

1. Уравнения динамики и статики объектов управления.
Различные по физической природе объекты управления могут описываться однотипными математическими зависимостями. Построение любой системы управления начинается с изучения объекта управления и составления его математического описания, которое может быть получено экспериментальным, аналитическим или комбинированным путем.
{В первом случае уравнения объекта получают путем постановки специальных экспериментов на объекте (метод активного эксперимента) либо статистической обработкой результатов длительной регистрации координат объекта в условиях его нормальной эксплуатации (метод пассивного эксперимента).
При аналитическом описании уравнения объекта получают на основании физико-химических закономерностей протекающих в нем процессов.
Комбинированный путь получения математического описания объектов подразумевает обычно составление уравнений аналитическим путем с последующим уточнением коэффициентов этих уравнений экспериментальным методом.} Уравнения объектов автоматического регулирования в зависимости от описываемого ими
режима работы подразделяются на уравнения статики и динамики.
Уравнения динамики описывают неустановившийся или переходный режим в объекте. Выходная координата объекта при этом является функцией времени и в общем виде уравнение динамики будет дифференциальным уравнением, содержащим производные по времени.
Объекты управления называются линейными, если они подчиняются принципу суперпозиции, который заключается в том, что реакция объекта на сумму входных сигналов равна сумме реакций на каждый из сигналов в отдельности. Линейные объекты описываются линейными дифференциальными уравнениями, то есть уравнениями, в которых искомая функция и ее производные содержатся в первой степени.
Уравнение динамики (представляет из себя ОДУ): an*(dnx(t)/dtn)+…+ a1*(dx(t)/dt)+ a0*x(t)= b0*g(t)+…+ bm*(dmg(t)/dtm).
Начальные условия: x(0),…, x(n-1)(0).
 – условие физической реализуемости.
– условие физической реализуемости.
Уравнения статики описывают установившийся режим, при котором все координаты объекта остаются неизменными во времени, то есть объект находится в состоянии равновесия. Они представляют собой алгебраические или дифференциальные уравнения, содержащие производные по какому-либо параметру, кроме времени. Существенной особенностью уравнений статики является неизменность координат объекта во времени. g(t)=const=g0, x(t)=const=x0.
Если g(t)=const=g0, то x(t)=const=x0. Тогда уравнение динамики преобразуется в уравнение статики:
a0* x0= b0* g0.
1
2. |
Передаточные функции объектов и устройств управления. |
||
g(t) |
|
|
x(t) |
ЛДС (W(S)) |
|
||
|
|
|
|
G(S) |
|
|
X(S) |
|
|
||
Классический подход предполагает переход от временной области в область изображений. Преобразование Лапласа.
L[x(t)]=X(S) – линейный оператор. t – время, S – переменная Лапласа S=σ+jω. X(S)= ∫x(t)e-stdt (интеграл берётся от 0 до ∞).
x(t)=L-1[X(S)]=1/2πj*
Задача Коши.
Линеаризация возможна при малых возмущениях.
L[x1(t)]=S*X(S)-X(0+)
…
L[xn(t)]=Sn*X(S)-Sn-1*X(0+)- …-Xn-1(0+)
Теорема свертки: 
Применим преобразование Лапласа к ОДУ, описывающее ЛДС: anSnX(S)+an-1Sn-1X(S)+…+a1SX(S)+a0X(S)–Mн.у.(S)= =bmSmG(S)+bm-1Sm-1G(S)+…+ b1SG(S)+ b0G(S)
Начальные условия (n штук): x(0+),.., x(n-1)(0+) Положим начальные условия нулевыми. X(S)[anSn +…+ a0]= G(S)[bmSm+..+ b0]+Mн.у.(S)
X(S) = G(S) W(S)
W(S)= X(S)/G(S) – передаточная функция ЛДС – это отношение изображений выходного сигнала к входному при нулевых начальных условиях.
