

3341 ЭИ
.pdf6.2.Характеристики тягового двигателя
1)Номинальный ток. Определяется по (3.1) с учетом (2.5) и табл. 3.1.
2)Скорость номинального режима. Определяется по (3.3) с учетом (2.3).
3)Силатягинаободеколесавноминальномрежиме. Вычисляетсяпо(3.2) сучетом(3.3).
4)Параметры обмоток двигателя. Определяется rд из (3.4), а затем rа, rдп, rгп в соответствии с табл. 3.2.
5)Удельная ЭДС номинального режима. Определяется СvФ по (3.6).
6)Расчет и построение характеристик. Привести примеры расчета I, СvФ, V, F и составить табл. 3.3 в абсолютных величинах. Построить характеристики F(I), CvФ(I) и V(I).
6.3.Характеристики электровоза
1)Скоростные характеристики при перегруппировках двигателей. На основании (3.6) и (3.7) заполнить табл. 3.4 и построить характеристики V = f(I) для полного магнитного поля (см. рис. 3.2).
2)Характеристики ослабленного возбуждения. Определить значения β для каждой ступени ослабления возбуждения. Построить скоростные характеристики для ослабленного магнитного поля (см. рис. 3.2).
3)Характеристики силы тяги двигателя (электровоза) от тока для полного и ослабленного поля. На основании (3.10) заполнить табл. 3.5 и построить характеристики
(см. рис. 3.3).
6.4.Расчет и выбор пусковых резисторов, построение пусковой диаграммы
1)Ограничение пускового режима по условиям сцепления колеса с рельсом. Расчет данных для табл. 4.1 проводится на основании (4.1) Пo данным табл. 4.1 на рис. 3.2 нанести ограничения по сцеплению для полного и ослабленного возбуждений.
2)Расчет пускового резистора и выбор его ступеней. В соответствии с (4.3) вычислить сопротивление первой маневровой позиции. Пo количеству двигателей (см. раздел 2) с учетом Приложения выбрать схему пускового резистора. Рассчитать, в соответствии с (4.4) и (4.5), сопротивления секций резистора и сопротивления пускового резистора на каждой позиции.
3)Расчет и построение пусковых характеристик и диаграммы. В соответствии с (4.6) рассчитать с использованием ЭВМ скоростные характеристики Vi = f(I) для всех позиций регулирования скорости, за исключением первых позиций с использованием ОП, для которых расчеты выполнить вручную. На основании расчетов построить скоростные характеристики (см. рис. 4.1). Рекомендуемые масштабы: тока mI = 5 А/мм; скорости mv = 0,5 км/ч/мм. Здесь же построить скоростные характеристики ослабленного возбуждения (перенести с рис. 3.2) и нанести ограничения по сцеплению. Построить пусковую диаграмму. Интервалы изменения скорости на маневровых и дополнительных позициях выбрать самостоятельно. Проверить количество выбранных позиций по коэффициенту неравномерности пуска по току с условием, что для полного возбуждения
31
KHI = 0,07 0,08, а для ослабленного поля – см. (3.9). При использовании формулы (3.9) для полного магнитного поля значения Imax и Imin взять из рис. 4.1.
6.5.Расчет и выбор параметров системы рекуперативного торможения
1)Выбор схемы. На основе рис. 5.1 с учетом количества двигателей на проектируемом электровозе изобразить схему проектируемого электровоза в тормозном режиме на СПсоединении (для тех, у кого номер студенческого билета заканчивается на нечетную цифру) илинаП-соединении(причетнойпоследнейцифрестуденческого билета).
2)Расчет количества позиций регулирования тормозного режима. В соответствии с (5.11) рассчитать Eгmax, нанести его на рис. 5.2 и определить количество позиций регулирования.
3)Тормозные характеристики. В соответствии с п. 5.3 выполнить расчеты зависимостей В = f(V) и V = f(Iр) и заполнить табл. 5.1 (принимая во внимание расчеты в предыдущем пункте). Привести примеры расчета. Построить зависимости В = f(V) и V = f(Iр), как это показано на рис. 5.3. Выбрать масштабы так, чтобы тормозные и скоростные характеристики заняли лист формата А4, развернутый по часовой стрелке на 1/4 оборота.
