

1 Описание функциональной структуры системы тиристорного лектропривода
Тиристорный коммутатор в
цепи статора укомплектован пятью
однофазными коммутирующими элементами
(КТЭ), каждый из которых состоит из
двух встречно-параллельно включенных
тиристоров (рисунок 1.1) или из симисторов
(рисунок 1.2). Схема соединения КТЭ
дает возможность осуществления реверса
(работают первый, старой, третий или
второй, четвертый, пятый КТЭ) и режима
динамического торможения электродвигателя,
при котором последний подключается
к сети переменного тока через
двухполупериодный мостовой выпрямитель,
составленный тиристорами VS6
и VS10,
работающими в прямом и тиристорами VS1
и VS7,
работающими в обратном направлениях
(рисунок 1.1) или симисторами соответственно
ТСЗ и ТС5, ТС1 и ТС4 (рисунок 1.2). Управление
ТК статора осуществляется системой
фазового управления (СФУ), обеспечивающей
регулирование угла открытия тиристоров
(симисторов) а и
тем самым регулирование напряжения,
подводимого к двигателю, в функции
сигнала рассогласования
![]() заданной
и фактической скоростей. Угол,
заданной
и фактической скоростей. Угол,![]() определяется величиной напряжения
управления
определяется величиной напряжения
управления![]() ,
которое формируется регулятором скоростиPC.
Фактическая частота вращения измеряется
с помощью тахогенератора BR,
преобразующего скорость вращения
электродвигателя в напряжение постоянного
тока
,
которое формируется регулятором скоростиPC.
Фактическая частота вращения измеряется
с помощью тахогенератора BR,
преобразующего скорость вращения
электродвигателя в напряжение постоянного
тока
![]() .
Напряжение задания
.
Напряжение задания![]() ,
пропорциональное заданной скорости,
формируется задающим устройством
ЗУ в соответствии с проектной диаграммой
скорости ШПУ.
,
пропорциональное заданной скорости,
формируется задающим устройством
ЗУ в соответствии с проектной диаграммой
скорости ШПУ.
Выбор режима работы
электропривода подъемной машины ПМ
осуществляется блоком формирования
команд БФК путем переключений в СФУ
соответствующих каналов управления
тиристорами. Переход от двигательного
режима к тормозному и наоборот происходи
автоматически в зависимости от знака
сигнала
![]() ,
реверсирование и отключение двигателя
от сети производится по команде от
системы автоматизации ПМ.
,
реверсирование и отключение двигателя
от сети производится по команде от
системы автоматизации ПМ.
Для увеличения момента двигателя в области малых скоростей и получения желаемых пусковых и тормозных характеристик в цепь ротора включаются добавочные сопротивления, которые шунтируются трехфазным тиристорным короткозамыкателем, состоящим из тиристоров VS11, VS12, VS13, управляемых блоком шунтирования резисторов БШР.
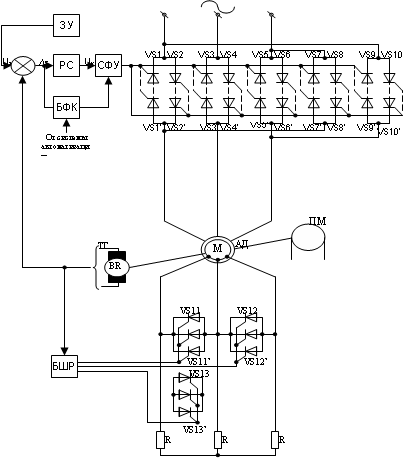
Рисунок 1.1 – Функциональная структура системы тиристорного параметрически регулируемого привода со смешанным управлением асинхронным двигателем.
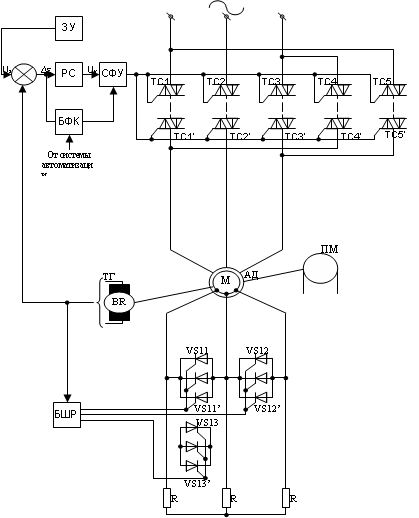
Рисунок 1.2 - Функциональная структура системы тиристорного параметрически регулируемого привода со смешанным управлением асинхронным двигателем (с симисторами в цепи статора).
2 Определение мощности и выбор электродвигателя
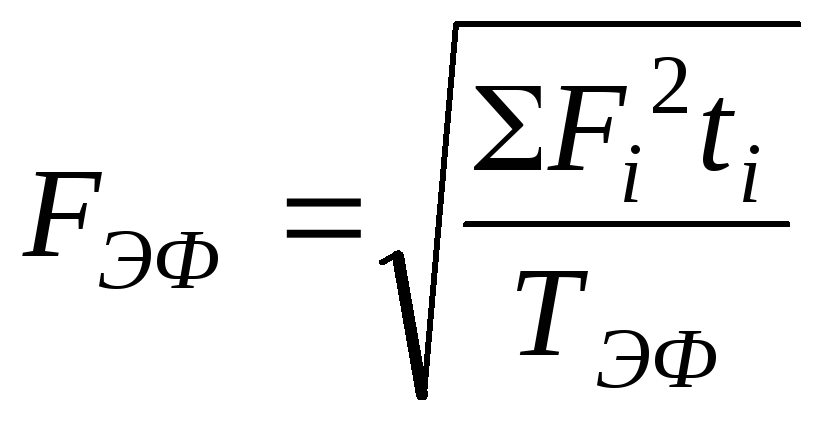
Эффективная мощность приводного двигателя определяется по эффективному усилию [2,3] исходя из соотношения
![]() ,
(2.1)
,
(2.1)
где
![]() -
эффективное движущее усилие по окружности
навивки, Н;
-
эффективное движущее усилие по окружности
навивки, Н;
![]() -
максимальная скорость движения скипов,
м/с;
-
максимальная скорость движения скипов,
м/с;
![]() - КПД редуктора, принимается равным для
одноступенчатого редуктора 0,97, для
двухступенчатого - 0,95.