D(p) совпадает с D(S)
M(p) совпадает с M(S)
Передаточная функция может быть детализирована по 2-м направлениям: 1.типовые звенья 2.представление в виде нулей и полюсов
2
3. Основные характеристики типовых звеньев во временной и частотной областях.
g(t) |
W(s) |
x(t) |
G(s) |
|
X(s) |
|
|
|
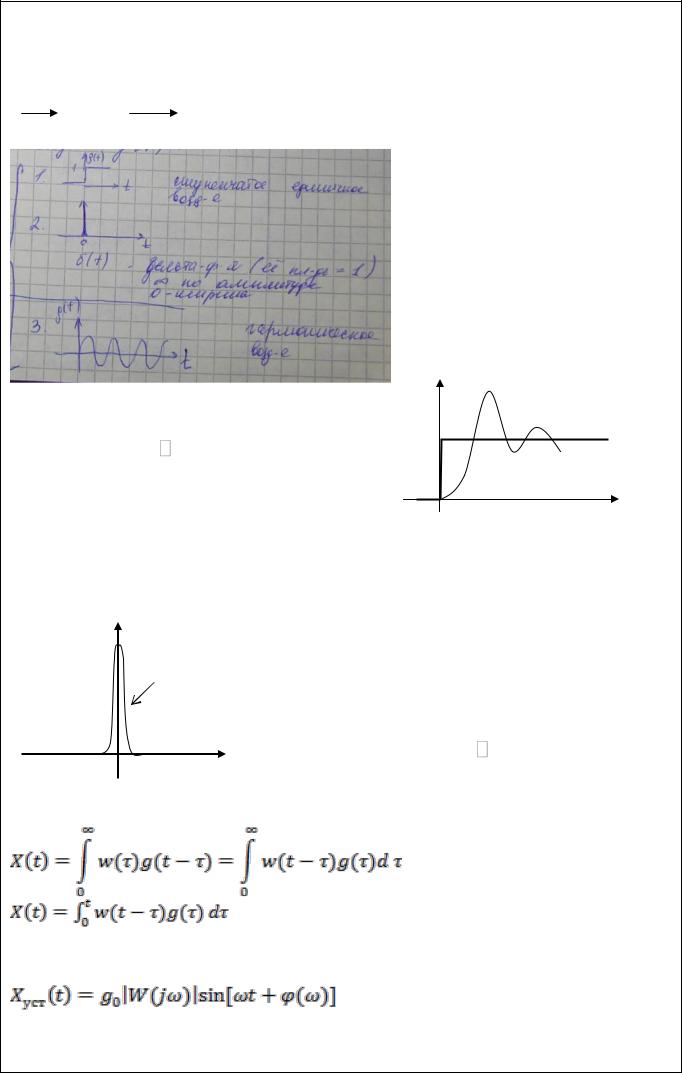
3 типа входных воздействий: - ступенчатое; - импульсное;
- гармоническое.
Переходная функция.
Реакция системы на ступенчатое входное воздействие называется
|
|
|
|
|
|
|
|
переходной функцией (h(t)). |
|
|
|
|
|
|
|
|
|
g(t) {0,t 0} 1[t] |
|
|
|
|
|
|
|
|
|
1,t 0 |
|
X (s) |
W (s) |
|
|
|
g(t) |
||||
|
|
s |
|
|
|
|
|
||
|
|
|
|
|
|
|
|||
x(t) L 1[ X (s)] |
1 |
|
W (s) |
est ds h(t) |
|||||
|
|
||||||||
2 j |
s |
||||||||
(преобразование Лапласа) |
t |
||||||||
G(s) |
1 |
|
|
|
|
|
|||
- единичное ступенчатое воздействие |
|||||||||
|
|||||||||
|
s |
|
|
|
|
||||
Весовая функция ЛДС.
