|
4.4 Определяем основные размеры элементов редуктора………………….. |
34 |
|
5 Конструирование зубчатого колеса…………………………………..……. |
38 |
|
6 Расчет шпоночных соединений зубчатых колес с валами привода……... |
39 |
|
6.1 Определяем прочность соединения……………………………………… |
40 |
|
7 Расчет на статическую прочность и выносливость тихоходного вала редуктора………………………………………………………………………. |
42 |
|
7.1 Выбор материала вала……………………………………………………….. |
42 |
|
7.2 Определяем основные реакции в опорах вала…………………………... |
44 |
|
7.3 Находим эквивалентный момент в каждом из опасных сечений 2,6,7,8,9………………………………………………………………………… |
45 |
|
7.4 Проверка статической прочности вала…………………………………... |
48 |
|
8 Расчёт на прочность подшипниковых опор валов редуктора……………. |
50 |
|
9 Конструирование подшипниковых узлов редуктора……………………... |
53 |
|
10 Конструирование корпусных деталей редуктора…………………….….. |
60 |
|
11 Выбор системы смазки редуктора и смазочных материалов…………… |
64 |
|
12 Выбор стандартной муфты привода……………………………………… |
65 |
|
13 Выбор предельных отклонений размеров, посадок, шероховатостей, допусков формы и расположения поверхностей при разработке рабочих чертежей деталей привода……………………………………………………. |
66 |
|
14 Разработка эскизной компоновки привода………………………………. |
70 |
|
15 Конструирование опорной рамы привода……………………………….. |
71 |
|
16 Краткие рекомендации по сборке редуктора………………….…………. |
72 |
|
17 Конструирование приводного барабана………………………………….. |
73 |
|
ЗАКЛЮЧЕНИЕ……………………………………………………………….. |
74 |
|
ЛИТЕРАТУРА………………………………………………………………… |
75 |
|
ПРИЛОЖЕНИЯ |
|
|
Спецификация к чертежу общего вида привода |
|
|
Спецификация к сборочному чертежу редуктора |
|
 ……………………………….
……………………………….

 ВВЕДЕНИЕ
ВВЕДЕНИЕ
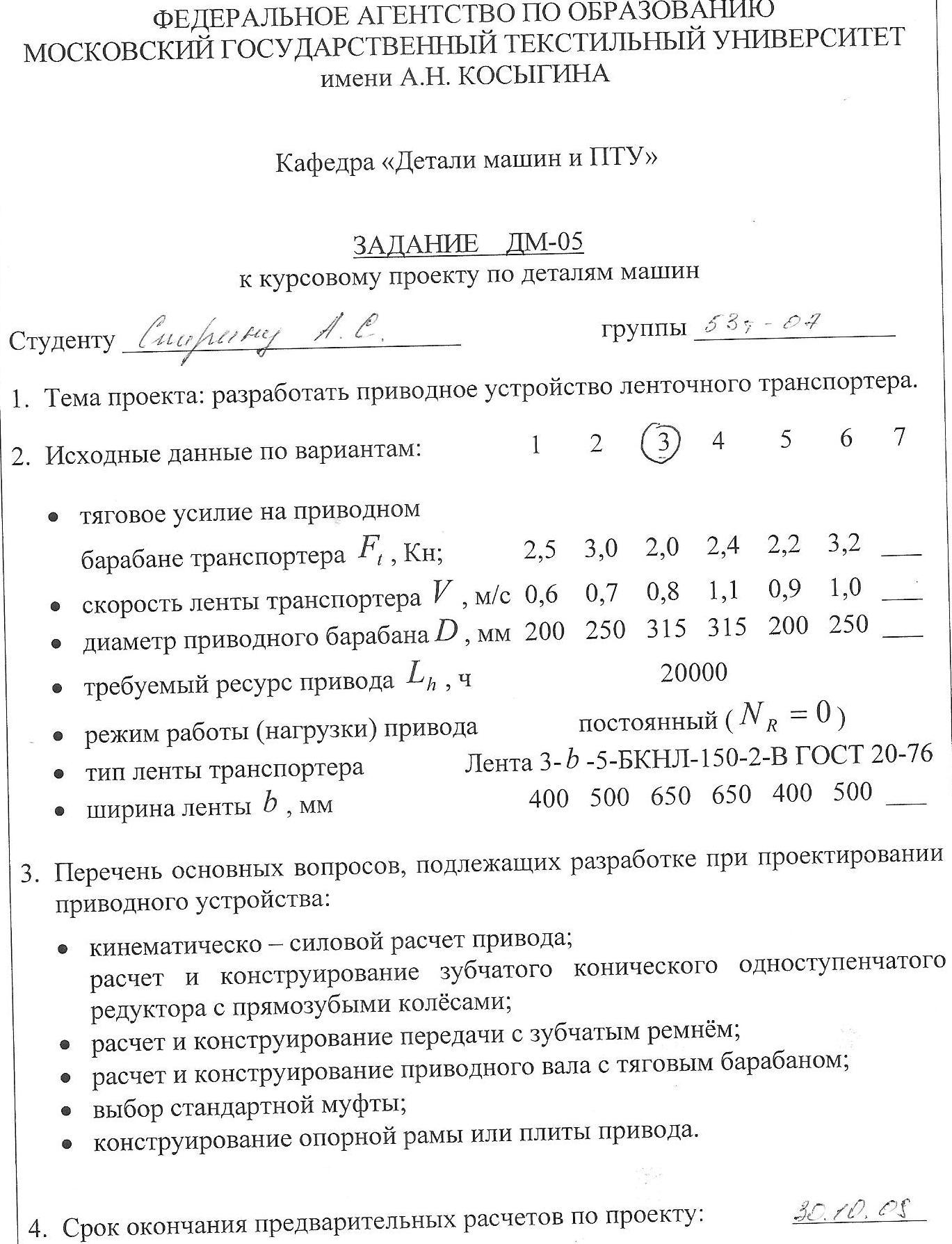
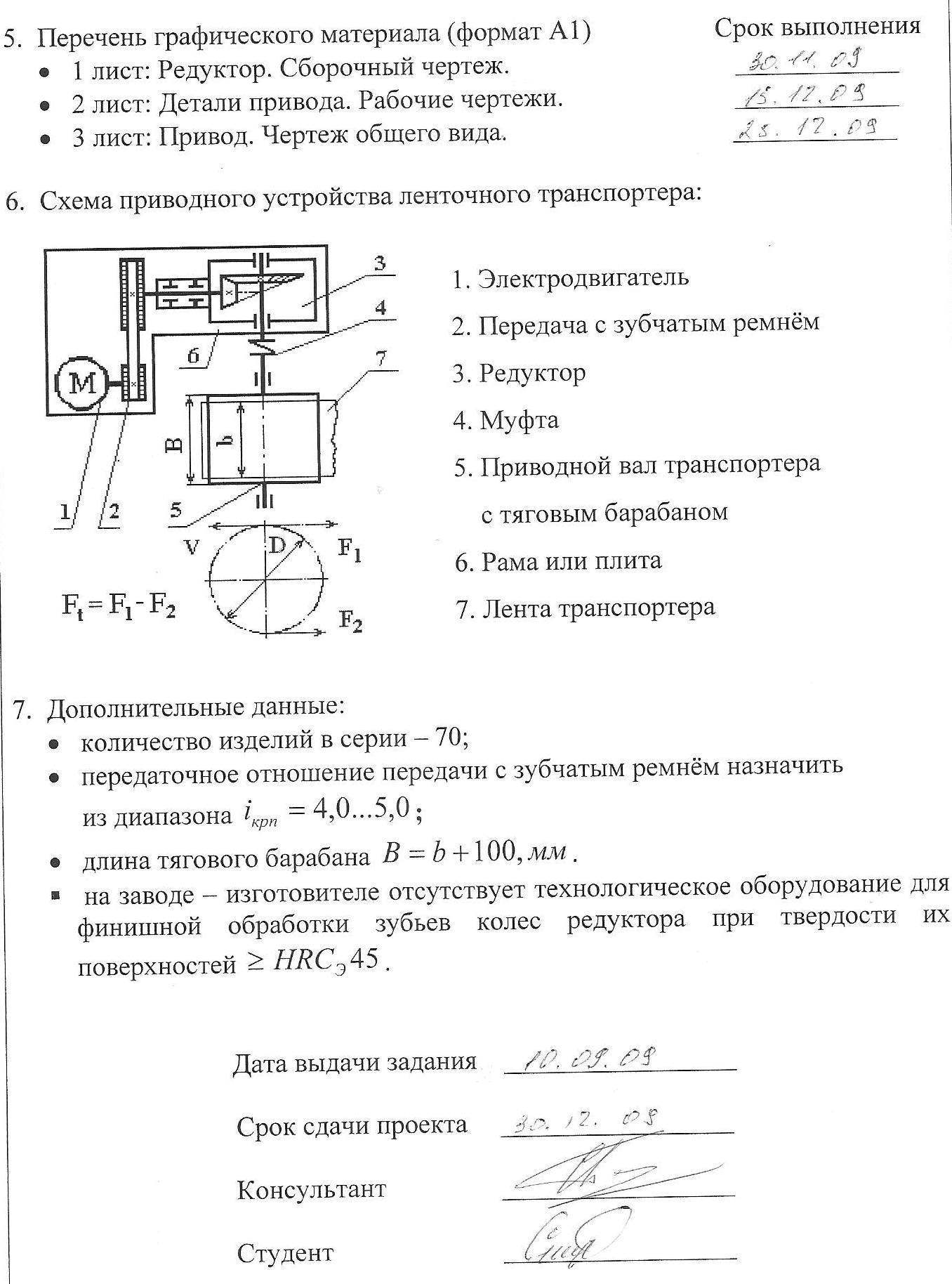
Настоящая работа посвящена проектированию привода ленточного конвейера общемашиностроительного применения, который может быть использован для механизации транспортных и складских работ на предприятиях текстильной промышленности.
