

Лабораторная работа №4 Выбор промышленного робота
В соответствии с выбранной схемой РТК и максимальной массой заготовки/детали равной 65 грамм, был выбран промышленный робот модель КМ 0,63Ц.42.12, внешний вид и основные характеристики которого приведены ниже. Основное назначение выбранного робота – это обслуживание однокривошипных прессов открытых простого действия усилием до 100 кН.
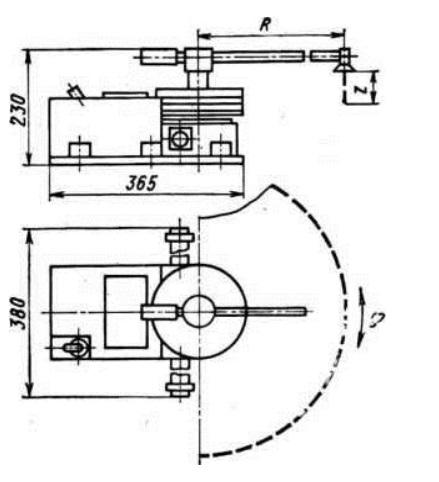
Рисунок 9 – Промышленный робот КМ 0,63Ц.42.12
Таблица 3 – Основные характеристики промышленного робота
|
Номинальная грузоподъемность, кг |
0,63 |
|
Число степеней подвижности |
2 |
|
Число рук/захватов на руку |
1/1 |
|
Тип привода |
Пневматический |
|
Устройство управления |
Цикловое |
|
Число программируемых координат |
2 |
|
Способ программируемых перемещений |
По упорам |
|
Погрешность позиционирования, мм |
|
|
Максимальный радиус зоны обслуживания, мм |
350 |
|
Масса, кг |
20 |
|
Линейное перемещение z, мм |
20 |
|
Угловое
перемещение
|
180 |
 0,1
0,1 ,
,
Лабораторная работа №5 Выбор вспомогательного оборудования
Выбор подающего устройства РТК
Для полноценной работы РТК необходимо устройство подачи заготовок под схват промышленного робота, учитывая размеры заготовки, наиболее рациональным является применение загрузочного устройства с поворотным столом.
Загрузочное устройство (рис 11) предназначено для подачи под схват робота плоских заготовок и представляет собой конструкцию, на основании 5 которой смонтированы: поворотный стол 12 с пневмоцилиндром 6, фиксирующие устройства 3 и 9, устройство для подъема заготовок 4, система электроуправляемых золотников 13 и устройство для поддержания заданного уровня заготовок 10.
Поворотный стол представляет собой механизм, состоящий из неподвижной оси 8, на которой в подшипниках закреплен вращающийся стол 1 с прорезями и поворотное устройство. На верхней части стола смонтированы магазины кассет 2, в которые укладываются заготовки. Поворот стола осуществляется пневмоцилиндром 6 двухстороннего действия, перемещающим кулису 7, которая прикреплена к стакану 11 вращающегося стола с помощью муфту свободного хода 12. Фиксация положения стола осуществляется с помощью храпового колеса и подпружиненного фиксирующего устройства 9.
Устройство для подачи заготовок состоит из механизма подъема и следящей фотоэлектронной системы 10. Механизм подъема представляет собой пневмоцилиндр, воздух в который для поддержания заданного уровня заготовок подается по сигналу фотоэлектронных датчиков, изменяющих давление и расход подаваемого воздуха с помощью системы электроуправления золотников 13. При снятии верхней заготовки из магазина высота стопы уменьшается и фотодатчики подают сигнал на подачу воздуха в пневмоцилиндр для поддержания заданного уровня.
При освобождении магазина фотодатчик подает сигнал на опускание пневмоцилиндра подъема, а затем и на поворот вращающегося стола на один шаг.

Рисунок 10 – Принципиальная схема загрузочного устройства
1 – вращающийся стол; 2 – магазины кассет; 3,9 – фиксирующие устройства; 4 – устройства для подъема заготовок; 5 – основание; 6 – пневмоцилиндр; 7 – кулиса; 8 – неподвижная ось; 10 – фотоэлектронная система; 11 – стакан; 12 –муфта; 13 – золотники.
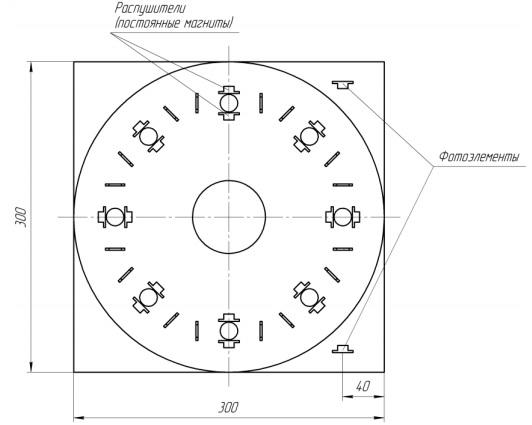
Рисунок 11 – Загрузочное устройство
Таблица 4 – характеристики загрузочного устройства
|
Число магазинов, шт |
8 |
|
Высота стопы заготовок, мм |
150 |
|
Число заготовок в стопе, шт |
100 |
|
Рабочее давление воздуха, Мпа |
1,35-0,6 |
|
Режим работы |
Наладочный, автоматизированный |
|
Напряжение питания, В |
220 |
|
Потребляемая мощность, Вт |
60 |
|
Габариты |
300х300х410 |