Реакция системы на импульсное входное воздействие называется весовой функцией. g(t) = 1*(t-0)
g(t) |
|
|
|
|
|
|
(t)dt 1 |
|
|
||
|
|
|
|
||
(t) |
|
|
|
||
амплитуда бесконечна. |
|
|
|||
|
|
|
|
||
|
|
L [ (t)] = 1 |
|
|
|
|
|
G(s) = 1 |
|
|
|
|
t |
x(t) L 1[ X (s)] L 1[W (s)] |
1 |
W (s)est ds w(t) |
|
2 j |
|||||
|
|
|
|
||
w(t) – весовая функция ЛДС (импульсная переходная
функция).
– реакция имп. системы при нулевых начальных условиях.
Реакция на гармоническое воздействие
На вход подается гармоническое воздействие: g(t)=g0sin ωt, ω=const
3

Амплитудно-фазовая характеристика.
На вход подается гармоническое воздействие: g(t)=g0sin ωt, ω=const
|
|
|
W ( j ) |
b |
( j )m ... b |
j b |
P( ) jQ( ) |
|
|
|
|||||
W (s) |
|
|
m |
1 |
0 |
||
s1 |
j |
a |
( j )n ... a |
j a |
|||
|
|
|
|
||||
|
|
|
|
n |
1 |
0 |
|
0 < +
P( ) – вещественная ЧХ, Q( ) – мнимая ЧХ. Амплитудно-фазовая ЧХ:
jv
Q( ) |W(j )|
( )>0
u
0
P(j )
Типичный случай АФЧХ: jv
k
u
3 |
|
1 |
||
|
2 |
|||
|
|
; ( ) argW ( j ) arctg |
Q( ) |
|
|W ( j ) | |
P2 () Q2 () |
|||
P( ) |
||||
|
|
|
||
4
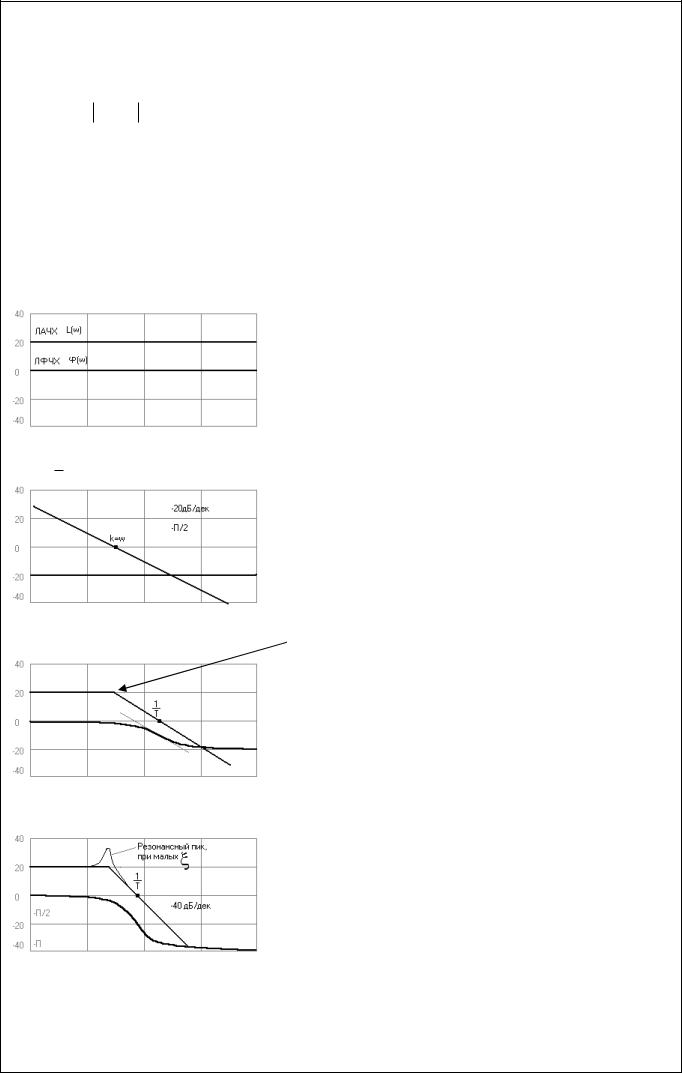
4.Логарифмические частотные характеристики типовых звеньев, минимально-фазовые и неминимально-фазовые типовые звенья.
