

i-808190579
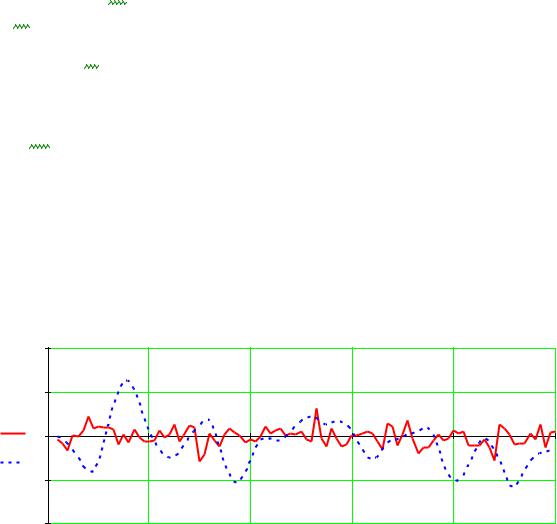
.pdfРис. 4.7. Продолжение. Графики изменения оценок параметров при идентификации РМНК, лист 3
Уравнения состояния дискретной модели по результатам расчета в Matlab в общем виде
.
где A
.
х(k 1) A1 х(k) b1 u(k) |
, |
(4.22) |
||
у(k) Cх(k) d V (k) |
|
|
||
. |
|
. |
|
|
, b |
. |
|
|
|
|
|
|
|
|
. |
|
. |
|
|
Подставляя в уравнения наблюдения уравнения состояния (4.22) и за-
меняя переменные x (k ) |
на наблюдаемую y (k ) , x (k ) на |
y (k ) |
|||
получим |
|
|
|
|
|
y (k) a y (k ) a y (k ) b u(k ), |
|
(4.23) |
|||
y (k) a y (k ) a y (k ) b u(k ) V (k). |
|||||
|
|||||
Соответственно по аналогии с уравнением (4.6) запишем |
|
|
|||
y (k) T (k) , |
|
(4.24) |
|||
|
|
|
|
|
|
81
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
где T (k) y (k ) |
y |
|
(k ) |
u(k ) , |
|
|
|
a . |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
По аналогии с уравнением (4.8) запишем |
|
|
|
|
|||||||||
|
|
|
|
y |
|
(k) T (k) |
|
V (k) , |
|
|
(4.25) |
||
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
где T (k) y (k ) |
y (k ) |
u(k ) , |
|
|
|
|
|
||||||
|
a . |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
Для расчета неизвестных оценок θ1 и θ2 |
используем РМНК (см. рис. |
||||||||||||
4.7), причем |
идентификация |
ведется последовательно |
для каждого звена |
||||||||||
(уравнения), а не матрицы А1 в целом. Результаты показывают хорошую сходимость оценок.
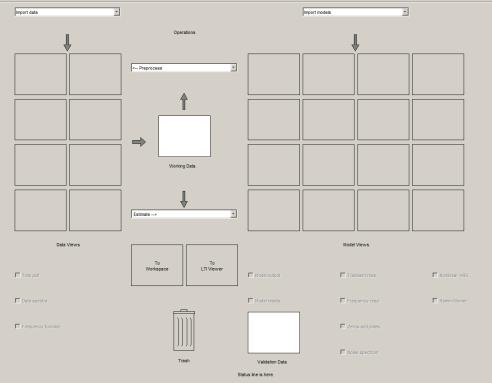
Последовательность работы в графическом интерфейсе Sistem Identification Toolbox.
Для вызова графического приложения в командном окне или m-файле набираем команду
ident.
Появляется окно System Identification Tool-United, которое условно можно разделить на 3 зоны (рис. 4.8).
Рис. 4.8.
82
В первой зоне осуществляется импорт данных (результатов наблюдений или моделирования), представленных временными данными u(k) , y(k) –
Time domain data, либо в виде подготовленного модуля (файла) функцией data1=idata(u,y,Ts)
объекта (Data object), либо типового – Example.
Входные данные можно просмотреть на графике – Time plot, рассчитать периодограмму – Data spectra, амплитудно-частотную и фазочастотную ха-
рактеристику – Frequency function.
По итогам визуального анализа можно провести предварительную обработку исходных данных – Preprocess (удаление тренда, центрирование, фильтрацию, реконструкцию пропущенных данных, дискретизацию и т.п.)
После активизации Time domain data, всплывает окно Import Data в поле Work space variable, в котором вписываем входные u и выходные переменные у разностного уравнения (звена или системы).
Можно заменить имя данных, например, W1 (первое звено) и активизировать клавишу Import. Данные введены.