Привод любой машины предназначен для передачи движения от вала двигателя к валу исполнительного звена с помощью различных механических передач. Необходимость передач в составе привода обусловлена экономической целесообразностью согласования с их помощью режимов работы двигателя и исполнительного звена. Первый характеризуется обычно большой частотой вращения вала и малым вращающим моментом, а второй имеет, как правило, обратные характеристики.
Разработанный согласно заданию на проект привод конвейера включает в себя:
–электродвигатель, преобразующий электрическую энергию в механическую
энергию вращения своего вала;
–муфту, соединяющую вал двигателя с быстроходным валом редуктора и
передающую движение с вала на вал практически без изменения его
параметров;
–конический редуктор, передающий движение от
быстроходного вала на тихоходный вал с
уменьшением частоты вращения и увеличением вращающего момента при
переходе с вала на вал;
– муфту, соединяющую тихоходный вал редуктора с выходным валом
привода и передающую движение с вала на вал практически без изменения
его параметров;
–вал выходной с тяговой звёздочкой – исполнительное звено привода,
передающее движение тяговой цепи конвейера.
Проект привода разработан на базе основных положений современной учебно-методической и справочно- технической литературы по деталям машин [1…8].
Структурно пояснительная записка состоит из ведения, основных разделов, посвященных вопросам расчета и конструирования различных узлов и деталей привода, и заключения. Приложения включают в себя спецификации к чертежу общего вида привода и к сборочным чертежам его основных узлов.
1 Кинематическо – силовой расчёт привода

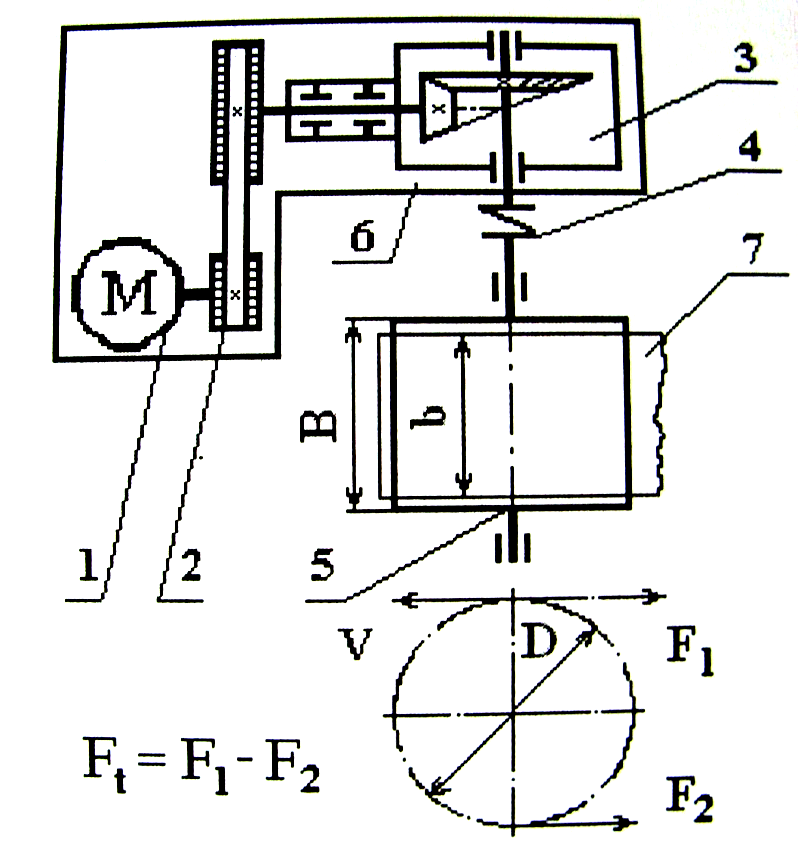
Рис. 1. Привод цепного транспортёра
1. Электродвигатель; 2. Передача с зубчатым ремнем; 3. Редуктор; 4. Муфта; 5. Приводной вал транспортёра с тяговым барабаном; 6.Плита или рама 7. Лента транспортёра
1.1. Определяем мощность и частоту вращения на выходном валу
![]() (1)
(1)
где Рвых – мощность на выходном вале привода, кВт;
Ft – тяговое усилие на приводном барабане, Н;
V – скорость ленты транспортёра, м/с
![]()
![]() (2)
(2)
где nвых – частота вращения выходного вала привода, мин-1;
D – диаметр приводного барабана, м
![]()
1.2. Определяем требуемую мощность двигателя
![]()
где Рэдтр – требуемая мощность электродвигателя, кВт;