4)Ограничение тормозного режима.
-Ограничение по скорости. Указать в тексте ограничение по скорости и нанести его на рис. 5.3.
-Ограничение по сцеплению колеса с рельсом. В соответствии с п. 5.4 рассчитать зависимость В = f(V) дать пример расчета, заполнить табл. 5.2 и нанести зависимость
V = f(Iр) на рис. 5.3.
-Ограничение по условиям коммутации. В соответствии с п. 5.4.4 выполнить расчеты, привести примеры расчета и заполнить табл. 5.3. Нанести полученные ограничения на рис. 5.3 так, как это показано на рис. 5.3.
Заключение
Привести параметры спроектированного электровоза:
-род службы;
-род тока;
-напряжение в контактной сети, В;
-формула ходовой части;
-ширина колеи, мм;
-номинальная мощность, кВт;
-сила тяги в номинальном режиме, кН;
-скорость электровоза в номинальном режиме, км/ч;
-тормозное усилие при номинальной скорости, кН;
-конструкционная скорость, км/ч.
32
ВОПРОСЫ ДЛЯ ПОДГОТОВКИ К ВЫПОЛНЕНИЮ И ЗАЩИТЕ ЧАСТИ 1 КУРСОВОГО ПРОЕКТА (ЭЛЕКТРОВОЗ ПОСТОЯННОГО ТОКА)
1.От чего зависит мощность, которой должен обладать электровоз?
2.Чем определяется сила тяги проектируемого электровоза для заданного участка
пути?
3.От чего зависит колесная формула электровоза?
4.Как определить номинальную мощность тягового двигателя?
5.Чем определяется номинальный ток тягового двигателя?
6.Какой ток называют номинальным?
7.Что характеризует номинальный режим электровоза?
8.От чего зависит номинальная скорость электровоза?
9.Что называют тяговой характеристикой электровоза?
10.Что называют скоростной характеристикой электровоза?
11.От каких параметров тягового двигателя зависит скорость электровоза?
12.От каких параметров тягового двигателя зависит сила тяги электровоза?
13.Что называют коэффициентом ослабления поля тягового двигателя? В каких пределах он может изменяться?
14.От чего зависит количество ступеней регулирования скорости на электровозе постоянного тока?
15.Каковы ограничения характеристик силы тяги?
16.Каково назначение дополнительных и маневровых ступеней регулирования скорости электровоза?
17.Какие способы перегруппировки тяговых двигателей Вы знаете?
18.Какой способ возбуждения может быть использован при рекуперативном торможении?
19.Из каких основных элементов состоит силовая цепь рекуперативного тормоза?
20.Что называют тормозной характеристикой?
21.От каких параметров двигателя зависит тормозное усилие электровоза при электрическом торможении?
22.От чего зависит скорость электровоза в режиме рекуперации?
23.Назовите ограничения характеристик тормозного режима.
24.Будьте готовы рассказать о том, как получены любые численные величины в пояснительной записке Вашего проекта.
25.Умейте рассказать как построены графики и рисунки в Вашем проекте.
33
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1.Проектирование систем управления электроподвижным составом / под ред. Н.А. Ротанова. – М.: Транспорт, 1986. – 327 с.
2.Проектирование систем управления подвижным составом электрических железных дорог / под ред. Д.Д. Захарченко. – М.: Транспорт, 1964. – 351 с.
3.Плакс А.В. Системы управления электрическим подвижным составом : учебник для вузов ж.-д. транспорта. – М.: Маршрут, 2005. – 360 с.
4.Тихменев Б.Н. Подвижной состав электрифицированных железных дорог / Б.Н. Тихменев, Л.М. Трахтман. – 4-е изд., перераб. и допол. – М.: Транспорт, 1991. – 352 с.