В основном окне высветится окно с данными W1.
Повторяя данную последовательность для остальных звеньев, введем всю систему. При этом следует помнить, что входы второго звена – это выход первого звена.
Далее переносим мышкой окно W1→Working Data→Estimate→Linear parametric models→ открывается окно Linear parametric models→ корректи-
руем Order 1 1 1, что соответствует порядку разностного уравнения na nb nk→ARX→Estimate в левом нижнем углу.
Процедуру повторяем для второго звена для na=2, nb=2, nk=1. Устанавливая птички в поле Model Views, получим графический анализ
свойств обеих моделей arx 111 и arx 221.
Для вывода на печать результатов идентификации необходимо мышью из окна Import Models перенести имя модели в окно To Workspace и набрать это имя в командной строке, например, >>ARX 1 1 1, либо двойным кликом в окне с этим именем в поле Import Models.
ИСХОДНЫЕ ДАННЫЕ ДЛЯ РАБОТЫ
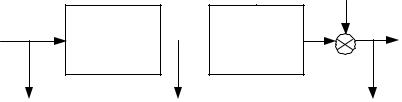
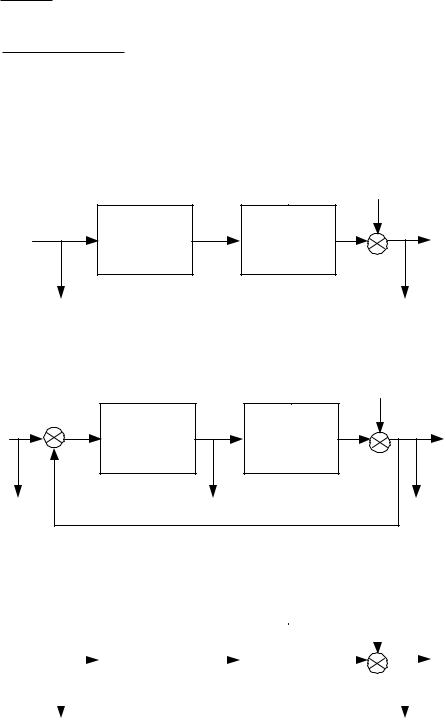
Вариант 1. Структурная схема и измеряемые переменные
V
u
W  W
W
u(kT0 ) |
y (kT ) |
y (kT ) |
83
W |
K |
|
, K |
, T с. |
|
|
|
T p |
|
|
|
|
|
||
W |
|
|
K |
|
, K , T с, . . |
|
|
p |
T |
|
|||||
T |
|
|
|
||||
|
|
|
|
|
|
|
|
U – нормальный белый шум с параметрами mU , U . |
|||||||
V (t) – нормальный белый шум с параметрами mv , v |
. . |
||||||
Вариант 2. Структурная схема и измеряемые переменные. Параметры |
|||||||
и воздействия варианта 1. |
|
|
|
||||
|
|
|
|
|
|
V |
|
|
|
|
u |
|
|
Y |
|
|
|
|
|
|
W |
W |
|
|
|
|
|
|
|
|
|
|
|
|
u(kT0 ) |
|
|
y(kT ) |
|
Вариант 3. Структурная схема и измеряемые переменные. Параметры |
|||||||
и воздействия варианта 1. |
|
|
|
||||
u |
|
|
|
|
|
V |
|
|
|
e |
|
|
W |
Y |
|
|
|
|
|
W |
|||
|
|
|
|
|
|
||
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
u(kT0 ) |
|
|
y (kT ) |
y (kT ) |
|||
|
|
|
|
|
|
|
|
Вариант 4. Структурная схема и измеряемые переменные. Воздействия |
|||||||
варианта 1 |
|
|
|
|
|
|
|
|
|
|
|
u |
|
|
|
|
|
|
|
|
|
|
V |
|||
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
W |
|
|
W |
|
|
|
|
Y |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
u(kT0 ) |
|
|
|
|
|
|
|
y(kT ) |
||||||
W |
K |
|
, |
|
K |
, T с. |
|
|
|
|
|
|
|
|
|
|||
T p |
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
W e p , с.
Вариант 5. Структурная схема и измеряемые переменные. Воздействия варианта 1.