hS – коэффициент полезного действия привода (см. [1], стр. 5)
![]() (4)
(4)
где hм – коэффициент полезного действия муфты;
hкп –коэффициент полезного действия конической передачи;
hзр – коэффициент полезного действия зубчатой ременной передачи;
hпо – коэффициент полезного действия подшипниковой опоры
![]() кп=0,95;
кп=0,95;![]()
![]() зр=0,94;
зр=0,94;
![]() м=0,98;
м=0,98;
![]() по=0,99;
по=0,99;
![]()
![]()
Предварительно выбираю электродвигатель 100L6/945
Теперь, в соответствии с данными [1], табл. 24.9, по условию (1) выбираем электродвигатель серии АИР, типоразмер 100L6, исполнение IM 1081 по ТУ 16525/564-84, стандартная мощность которого Рэд = 2,2 кВт, частота вращения вала nэд = 945 мин-1. Эскиз выбранного двигателя представлен на рис. 1. Значения его геометрических параметров сведены в табл. 1.
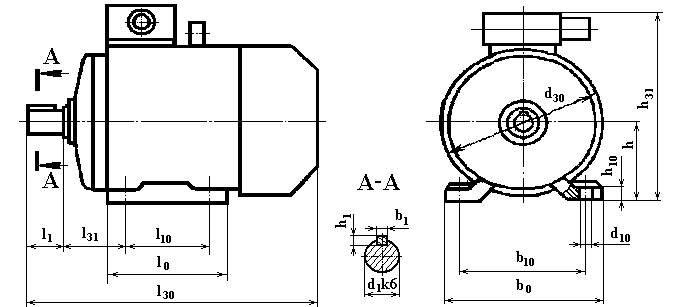
Рис. 2. Эскиз электродвигателя привод
 Таблица
1
Таблица
1
Геометрические характеристики электродвигателя, мм
|
d1 |
11 |
l30 |
b1 |
h1 |
d30 |
l10 |
l31 |
d10 |
b10 |
h |
h10 |
h31 |
|
28 |
60 |
391 |
8 |
7 |
240 |
140 |
63 |
12 |
160 |
100 |
12 |
247 |
1.3. Определяем общее передаточное отношение привода и производим его разбивку по ступеням.
![]() (5)
(5)
где nэд – частота вращения вала электродвигателя, мин-1
![]()
![]()
![]()
![]() (6)
(6)
![]()
![]()
1.4. Определяем частоты вращения валов привода
Для быстроходного:
![]() (7)
(7)
![]()
где nбыс – частота вращения быстроходного вала редуктора
для тихоходного
![]() (8)
(8)
![]()
где nтих – частота вращения тихоходного вала редуктора
nвых = nтих = 48,50.
 1.5.
Определяем мощности, передаваемые
валами привода
1.5.
Определяем мощности, передаваемые
валами привода
![]() (9)
(9)
где Ртих – мощность, передаваемая тихоходным валом редуктора, кВт
![]()
где Pбыст– мощность, передаваемая быстроходным валом редуктора, кВт
![]() (10)
(10)
![]()
![]() (11)
(11)
где Рэд – мощность, передаваемая валом электродвигателя, кВт
![]()
1.6. Определяем вращающие моменты на валах привода
![]() (12)
(12)
где Тэд – вращающий момент на валу электродвигателя, Н×м
![]()
![]() (13)
(13)
где Тбыст – вращающий момент на быстроходном валу редуктора, Н×м
![]()
![]() (14)
(14)
где Ттих – вращающий момент на тихоходном вале редуктора, Н×м
![]()
![]()
![]() (15)
(15)
где Твых – вращающий момент на выходном вале привода, Н×м
![]()
Проверяем полученное значение Твых:
![]() (16)
(16)
![]() .
.