5.Галкин В.Г. Системы управления электрическим подвижным составом / В.Г. Галкин, Ю.А. Усманов, А.А. Бакланов. – Омск: ОмИИТ, 1977. – 38 с.
6.Галкин В.Г. Электрическое оборудование подвижного состава. – Омск: ОмИИТ, 1968. – 36 с.
7.Правила тяговых расчетов для поездной работы. – М.: Транспорт, 1985. – 320 с.
8.Привалов В.В. Краткое руководство по курсовому проектированию электровозов постоянного тока / В.В. Привалов, С.И. Осипов. – М.: ВЗИИТ, 1962. – 265 с.
9.Калинин В.К. Электровозы и электропоезда. – М.: Транспорт, 1991. – 480 с.
10.Чебовский О.Г. Силовые полупроводниковые приборы : справочник / О.Г. Чебовский, Л.Г. Моисеев, Р.П. Недошивин. – М.: Энергомашиздат, 1985. – 400 с.
11.Привалов В.В. Системы управления электроподвижным составом / В.В. Привалов, А.А. Аватков. – М.: ВЗИИТ, 1981. – 28 с.
12.Электровоз ВЛ10 : руководство по эксплуатации / под ред. О.А. Кикнадзе. – М.:
Транспорт, 1975. – 520 с.
13.Привалов В.В. Системы управления электрическим подвижным составом : методические указания к выполнению курсового проекта / В.В. Привалов, А.А. Аватков.
–М.: ВЗИИТ, 1987. – 23 с.
14.Папченков С.И. Электрические аппараты и схемы тягового подвижного состава.
–М.: Желдориздат, 2002. – 603 с.
34
ЧАСТЬ 2. ЭЛЕКТРОВОЗ ПЕРЕМЕННОГО ТОКА
1. ЗАДАНИЕ И ИСХОДНЫЕ ДАННЫЕ
Проект предусматривает расчет и выбор основных схемных решений, характеристик и других параметров грузового электровоза переменного тока с плавным многозонным регулированием напряжения на тяговых двигателях и электрическим торможением.
Исходные данные выбираются в соответствии с двумя последними цифрами студенческого билета (учебного шифра) из табл. 1. Для всех вариантов нормальное возбуждение соответствует β0 = 0,96. Три ступени ослабления поля соответствуют
β1=0,7; β2 = 0,52 и β3 =0,43.
|
|
|
|
|
|
|
|
Таблица 1 |
||
|
|
Исходные данные |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Номинальная мощность тягового двигателя РДН, кВт |
700 |
750 |
800 |
850 |
900 |
|
950 |
|
||
Нагрузка на ось П, кН |
|
220 |
225 |
230 |
235 |
240 |
|
245 |
|
|
Количество осей |
|
|
6 |
8 |
12 |
6 |
8 |
|
12 |
|
Количество зон регулирования |
|
2 |
3 |
4 |
2 |
3 |
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Вид торможения |
|
|
рек |
рез |
рек |
рез |
рек |
|
рез |
|
Угол запаса δ , эл. град. |
|
20 |
– |
25 |
– |
30 |
|
– |
|
|
Номинальная |
Напряжение |
Номинальное |
|
|
|
|
|
|
|
|
скорость VН, |
короткого |
напряжение |
Последние цифры учебного шифра |
|
||||||
км/ч |
замыкания UК , % |
UДН , В |
|
|
|
|
|
|
|
|
50 |
10 |
900 |
01 |
02 |
03 |
04 |
05 |
|
06 |
|
54 |
12 |
1000 |
19 |
20 |
21 |
22 |
23 |
|
24 |
|
58 |
14 |
1100 |
37 |
38 |
39 |
40 |
41 |
|
42 |
|
62 |
16 |
1200 |
55 |
56 |
57 |
58 |
59 |
|
60 |
|
50 |
11 |
1300 |
73 |
74 |
75 |
76 |
77 |
|
78 |
|
54 |
13 |
900 |
85 |
86 |
87 |
88 |
89 |
|
90 |