- КПД редуктора, принимается равным для
одноступенчатого редуктора 0,97, для
двухступенчатого - 0,95.
Эффективное усилие определяется по формуле
 ,
(2.2)
,
(2.2)
где
![]() и
и![]() -
соответственно усилия наi-м
участке и время i-го
участка диаграммы
-
соответственно усилия наi-м
участке и время i-го
участка диаграммы
нагрузки;
![]() -
эффективное время,
работы двигателя.
-
эффективное время,
работы двигателя.
Если разница в значениях
![]() и
и![]() велика,
то соответствующие слагаемые в
формуле (2.2) определяются как
велика,
то соответствующие слагаемые в
формуле (2.2) определяются как
![]() ,
(2.3)
,
(2.3)
если же эта разница невелика, то слагаемое может быть определено по формуле
![]() .
(2.4)
.
(2.4)
Эффективное время определяется по выражению
![]() ,
(2.5)
,
(2.5)
где
![]() - общее время движения с максимальной
скоростью, с;
- общее время движения с максимальной
скоростью, с;
![]() - общее время движения
с ускорением изамедлением,
с;
- общее время движения
с ускорением изамедлением,
с;
![]() - время паузы, с.
- время паузы, с.
Установочная мощность и требуемая скорость вращения вала двигателя определяются по формулам:
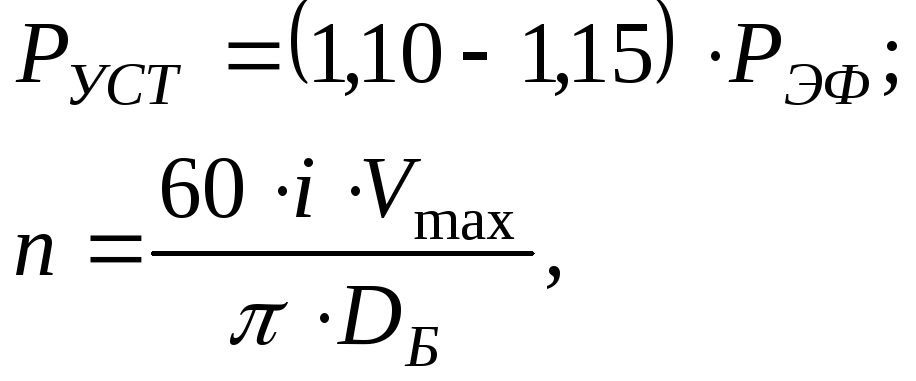 (2.6)
(2.6)
где
![]() ,
,![]() -
соответственно передаточное число
редуктора и максимальная скорость
движения сосуда (таблицы 4 и 2 приложения
2);
-
соответственно передаточное число
редуктора и максимальная скорость
движения сосуда (таблицы 4 и 2 приложения
2);
![]() -
диаметр навивки окружности
барабана, м.
-
диаметр навивки окружности
барабана, м.
По установочной мощности, требуемой скорости вращения вала двигателя и в соответствии с данными каталогов заводов изготовителей подъемных электродвигателей выбирается асинхронный двигатель с фазным ротором серии АКН [4].
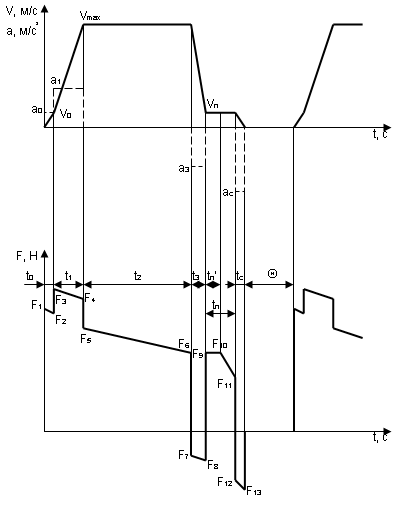
Рисунок 2.1 – Тахограмма (а) и диаграмма движущих усилий (б).
Выбранный двигатель проверяется на допустимую перегрузку по выражению
![]() ,
…… (2.7)
,
…… (2.7)
где
![]() - максимальное движущее
усилие, устанавливаемое подиаграмме,
Н;
- максимальное движущее
усилие, устанавливаемое подиаграмме,
Н;
![]() -
номинальное движущее усилие, развиваемое
двигателем, Н:
-
номинальное движущее усилие, развиваемое
двигателем, Н:
1,6 - коэффициент допустимой перегрузки асинхронных двигателей.
Номинальное движущее усилие определяется по формуле
![]() .
(2.8)
.
(2.8)