L( ) 20 lg w( j ) логарифмическая амплитудно-частотная хар-ка, дБ(децибел)
W (S) |
k(s |
1 )...(s m ) |
i – полюсы 1,..n |
i -нули 1,..m m<=n |
|
(s 1 )...(s n) |
|||||
|
|
|
|||
2
Наиболее часто встречающиеся звенья со множителем, типовые звенья: W (S) wi (s)
i 1
Типовые звенья делятся на минимально-фазовые(поведения амплитуды и фазы строго согласовано, есть закономерность) и неминимально-фазовые(несвязанны между собой, нет между ними закономерности).
Во всех графиках перегибы в точке 1/Т !
I. Минимально-фазовые звенья: (график: L(w) по вертикали и w,c-1 по горизонтали) 1) Усилительное звено
W(s)=k k>0,коэффициент передачи. Высота линии на рисунке 20lgk
2) Интегрирующее звено { L(w) 20log k * lg w }
W (s) ks
|
|
|
Наклон -20дБ/декада |
3) Апериодическое звено |
|
||
W (s) |
k |
погрешность 3дБ |
|
|
|
||
Ts 1 |
|||
4) Колебательное звено
W (s) |
k |
|
|
||
T 2 s 2 2 Ts 1 |
||
|
Если 0,4≤ζ≤0,7 погрешность =+/-3дБ при ζ=1 колебательное звено исчезает и появляется 2 апериодических 5) Дифференцирующее звено 1-го порядка
W (s) k( s 1)
5

6) Дифференцирующее звено 2-го порядка
W (s) k( 2 s2 2 s 1)
{7) Звено «чистого» дифференцирования (дифференцирующее звено)
W(s)=ks}
{Свойство минимально-фазовых звеньев +-n->+-(pi/2)*n} II. Неминимально-фазовые звенья:
1) Неустойчивое апериодическое звено
W (s) k Ts 1
2) Неустойчивое колебательное звено
W (s) |
k |
(присутствует как минимум один минус) |
T 2 s 2 2Ts 1 |
3)Дифференцирующее звено 1-го порядка
W(s)=k(1-τs)
4) Дифференцирующее звено 2-го порядка
W (s) k(1 2s 2 s2 )
5) Звено «чистого» запаздывания
W(S)=e-τs
6
5. Алгебраические критерии устойчивости.
Представим характеристическое уравнение системы в виде
an*Sn + an-1*Sn-1 + … + a1*S + a0 = 0
Критерий Рауса
1.в первой строке записываются коэффициенты уравнения с чётными индексами в порядке их возрастания
2.во второй строке — с нечётными
3.остальные элементы таблицы определяется по формуле:  ,
,
где 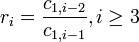 — номер строки,
— номер строки,  — номер столбца 4. число строк таблицы Рауса на единицу больше порядка характеристического уравнения
— номер столбца 4. число строк таблицы Рауса на единицу больше порядка характеристического уравнения
Значения r |
Номер |
Номер столбца |
|
|
|
|
строки |
1 |
2 |
3 |
… |
- |
1 |
an |
an-2 |
an-4 |
… |
- |
2 |
an-1 |
an-3 |
an-5 |
… |
r0=an/an-1 |
3 |
c13=an-2-r0*an-3 |
c23=an-4-r0*an-5 |
c33=an-6-r0*an-7 |
… |
r1=an-1/c13 |
4 |
c14=an-3-r1*c23 |
c24=an-5-r1*c33 |
c34=an-7-r1*c43 |
… |
r2=c13/c14 |
5 |
c15=c23-r2*c24 |
c25=c33-r2*c34 |
c35=c43-r2*c44 |
… |
r3=c14/c15 |
6 |
c16= c24-r3*c25 |
c26=c34-r3*c35 |
c36=c44-r3*c45 |
… |
Необходимым и достаточным условием того что все Reλi<0 (а значит и устойчивости) является положительность коэффициентов первого столбца.