|
58 |
15 |
1000 |
12 |
11 |
10 |
09 |
08 |
|
07 |
|
62 |
10 |
1100 |
30 |
29 |
28 |
27 |
26 |
|
25 |
|
50 |
12 |
1200 |
48 |
47 |
46 |
45 |
44 |
|
43 |
|
54 |
14 |
1300 |
66 |
65 |
64 |
63 |
62 |
|
61 |
|
58 |
16 |
900 |
84 |
83 |
82 |
81 |
80 |
|
79 |
|
62 |
11 |
1000 |
96 |
95 |
94 |
93 |
92 |
|
91 |
|
50 |
13 |
1100 |
– |
– |
97 |
98 |
99 |
|
00 |
|
54 |
15 |
1200 |
13 |
14 |
15 |
16 |
17 |
|
18 |
|
58 |
10 |
1300 |
31 |
32 |
33 |
34 |
35 |
|
36 |
|
62 |
12 |
900 |
49 |
50 |
51 |
52 |
53 |
|
54 |
|
50 |
14 |
1000 |
67 |
68 |
69 |
70 |
71 |
|
72 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
35 |
|
|
|
|
|
|
|
|
2. ХАРАКТЕРИСТИКИ И НЕКОТОРЫЕ ПАРАМЕТРЫ ТЯГОВОГО ДВИГАТЕЛЯ ПРИ НОМИНАЛЬНОМ НАПРЯЖЕНИИ
Для проектирования системы управления электровозом и расчета его тяговотормозных характеристик необходимы следующие параметры тяговых двигателей: номинальное напряжение UДН, номинальный ток IДН, коэффициент полезного действия ηдн, сопротивление обмоток двигателя и его составлявших: rа – якоря, rдп – дополнительных полюсов, rко – компенсационной обмотки, rгп – главных полюсов [1]. Кроме этого, необходимы характеристики: скоростная V(I), силы тяги F(I) и нагрузочная СVФ(IВ).
Поскольку двигатель задан лишь величинами мощности РДН и номинального напряжения UДН , то его параметры определяют на основе метода подобия [2], где за основу принимают параметры номинального режима.
Номинальный ток определяется из выражения, А:
|
P |
103 |
|
|
IДН = |
ДН |
|
, |
(2.1) |
|
|
|||
|
UДН ηдн |
|
||
где РДН – номинальная мощность двигателя (см. задание), кВт; UДН – номинальное напряжение двигателя (см. задание), В;
ηдн = 0,915 – коэффициент полезного действия двигателя в номинальном режиме [3].
Сила тяги на ободе колеса в номинальном режиме, кН, находится как
F = |
3,6 PДНηзп |
, |
(2.2) |
|
|||
КН |
VН |
|
|
|
|
|
где VН – скорость электровоза в номинальном режиме (cм. задание), км/ч; ηзп = 0,975 – коэффициент полезного действия зубчатой передачи [3].
Суммарное сопротивление обмоток двигателя, Ом, определяется из выражения
rд = |
0,04 UДН |
(2.3) |
||
I |
ДН |
|||
|
|
|||
и распределяется по элементам цепи двигателя в соответствии с табл. 2.1 [2].
Для построения нагрузочной характеристики вычисляют для номинального режима, В/(км/ч)
СVФН
где UДН и VН – см. задание; IДН – см. (2.1);
rд – см. (2.3).
= |
UДН − IДНrд |
, |
(2.4) |
|
|||
|
VН |
|
|
36
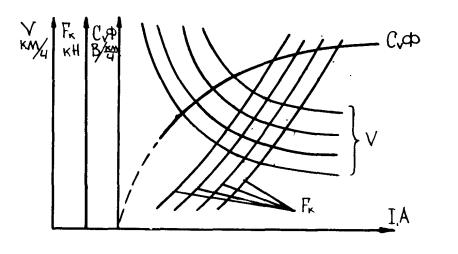
Таблица 2.1
Сопротивления отдельных элементов двигателя в долях от суммарного
Обмотка двигателя |
Сопротивление |
Якорь , rа |
0,4rд |
Дополнительные полюса , rдп |
0,1rд |
Главные полюса , rгп |
0,25rд / β0 |
Компенсационная обмотка , rко |
0,25rд |
В соответствии с методом аналогий [2], характеристики двигателя рассчитываются на основе относительных характеристик, приведенных в табл. 2.2 [4].
