

i-808190579
.pdfПродолжение прил. 6
71
ЛАБОРАТОРНАЯ РАБОТА № 4
ИДЕНТИФИКАЦИЯ ПАРАМЕТРОВ ДИНАМИЧЕСКОЙ МОДЕЛИ
Цель работы – преобразование и исследование динамических моделей, обработка результатов эксперимента МНК и рекуррентным МНК, анализ полученных результатов.
КРАТКОЕ ТЕОРЕТИЧЕСКОЕ ОПИСАНИЕ
Динамика объекта определяется структурной схемой (рис. 4.1) и передаточными функциями ее элементов (звеньев)
W ( p) |
x( p) |
|
b pm ... b p b |
|
|||
|
m |
1 |
0 |
(4.1) |
|||
|
|
|
|
|
|||
i |
u( p) |
|
a |
|
pn ... a p 1 |
|
|
|
|
n |
|
||||
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V ( p) |
|||
|
|
|
|
|
|
|
|
|
|
|
||||
|
u( p) |
|
Динамика |
x( p) |
|
|
y( p) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
объекта |
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
T |
||
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
u kT0 |
|
|
|
|
|
|
y kT0 |
||||||
|
|
|
|
|
|
Рис. 4.1 Объект идентификации |
||||||||
Коэффициент усиления звена |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
K W (0) |
b0 |
. |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
Экспериментальное |
определение параметров |
динамической модели |
||||||||||||
предполагает измерение входных и выходных переменных объекта в дискретные моменты времени t kT (см. рис. 4.1). Перейдем от непрерывной
модели (4.1) к дискретной одним из методов, рассмотренных в разделе 3.4
[1].
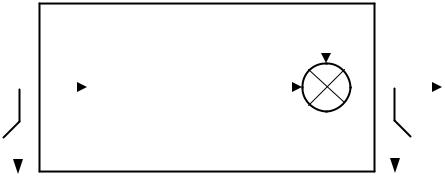
Процесс перехода к дискретной модели рассмотрим на примере объекта, представленного последовательным включением двух звеньев с параметрами (рис. 4.2)
W ( p) |
x1 ( p) |
|
K1 |
|
; W ( p) |
x ( p) |
|
K |
|
|
. (4.2) |
|
|
|
|
|
|
|
|
||||||
1 |
u( p) |
|
T p 1 |
|
|
x ( p) |
|
T p T p |
|
|||
|
|
|
|
|
|
|||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
72 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V t |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
u t |
|
|
|
|
x |
(t ) |
|
|
|
|
|
|
|
|
y t |
|||||||
|
|
|
|
|
|
x (t) |
|||||||||||||||||
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
. p |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T |
|
|
|
|
|
T |
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
u(kT0 ) |
|
|
|
y (kT ) |
|
|
|
|
|
|
|
|
y (kT ) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
Рис. 4.2. Модель объекта |
|
|
|
|
|
|
|
|
||||||||
Листинг программы перехода представлен на рис. 4.3. |
|
|
|
||||||||||||||||||||
%Преобразование непрерывной модели |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
clc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
clear |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
W1=tf(2,[3 1]); |
|
%W1(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
W2=tf(3,[4 1.6 1]); |
%W2(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
W=W1*W2; %ПФ разомкнутой системы |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
step(W) %оценка времени п.п и выбор Т0 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