{1+Kp*W(S)=0
Kp – предельный коэффициент усиления.}
Критерий Гурвица.
Из коэффициентов характеристического уравнения строится матрица Гурвица по алгоритму:
1)по главной диагонали слева направо выставляются все коэффициенты характеристического уравнения от a[n-1] до a[0];
2)от каждого элемента диагонали вверх и вниз достраиваются столбцы определителя так,
чтобы индексы убывали сверху вниз;
3) на место коэффициентов с индексами меньше нуля или больше  ставятся нули.
ставятся нули.
an-1 |
an |
0 |
0 |
… |
0 |
an-3 |
an-2 |
an-1 |
an |
… 0 |
|
an-5 |
an-4 |
an-3 |
an-2 |
… |
0 |
…………………………………………………..
0 0 0 0 … a0
Необходимым и достаточным условием устойчивости является положительность всех диагональных миноров данной матрицы:
a[n-1], a[n-1]*a[n-2] – a[n-3]*a[n] и т.д.
Пример а)
при T1 = 0.1, T2 = 0.2.
7
Пример б)
при T1 = 0.1, T2 = 0.2.
8
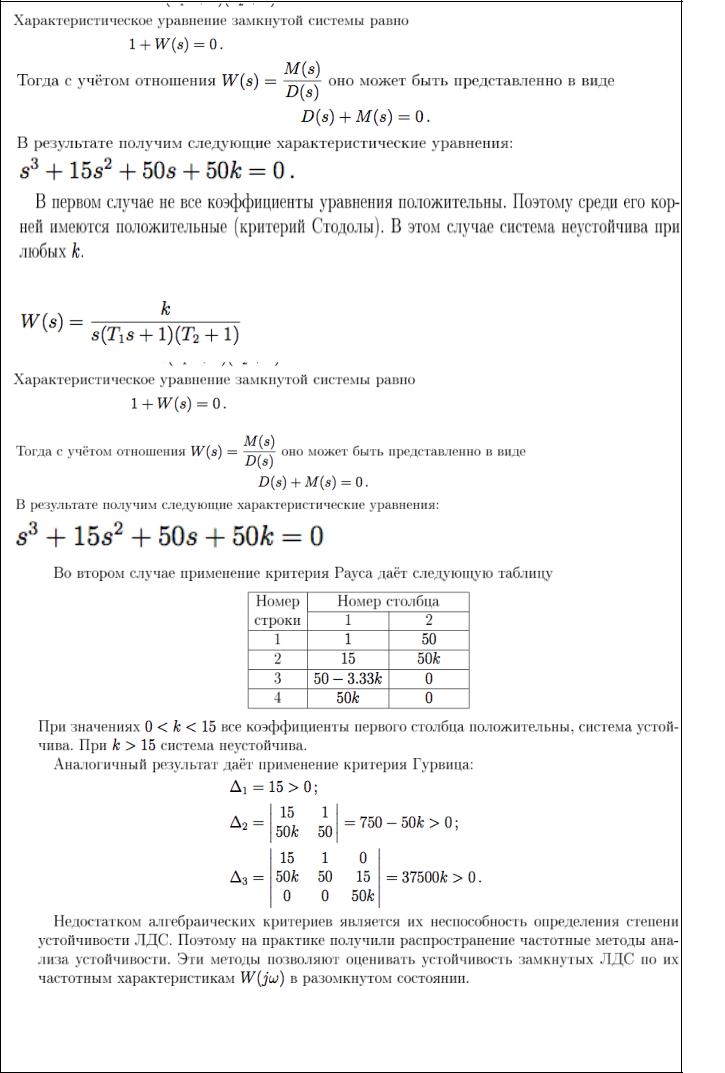
6. Частотный критерий Найквиста.