Таблица 2.2
Расчетные значения относительных характеристик тягового двигателя, приведенных к ободу колеса, в долях от параметров номинального режима
Ток |
Скорость движения |
|
|
Сила тяги |
|
Удельная |
||||
двига- |
нормаль- |
ослабленное поле β |
нормаль- |
ослабленное поле β |
ЭДС |
|||||
теля |
ное поле |
0,70 |
0,52 |
|
0,43 |
ное поле |
0,70 |
0,52 |
0,43 |
СVФ/СVФН |
IД/IДН |
β0 = 0,96 |
|
|
|
|
β0 = 0,96 |
|
|
|
|
0,2 |
2,06 |
– |
– |
|
– |
0,06 |
– |
– |
– |
0,59 |
0,5 |
1,40 |
1,61 |
1,98 |
|
– |
0,37 |
0,31 |
0,25 |
0,20 |
0,76 |
0,8 |
1,10 |
1,24 |
1,40 |
|
1,65 |
0,75 |
0,66 |
0,58 |
0,51 |
0,91 |
1,0 |
1,00 |
1,10 |
1,25 |
|
1,40 |
1,00 |
0,91 |
0,82 |
0,74 |
1,00 |
1,3 |
0,92 |
1,00 |
1,10 |
|
1,20 |
1,41 |
1,30 |
1,19 |
1,10 |
1,07 |
1,6 |
0,85 |
0,93 |
1,01 |
|
1,08 |
1,81 |
1,68 |
1,57 |
1,45 |
1,14 |
1,9 |
0,80 |
0,88 |
0,95 |
|
1,02 |
2,21 |
2,07 |
1,94 |
1,80 |
1,18 |
При переходе от относительных значений к абсолютным в табл. 2.2 в те ее колонки, где соотношение равно 1,0; записать данные, полученные в (2.1), (2.2), (2.4) и из задания. Остальные значения в табл. 2.2 получают как произведения записанных первоначально данных на соответствующие коэффициенты. Например, если по формуле (2.1) получено IДН = 1000 A, то в колонку 1 строка 1 запишем: 0,2·1000 A = 200 A. По данным табл. 2.2 в абсолютных величинах строят зависимости V = f (I) и FК = f (I) для нормального поля и трех ступеней ослабленного поля, а также СVФ =f(I).
Вид характеристик показан на рис. 2.1.
НП ОПmax
ОПmax
НП
Рис. 2.1. Характеристики двигателя
37
3.СХЕМА СИЛОВЫХ ЦЕПЕЙ ЭЛЕКТРОВОЗА
Всоответствии с заданием проектируемый электровоз должен иметь плавное многозонное регулирование выпрямленного напряжения на тяговых двигателях. Это предусматривает наличие на электровозе как минимум одного трансформатора и управляемого выпрямителя.
Количество тяговых трансформаторов зависит от числа секций электровоза, которое, в свою очередь, определяется количеством тяговых двигателей. Может быть рекомендовано такое распределение двигателей по секциям электровоза, как показано в табл. 3.1.
Таблица 3.1
Возможное распределение тяговых двигателей по секциям электровоза
Количество тяговых |
Количество секций |
Количество двигателей |
двигателей электровоза |
электровоза |
в одной секции |
|
|
|
6 |
1 |
6 |
8 |
2 |
4 |
12 |
2 |
6 |
12 |
3 |
4 |
|
|
|
Всоответствии с заданием и табл. 3.1 выбирается количество секций электровоза и количество двигателей, приходящихся на одну секцию.
Количество тяговых трансформаторов, как правило, соответствует количеству секций, а выпрямительных установок может быть от двух до числа, соответствующего количеству тяговых двигателей.