84
|
|
|
|
u(t) |
|
|
|
|
|
|
|
|
|
|
|
V |
||||
|
|
|
|
|
W |
|
|
|
|
W |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
u(kT0 ) |
|
|
y (kT ) |
|
|
|
|
y (kT ) |
||||||||
W |
K |
|
, K |
. , T . с, W |
|
. |
|
|
|
|
|
|
||||||||
T p |
p |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Вариант 6. Структурная схема и измеряемые переменные. Воздействия варианта 1.
|
|
u(t) |
|
|
|
|
|
|
|
|
|
|
|
|
V |
||||||
|
|
|
|
|
W |
|
|
|
W |
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
u(kT0 ) |
|
y (kT ) |
|
|
|
y (kT ) |
|||||||||||||
W |
T p |
, T |
с, T с, |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||
T p |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
W |
|
|
|
K |
|
|
|
, K , T с, T |
с. |
||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||
T p T p |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Вариант 7. Структурная схема и измеряемые переменные. Воздействия варианта 1.
|
|
|
|
|
u(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
||||
|
|
|
|
|
|
|
|
|
W |
|
|
|
|
W |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
u(kT0 ) |
|
|
|
|
y (kT ) |
|
|
|
y (kT ) |
|||||||||
W |
|
T p |
|
, T |
с, |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
T p |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
W |
|
K |
|
|
, K |
, |
T |
с. |
|
|
|
|
|
|
|
||||||||
T p |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Вариант 8. Исходные данные варианта 1. Далее осуществить переход к модели пространства состояний по структурной схеме. Сформировать ssмодель
85
x Ax bu
ycx V ,
иперейти к разностным уравнениям, используя процедуру с2d.
x(k 1) Ax(k) bu(k), y(k) cx(k) V (k).
Вариант 9. Исходные данные варианта 3. Далее осуществить переход к модели пространства состояний по структурной схеме. Сформировать ssмодель
x Ax bu
ycx V ,
иперейти к разностным уравнениям, используя процедуру с2d.
x(k 1) Ax(k) bu(k), y(k) cx(k) V (k).
Вариант 10. Исходные данные варианта 5. Далее осуществить переход к модели пространства состояний по структурной схеме. Сформировать ssмодель
x Ax bu
ycx V ,
иперейти к разностным уравнениям, используя процедуру с2d
x(k 1) Ax(k) bu(k), y(k) cx(k) V (k).
Вариант 11. Исходные данные варианта 6. Далее осуществить переход к модели пространства состояний по структурной схеме. Сформировать ssмодель
x Ax bu
ycx V ,
иперейти к разностным уравнениям, используя процедуру с2d
x(k 1) Ax(k) bu(k), y(k) cx(k) V (k).
Вариант 12. Исходные данные варианта 7. Далее осуществить переход к модели пространства состояний по структурной схеме. Сформировать ssмодель
x Ax bU
ycx V ,
иперейти к разностным уравнениям, используя процедуру с2d
x(k 1) Ax(k) bu(k), y(k) cx(k) V (k).
86
ЗАДАНИЕ И ПОРЯДОК ВЫПОЛНЕНИЯ РАБОТЫ:
Согласовать с преподавателем среду моделирования Mathcad или Mat-
lab.
Идентификация параметров модели без помех Vk .
1) в соответствие с вариантом выбрать и нарисовать структурную схему, записать передаточную функцию Wi ( p) и ее параметры. От передаточ-
ные функции Wi ( p) перейти к дискретным передаточным функциям Wi (z)
(7.3), (7.4) с использованием z -преобразования в среде Matlab;
2) построить график переходного процесса и оценить время переходного процесса tnn объекта.
Значение интервала квантования T выбрать в интервале T ( / / ) tnn так, чтобы величина запаздывания d (если имеется звено запаздывания) была равна целому числу тактов квантования.
3) на основании дискретных передаточных функций Wi (z) записать разностные уравнения звеньев и уравнения наблюдения;
4)на основе разностных уравнений вида (7.5) (7.7) проведите испытания объекта исследования в объеме N для начальных условий y( ) ;
5)представьте реализации входной U (k) и выходной y(k) переменной на графике;
6)реализуйте процедуру МНК для получения оценок θ, сравните полученные оценки с реальными коэффициентами ;
7)реализуйте процедуру РМНК и сравните полученные оценки с МНК-оценками. Изменение РМНК-оценок в функции k представьте на графиках;
8)для полученных МНК-оценок осуществить переход к непрерывной модели и сравните графики переходного процесса исходной и полученной модели;
9)повторите расчеты для заданного уровня помех v . Оцените их
влияние.
10) повторите расчеты для уровня входного воздействия mu и Vk и оцените влияние уровня mu на процесс идентификации.