T0=1; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
W1z=c2d(W1,T0) |
%переход к дискретной ПФ |
|
|
|
|
|
|
|
|
||||||||||||||
W2z=c2d(W2,T0) % переход к дискретной ПФ |
|
|
|
|
|
|
|
|
|||||||||||||||
%Переход к непрерывной модели по результатам идентификации |
|
|
|
||||||||||||||||||||
% W1Z=tf(0.567,[1 -0.716],1); |
%ввод оценок параметров дискретной W1 |
||||||||||||||||||||||
% W2Z=tf([0.364 0.288],[1 -1.408 0.619],1); %ввод оценок |
дискретной W2 |
||||||||||||||||||||||
%W1p=d2c(W1Z);%переход к непрерывной W1
%W2p=d2c(W2Z); %переход к непрерывной W2
% Wp=W1p*W2p; % оценка ПФ системы
% step(W,'-',Wp,'--') %сравнение п.п исходной и оценки модели
Transfer function: 0.5669
----------
z - 0.7165
Sampling time (seconds): 1 Transfer function:
0.323 z + 0.2824
----------------------
z^2 - 1.469 z + 0.6703 Sampling time (seconds): 1
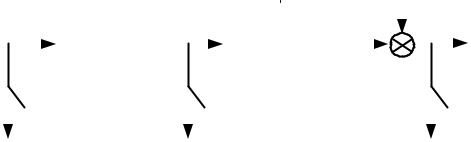
Рис. 4.3. Листинг программы и результаты расчета, лист 1
73
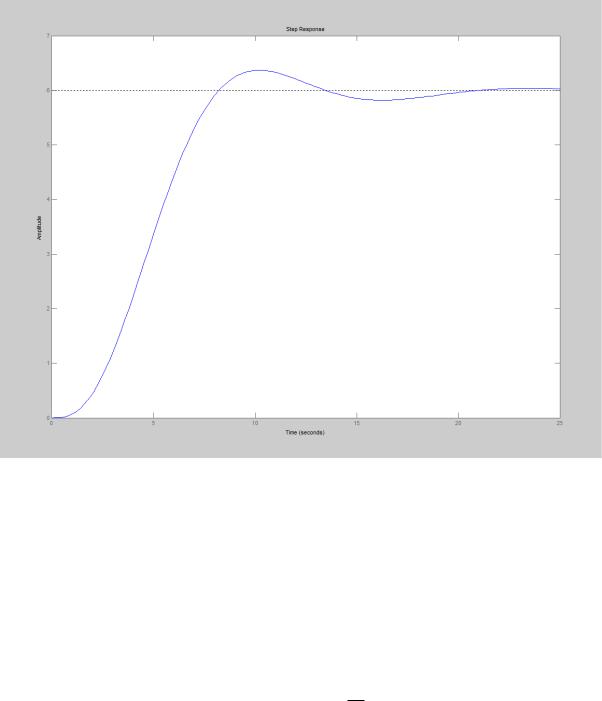
Рис. 4.3. Продолжение. Переходной процесс, лист 2
Измерению доступны u(t) , выход y (t) и выход второго звена y (t) . Съем данных осуществляется синхронно с интервалом T , выбираемого из
соотношения
T / / tnn ,
где tnn – время переходного процесса.
Для нашего примера tnn определено из графика переходного процесса
(см. рис. 4.3), tnn с, соответственно T сек.
По результатам работы программы (см. рис. 4.3) дискретная передаточная функция для первого звена
W (z) |
y (z) |
|
b |
|
|
|
. |
|
. |
|
U (z) |
z а |
|
z . |
|||||||
|
|
|
|
|
||||||
Поделим ее числитель и знаменатель на z и получим |
|
|||||||||
W (z ) |
|
. z |
. |
|
(4.3) |
|||||
|
|
|
|
|
|
|
||||
|
|
. z |
|
|
|
|
||||
|
|
|
|
|
||||||
Соответственно для второго звена
74
W2 |
(z) |
y2 |
(z) |
|
|
b21 z b22 |
|
|
|
0.323z 0.2824 |
, |
|||||
y (z) |
z 2 |
a2 |
z a2 |
2 |
z 2 |
1.469z |
0.6703 |
|||||||||
|
|
|
|
|
||||||||||||
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
||
поделим на z и получим |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
W (z ) |
|
. z . z |
. |
|
(4.4) |
||||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
. z . z |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||||||
Вычислим коэффициент усиления второго звена
K |
. . |
. . |
||
|
|
|||
. . |
||||
|
|
|||
Как видно, сказываются ошибки округления при выводе на печать параметров дискретной передаточной функции.
Переход к разностным уравнениям. Для передаточной функции (4.3),
согласно уравнений (3.16) и (3.18) [1], имеем
y1 |
(k) 0.7165y1 |
(k 1) 0.5669u(k 1) или |
(4.5) |
|
y1 |
(k) 0.5669u(k 1) 0.7165y1 (k 1). |
|||
|
||||
В общем виде разностное уравнение (4.5) имеет вид
y(k) a1 y(k 1) ... anay (k na) b1u(k nk) b2u(k nk 1) ...
... bnbu(k nk nb 1),
(4.6)
где nа=n – порядок знаменателя (4.1), nb=m – порядок числителя (4.1), nk=d+1 – транспортное запаздывание. Это линейная параметрическая модель вход-выход типа ARX (na,nb,nk) в приложении System Identification Toolbox.