Если количество выпрямительных установок меньше количества тяговых двигателей, то такая компоновка называется групповой. При этом электровоз менее склонен к разносному буксованию, чем при индивидуальной компоновке, в которой количество двигателей и выпрямительных установок одинаково. Поэтому для грузовых электровозов предпочтительна групповая компоновка, принципиальная схема которой показана на рис. 3.1 [5] (один из вариантов). Схемы восьмиосных и двенадцатиосных электровозов строятся по аналогии с рис. 3.1 [5].
Плавное многозонное регулирование напряжения может быть выполнено в схемах, где имеется несколько вторичных обмоток трансформатора, или одна вторичная обмотка трансформатора секционирована [6].
Вобоих случаях отдельные вторичные обмотки трансформатора или секции одной вторичной обмотки могут быть выполнены с неодинаковым количеством витков, как сделано, например, на электровозе ВЛ80Р [6] (рис. 3.3).
К тому же плавное многозонное регулирование напряжения может осуществляться как
втиристорно-контакторных схемах, так и в бесконтактных схемах [6] (рис. 3.2 и рис. 3.3).
38
Схемы с тиристорно-контакторным регулированием реализуют межступенчатое плавное регулирование напряжения, в которых выпрямительная установка может быть выполнена в диодно-тиристорном варианте, однако такая схема не может быть использована в рекуперативном режиме.
Бесконтактные схемы на тиристорах обеспечивают плавное многозонное регулирование напряжения и могут быть использованы в режиме рекуперативного торможения. В этом случае преобразователь должен обеспечивать как выпрямительный, так и инверторный режимы, т. е. выполняется как выпрямительно-инверторный (ВИП) [6].
Вкурсовом проекте предлагается для электровоза с резистивным торможением использовать схему с плавным межступенчатым регулированием и вентильным переходом, показанную на рис. 3.2.
Для электровоза с рекуперативным торможением предлагается использовать бесконтактную схему с плавным многозонным регулированием напряжения, показанную на рис. 3.3.
Врежиме электрического торможения обмотки возбуждения тяговых двигателей включаются по схеме с независимым возбуждением и питаются дополнительным управляемым выпрямителем, который может быть выполнен, например, по схеме с нулевым выводом. Такая схема для восьмиосного электровоза показана на рис. 3.4.
Однако для электровоза с резистивным торможением использование схемы с дополнительным управляемым выпрямителем не является рациональным, так как в режиме резистивного тормоза тяговая выпрямительная установка по прямому назначению не используется и ее можно применить для питания обмоток возбуждения. Это можно сделать с помощью контакторов, выполняющих переключения из тягового в тормозной режим. Например, для шестиосного локомотива из схемы, представленной на рис. 3.2, можно получить схему, представленную на рис. 3.1. При этом количество дополнительных контакторов должно быть минимальным. Они не должны дублировать друг друга.
Схема должна предусматривать отделение цепи якорей двигателей от цепи обмоток возбуждения. Обмотки якорей двигателей могут включаться последовательно на общий резистор, что обеспечивает равенство нагрузок двигателей в тормозном режиме, однако при этом повышается склонность колесных пар к юзу [7]. Параллельное соединение якорей двигателей приводит к большой неравномерности токов в них, что неустранимо без применения специальных мер [7].
На электровозе ВЛ80Т применена схема, где обмотка якоря каждого двигателя замкнута на отдельный тормозной резистор (рис. 3.1). Аналогичная схема рекомендуется для использования в проекте.
39

Рис. 3.1. Принципиальная схема групповой компоновки выпрямительно-инверторных установок и тяговых двигателей шестиосного электровоза (для любого типа торможения)
|
|
|
b |
|
|
c |
|
d |
|
|
|
e |
|
f |
|||||
a |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
D |
||||||||||||
|
|
A |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
СР
Рис. 3.2. Принципиальная схема ЭПС с плавным межступенчатым регулированием напряжения и вентильным переходом (только для резистивного торможения)
Рис. 3.3. Принципиальная схема электровоза с бесконтактным плавным регулированием напряжения (только для рекуперативного торможения)
40