Недостаток алгебраических методов состоит в том что по ним нельзя определить степень устойчивости. {Изменение аргумента для сомножителя соответствующего 1 т.е для полюсов: Re <0 приращение аргумента =+ , а для полюсов в правой полуплоскости = - .
Полное изменение аргумента arg D(j ) = i
arg D(j ) = arg(j - i) изменение аргумента каждой из компонент n – порядок системы, m – колтчество полюсов в правой полуплоскости
arg(D(j ))=(n-m) -m =(n-2m) при изменяющемся от - до +
Для устойчивых систем m=0, arg(D(j ))=n . Если изменить диапазон (т.к отрицательных частот не бывает и Д(jw)симметрично отн-но вещ-ой оси), то получим при (0 + ) arg(D(j ))= n /2}
Критерий Найквиста
Для чтобы ЛДС была устойчива в замкнутом состоянии необх и достаточно чтобы ее годограф в разомкнутом состоянии охватывал критическую точку (- ;j0) при [0, + ] +m/2 раз, где m –
число полюсов разомкнутой системы в правой полуплоскости. Число охватов можно заменить числом пересечений. Достаточно рассмотреть отрезок вещественной оси (- ; (-1;j0)).
Критерий Найквиста: ЛДС уст в замкн сост общее число пеерходов АФЧХ разомкнутой сист через отрезок действительной оси (- ;-1) при изменении частоты от 0 до + было равным +m/2
Учет нулевого полюса будем считать что нулевой полюс находится в левой полуплоскости. Тогда заменим s на ej где 0, меняется от 0 до /2. Подставляем это в W(s) и получаем доопреджеление годографа, так чтобы он начинался на действительной оси.
Критерий Найквиста: Для того чтобы ЛДС была устойчивой в замкнутом сост. необх и дост чтобы общее число пересечений фазовой х-ки и оси (-180 -k*360 ) в области положительных амплитуд (L( )>0) при изменении частот от 0 до + было равным +m/2
∑число пересеч (-1800) = k/2, к – число полюсов системы в правой полупллоскости.
Пример:
9
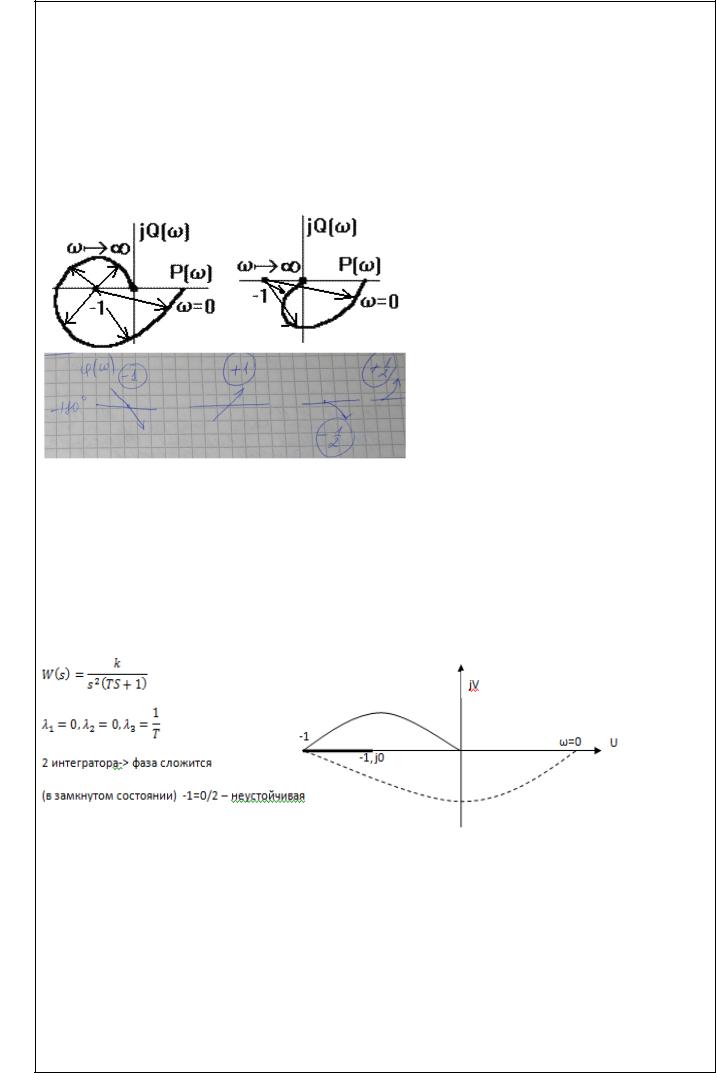
7. Показатели качества систем управления.