Уравнение (4.5) представим в виде
|
|
|
|
y (k) T (k) , |
||
где T (k) u(k 1) |
y (k 1) |
|
|
|
||
– это правая часть уравнения (4.5) вектор- |
||||||
1 |
|
|
1 |
|
|
|
строка и |
|
. |
|
|
|
|
|
|
– это коэффициенты уравнения (4.5). |
||||
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
Для второго звена согласно (4.4) имеем
y (k) . y (k ) . y (k ) . y (k ) . y (k ) или
y2 (k) . y (k ) . y (k ) . y (k ) . y (k ) V (k).
(4.7)
В уравнении (4.7) учтено то, что входом звена 2 является y (k) и что y (k) измеряется помехой V (k) (см. рис. 4.2).
Уравнение (4.7) запишем в векторном виде
|
|
|
|
|
|
y |
|
(k) T |
(k) |
|
V (k) , |
(4.8) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где |
T |
(k) y (k ) |
y (k ) |
y |
|
(k ) |
y |
|
(k ) |
– вектор-строка, |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
T |
. |
. |
. |
. . |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
75 |
|
|
|
|
|
|
Проведение эксперимента и идентификация (оценивание) параметров динамической модели. Расчет по уравнению (4.5) возможен с момента k при определении начальных условий правой части уравнения y ( ) .
Для уравнения (4.7) расчет возможен с k и определении начальных условий y ( ) , y ( ) . Значения входных воздействий y ( ) и y ( ) для
k определены уравнением (7.5) и его начальными условиями.
Результаты эксперимента k ...N представим в векторно-матричной форме (с учетом (4.6) и (4.8)).
|
y ( ) |
|
T ( ) |
|
||||
|
|
|
|
|
|
|
|
|
|
y ( ) |
|
T |
( ) |
|
|||
|
|
|
|
|
|
|
||
Y |
|
; |
|
; |
||||
|
|
|
||||||
|
y (k) |
|
T (k ) |
|
||||
|
|
|
|
|
|
|
||
|
|
|
|
|
||||
|
|
|
|
T |
|
|
|
|
y (N ) N |
|
|
(N ) N |
|
||||
|
y ( ) |
|
T ( ) |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
y (k) |
; |
T |
(k) |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y (N ) ( N ) |
|
T (N ) ( N ) |
|
||||
(4.9)
(4.10)
Размерности этих матриц справедливы для системы Mathcad, где возможен индекс k . В системе Matlab, где минимальный индекс массива k все индексы указанных массивов увеличиваются на единицу.
Результаты эксперимента представим в виде
|
|
|
Y θ ; |
|
|
|
|
Y θ |
2 |
, |
||||
|
|
|
|
|
1 |
|
|
|
|
|
|
|
||
а неизвестные оценки параметров модели рассчитаем МНК |
|
|
||||||||||||
θ |
|
|
T |
Y ; |
|
θ |
T |
|
|
|
|
Y . |
|
(4.11) |
T |
|
|
T |
|
||||||||||
1 |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
Рекуррентный МНК (РМНК). Представим модели (4.6) и (4.8) соответ- |
||||||||||||||
ственно в виде |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(k) T (k) θ |
(k ) , |
|
(k) T |
(k) θ |
2 |
(k ) , |
|
(4.12) |
|||||
1 |
|
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
где θ1 (k ) , θ2 (k ) |
– оценки, полученные |
на предыдущем шаге; 1 (k) , |
||||||||||||
2 (k) – прогноз (оценка) выходных переменных звеньев на k-ом шаге поиска по результатам наблюдения T (k) и T (k) .
Тогда процедура МНК будет иметь вид [2]
θ(k) θ(k ) (k) y(k) T (k) θ(k ) ,k n,n ,...,N , (4.13)
где вектор коррекции
76
(k) |
C(k ) (k) |
, |
(4.14) |
|
|||
T (k)C(k ) (k) |
|||
а ковариационная матрица оценок параметров |
|
|
|
C(k) C(k ) (k) T (k)C(k ) . |
(4.15) |
||
В уравнении (4.13) выражение в квадратной скобке равно невязке между измеренным на объекте значением выходной переменной y(k) и предска-
занной по модели (4.12) с оценками, полученными на предыдущем такте вы-
числений. |
|
Исходными данными для алгоритма служат |
|
θ( ) ; C( ) I(n m) (n m) , |
(4.16) |
где число должно быть достаточно велико . |
|
Сходимость оценок зависит от выбора исходных значений C( ) и θ( ) .
