

Структура модели химико-технологических систем непрерывного действия
1.1. Общая характеристика
Химико-технологическую систему (ХТС) непрерывного действия образуют взаимодействующие технологические аппараты, работающие в непрерывном режиме. В аппаратах протекают непрерывные технологические процессы, а взаимодействия аппаратов заключаются в непрерывном транспорте массы из одних аппаратов в другие и их взаимном обмене энергией, чаще всего — в форме теплоты. Нормальным режимом работы аппаратов является стационарный, при котором значения параметров технологических процессов не изменяются во времени. Изменения последних возможны только в периоды вывода системы на рабочий режим, ее останова или в предаварийных режимах. Структура системы, под которой понимается совокупность взаимодействий аппаратов, остается неизменной в течение всего срока работы системы.

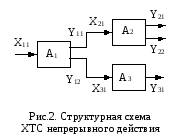
Сформируем модель ХТС, структурная схема которой изображена на рис.2.
 ,
выходные —
,
выходные — ,
а состояния аппаратов —
,
а состояния аппаратов — .
Первый индекс у идентификаторов
.
Первый индекс у идентификаторов и
и обозначает
номер аппарата, второй — номер потока.
обозначает
номер аппарата, второй — номер потока.
Тогда структуру модели ХТС, изображенной на рис.2, можно представить в виде, показанном на рис.3.

Математические модели технологических аппаратов связывают входы, выходы и состояния аппаратов и представляют собой совместные системы уравнений материального и энергетического (обычно - теплового) балансов и уравнений, выражающих физико-химические законы.
Математическая
модель структуры
ХТС отображает взаимодействия аппаратов.
В символическом виде можно представить
модель
 системыS,
изображенной на рис.2, следующим образом:
системыS,
изображенной на рис.2, следующим образом:
 ,
,
где











где
 — известные векторные функции (иногда
— функционалы или функциональные
операторы), а символы
— известные векторные функции (иногда
— функционалы или функциональные
операторы), а символы обозначают соответственно операции
объединения и пересечения множеств.
обозначают соответственно операции
объединения и пересечения множеств.
При нормальном режиме работы аппаратов значения входных переменных и переменных состояния аппаратов во времени не изменяются; тогда модель MS системы S отображает статический режим ее работы и называется статической моделью системы. Если входные переменные или переменные состояния или те и другие являются функциями времени, то модель MS системы S отображает переходные, режимы ее работы и называется динамической моделью системы. Если выход системы или ее подсистем однозначно определяется ее входом и состоянием, то система называется детерминированной; в противном случае — индетерминированной. Индетерминизм системы часто обусловлен случайным характером изменения ее входов или состояний; тогда говорят, что входы системы или сама система имеет стохастическую природу. Для стохастических систем можно получить функциональную зависимость некоторых средних характеристик выхода от входа и состояния.
Важной характеристикой систем непрерывного действия является тип их структуры. По этому признаку различают разомкнутые и замкнутые системы.
В разомкнутых системах входы следующих по ходу технологического потока аппаратов являются выходами только предыдущих аппаратов. В замкнутых системах, то есть содержащих рециклы, некоторые входы некоторых предыдущих аппаратов являются некоторыми выходами некоторых последующих. В системах непрерывного действия рециклические потоки присутствуют довольно часто, так как получить достаточно высокую степень завершенности какого-либо технологического процесса (например, конверсию исходного реагента) можно, либо увеличив размеры аппарата, либо организовав рецикл, причем второму способу отдается явное предпочтение.
Разомкнутые и замкнутые системы могут иметь последовательную или разветвленную структуру. У систем с последовательной структурой входы произвольного аппарата являются выходами непосредственно предшествующего ему аппарата, а в системах с разветвленной структурой связи между аппаратами более сложные.
Тип структуры системы имеет принципиальное значение, так как непосредственно влияет на метод ее расчета. В разомкнутых системах расчет аппаратов возможен непосредственно, так как к моменту расчета произвольного аппарата известны все его входы. Трудность расчета замкнутых систем состоит в том, что для расчета некоторых предшествующих аппаратов необходимо знать выходы некоторых последующих, а для расчета этих последних требуется знать выходы некоторых предшествующих. Поэтому расчету систем, содержащих рециклы, должна предшествовать процедура их преобразования в эквивалентные разомкнутые. Разомкнутая система S’ называется системой, эквивалентной замкнутой системе S, если при всех значениях входов обе системы имеют одинаковые значения выходов.