1)Время регулирования.
Подается ступенчатое воздействие.
tр – время вхождения в коридор (5 процентный), после которого функция уже не выйдет из него.
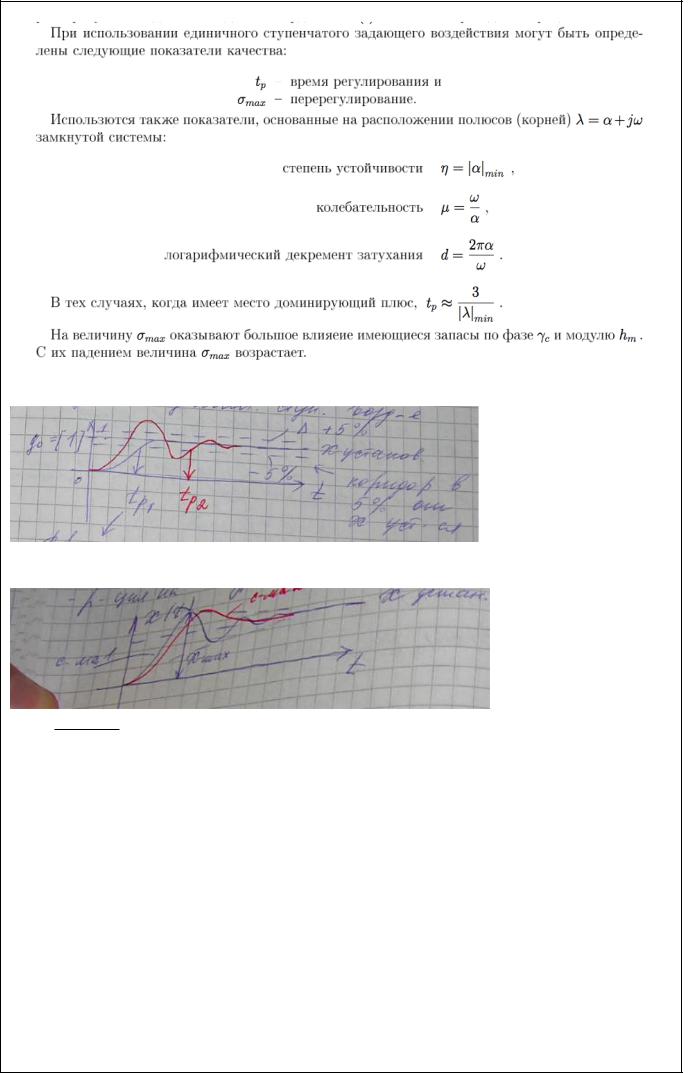
2) Перерегулирование – характеристика процесса , снабженная той или иной сигмой.
max xmax x( ) 100% .Чем ближе полюса к вещественной оси тем меньше xmax. x( )
Сигма и tp определяются полюсами. Расположение полюсов влияет на показатели качества. Чем ближе полюса, тем меньше колебательность. Чем меньше запасы, тем больше перерегулирование.
10