Программа исследований в системе Mathcad приведена в Приложении
4.1.
Размерность матрицы I и векторов ψ, θ – определяются из уравнений
(4.6) и (4.8).
Обратный переход к непрерывной модели. Полученные МНК оценки дискретной модели θ1 и θ2 используем для перехода к непрерывной модели. Запишем в соответствие с (4.6) и (4.8) разностные уравнения
|
(k) u(k 1) |
|
|
y (k 1) |
|
θ10 , |
|
(4.17) |
|||||
|
1 |
|
|
|
|
|
1 |
|
|
θ11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
θ20 |
|
|
(k) y (k ) |
y (k ) |
y |
|
(k ) |
y |
|
(k ) |
θ21 |
, (4.18) |
|||
2 |
|
|
|
|
|
|
|
|
|
θ22 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
θ23 |
|
и соответствующие им оценки дискретных передаточных функций (см. |
|||||||||||||
уравнения (4.3) и (4.4)) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 (z) |
θ10 |
|
; |
|
|
|
|
|
|
(4.19) |
||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
− θ11 |
|
|
|
|
|
|
|
|
||
|
2 (z) |
θ20 + θ21 |
. |
|
|
|
|
(4.20) |
|||||
|
|
|
|
|
|
||||||||
|
|
2 − θ22 + θ23 |
|
|
|
|
|
||||||
Обратный переход осуществляем в системе Matlab (см. рис. 4.3, часть 2 закомментированный блок). Сравнение графиков переходных процессов исходной и полученной по результатам эксперимента модели для уровня помехv . , представлен на рис. 4.5.
77
|
Рис. 4.5. Переходной процесс исходной модели и ее оценки для σv=0.1 |
|||||
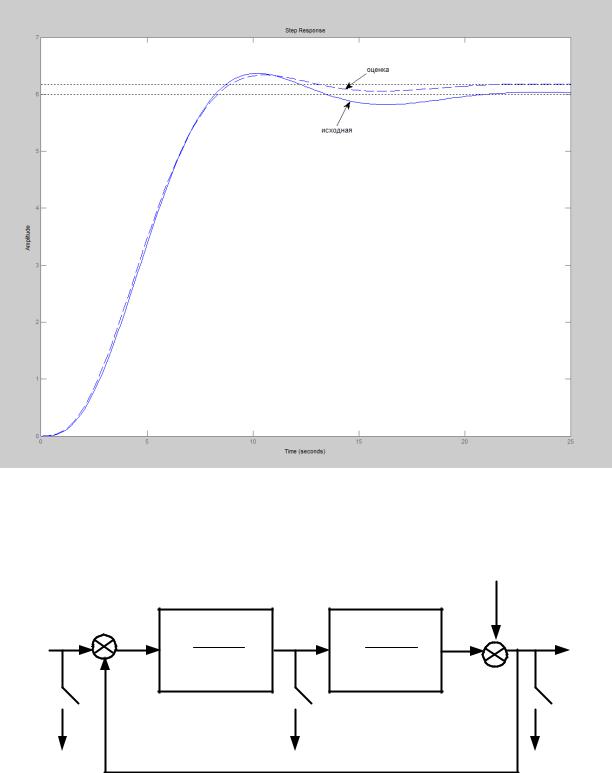
Идентификация параметров ss-моделей. Рассмотрим замкнутую сис- |
||||||
тему примера 3.2 [1], представленную на рис. 4.6. |
|
|
||||
|
|
|
|
|
|
V |
u |
e |
K |
x |
K |
x |
y |
|
||||||
|
- |
T p |
|
T p |
|
|
|
|
|
|
|
|
|
|
T |
|
|
T |
|
T |
|
|
|
|
|
|
|
u(kT0 ) |
|
|
|
y (kT ) |
|
y (kT ) |
Рис. 4.6. Модель объекта
Переход к моделям пространства состояний непосредственно по структурной схеме дает следующую ss-модель
78
|
|
|
|
|
|
|
||
|
|
|
|
|||||
|
|
|
||||||
x |
|
|
|
|
T |
|||
|
|
|
|
|
||||
|
|
|
K |
|||||
|
|
|||||||
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
||
|
|
T |
||||||
|
|
|
|
|
|
|||
|
K |
|
|
|
K |
||||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
||||
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
T |
|
|
|
|
T |
||
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
||
|
|
|
|
x |
|
|
|
||
|
|
|
|
|
|
|
|
||
|
T |
|
|
|
|
|
|||
|
|
|
r(t); |
|
|
|
(4.21) |
|
y |
x |
|
|
|
|
|
|
||
|
. |
|
|
|
|
|
|
|
|
|
x |
|
|
|
Задавая параметры модели T с, |
K , T с, |
K , T , пе- |
||
рейдем к дискретной ss-модели, используя процедуру с2d Matlab (рис. 4.7).