Выводы по работе должны включать:
1)процесс перехода от передаточной функции W ( p) к дискретной передаточной функции W (z) ;
2)объяснение процедуры обычного МНК (согласно листинга программы);
87
3)объяснение процедуры рекуррентного МНК (согласно листинга программы);
4)сравнительный анализ полученных оценок параметров модели с заданными (истинными);
5)объяснение результатов проведенного анализа;
6)достоинства и недостатки использованных методов;
КОНТРОЛЬНЫЕ ВОПРОСЫ
1.В чем отличие матриц наблюдения входов и выхода для статических
идинамических объектов?
2.Матричная форма записи результатов эксперимента.
3.В чем разница между обычным МНК и рекуррентным МНК?
4.Влияют ли параметры входного mu v и сигнала на точность полу-
ченных оценок модели?
ЛИТЕРАТУРА
1. Масальский, Г.Б. Математические основы кибернетики: учебное пособие / Г.Б. Масальский. – Красноярск: Сиб. федер. ун-т, 2014. – 215 с. (электронная версия).
2. Изерман Р. Цифровые системы управления. – М.: Мир, 1984 – 541 с.
88
|
|
|
Тестовый пример в системе Mathcad для T |
|
||||||||||||||||||||
1. Проведение эксперимента на объекте |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
Вариант |
|
W 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
N 100 |
u 1 |
mu 0 |
U rnorm(N 1 mu u ) |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
v 0.1 |
СК О |
|
|
|
|
|
|
|
|
|
|
||||
Помеха |
V rnorm(N 1 0 v ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
a1 0.7165 |
|
b1 0.5669 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
a2 |
1 |
1.469 |
|
a2 |
2 |
0.6703 |
b2 |
0.323 |
b2 |
0.2824 |
|
|
|
b1 |
|
|||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
1T |
|
|||||
Y10 0 |
Y20 0 |
|
|
Y21 0 |
-начальные ус ловия; |
|
|
|
|
a1 |
|
|||||||||||||
|
|
|
b2 |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
k 1 N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b2 |
|
|
|
|
Y1 b1 U |
a1 Y1 |
|
|
|
|
|
|
|
|
|
|
2T |
2 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
k |
|
k 1 |
|
|
|
k 1 |
|
|
|
|
|
|
|
|
|
|
a21 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
k 2 N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Y2 b2 |
Y1 |
|
|
b2 |
Y1 |
a2 |
1 |
Y2 |
|
a2 |
2 |
Y2 |
|
a22 |
|
|
|
||||||
|
|
k |
1 |
k 1 |
|
|
2 |
k 2 |
|
k 1 |
|
|
|
k 2 |
|
|
|
|
|
|
||||
|
|
Y2k Y2k |
|
|
|
|
|
|
|
(с помехой + Vk) |
|
|
|
|
|
|
||||||||
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uk |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y2k |
|
0 |
|
|
20 |
|
40 |
|
|
|
|
|
|
60 |
|
|
|
80 |
100 |
|||||
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис . П. 4.1. Изменение входной и выходной переменной |
|
|||||||||||||||||||
2. Процедура вычисления коэффициентов МНК (пакетный режим)
|
|
|
|
|
|
|
|
Звено 1 |
|
|
|
|
|
|
|
1 |
|
for i 1 N |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
qi 0 |
Ui 1 |
|
|
|
|
1 |
|
|
|
1.102 |
3 |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
T |
|
|
|
0.01 |
10 |
|
|||
|
|
|
|
|
|
|
|
||||||||
|
|
|
q |
Y1 |
P1 |
|
1 |
1 |
|
P1 |
|
|
|
|
|
|
|
|
i 1 |
i 1 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
1.102 10 3 |
0.013 |
|
||||
|
|
|
|
|
|
|
|
|
|||||||
|
|
1 q |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
89
1 P1 1T Y1 |
|
|
|
|
|
|
|
|
|||
|
|
|
1 |
0.567 |
1T |
0.567 |
|||||
|
|
|
0.717 |
0.717 |
|||||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
Звено 2 |
|
|
|
2 |
|
for i 2 N |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
qi 0 Y1i 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
qi 1 Y1i 2 |
|
|
|
|
|
|
|
|
|
|
|
qi 2 Y2i 1 |
|
|
|
|
|
|
|
|
|
|
|
qi 3 Y2i 2 |
|
|
|
|
|
|
|
|
|
|
2 q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
P2 |
|
T |
1 |
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|
2 P2 2T Y2 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
0.361 |
|
|
|
|
0.323 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
0.398 |
|
|
2T |
|
0.282 |
|
|
|
|
|
1.279 |
|
|
|
1.469 |
||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.506 |
|
|
|
|
0.67 |
|
90