%ss-модель clc
clear
N=100; mu=0; su=1; sv=0.1; U=mu+su*randn(N,1);
%V=sv*randn(N,1); %нормально распределенная помеха с mv=0 и СКО-sv V(1:N)=0;
%U(1:N)=1; %ступенчатое воздействие для оценки tnn
T1=10; T2=5;K1=1; K2=1; T0=1; %параметры непрерывной модели A=[-1/T1 -K1/T1;K2/T2 -1/T2];
b=[K1/T1;0];
c=[1 0;0 1]; d=[0;1];
ssm=ss(A,b,c,d); %непрерывная ss-модель ssd=c2d(ssm,T0)%дискретная ss-модель
A1=[0.8961 -0.08582;0.1716 0.8103];%параметры дискретной ss-модели b1=[0.09486;0.009041];
x=zeros(2,N); %обнуление массивов y=zeros(2,N);
for k=1:N
x(:,k+1)=A1*x(:,k)+b1*U(k); %эксперимент на объекте y(:,k)=c*x(:,k)+d*V(k);
end
% plot(y(2,:)) %для оценки tnn при U(k)=1
D1=zeros(3,N); %обнуление матрицы текущих оценок параметров звена 1 (для %графика)
D2=zeros(3,N); %тоже для звена 2 alp=10^15;
C1=alp*eye(3); %ковариационная матрица оценок параметров (исходная)
C2=alp*eye(3);
Q1=zeros(3,1);%начальные оценки параметров звена 1
Q2=zeros(3,1);%тоже для звена 2
%Идентификация параметров РМНК
for k=2:N
%звено 1 ksi1=[y(1,k-1);y(2,k-1);U(k-1)];
Gk1=(C1*ksi1)/(1+(ksi1'*C1*ksi1));
C1=C1-((C1*ksi1*ksi1'*C1)/(1+(ksi1'*C1*ksi1)));
Рис. 4.7. Программа перехода к дискретной ss-модели, лист 1
79
e1(k)=y(1,k)-ksi1'*Q1;%невязка Q1=Q1+Gk1*e1(k);
D1(:,k)=Q1;% массив оценок для графика звено 2 ksi2=[y(1,k-1);y(2,k-1);U(k-1)];
Gk2=(C2*ksi2)/(1+(ksi2'*C2*ksi2)); C2=C2-((C2*ksi2*ksi2'*C2)/(1+(ksi2'*C2*ksi2))); e2(k)=y(2,k)-ksi2'*Q2;
Q2=Q2+Gk2*e2(k);
D2(:,k)=Q2;
end
disp(Q1')%печать оценок звена 1 на N-ом шаге disp(Q2')%печать оценок звена 2 на N-ом шаге subplot(211);plot(D1(1,:),'k');
grid on
title('Оценки звена 1') hold on plot(D1(2,:),'k--') hold on plot(D1(3,:),'m')
subplot(212);plot(D2(1,:),'r'); grid on
title('Оценки звена 2') hold on plot(D2(2,:),'r--') hold on plot(D2(3,:),'m')
a = |
|
|
|
x1 |
x2 |
x1 |
0.8961 |
-0.08582 |
x2 |
0.1716 |
0.8103 |
b = |
|
|
|
u1 |
|
x1 |
0.09486 |
|
x2 |
0.009041 |
|
c = |
|
|
x1 x2
y1 1 0
y2 0 1 d =
u1
y1 0
y2 1
Sampling time (seconds): 1 Discrete-time state-space model.
0.8961 -0.0858 0.0949
0.1716 0.8103 0.0090
Рис. 4.7. Продолжение. Программа перехода к дискретной ss-модели, лист 2
80