

Приложение д Обработка данных в двумерном лазерном триангуляторе при больших отклонениях от круглости
В данном приложении подробно описан и обоснован вывод расчетных формул способом триангуляции с использованием зеркально отраженного излучения при значительных амплитудах отклонения от круглости в их радиальном профиле [19].
Рассматриваемые в данной работе контролируемые изделия имеют вид тела вращения с криволинейной наружной поверхностью:
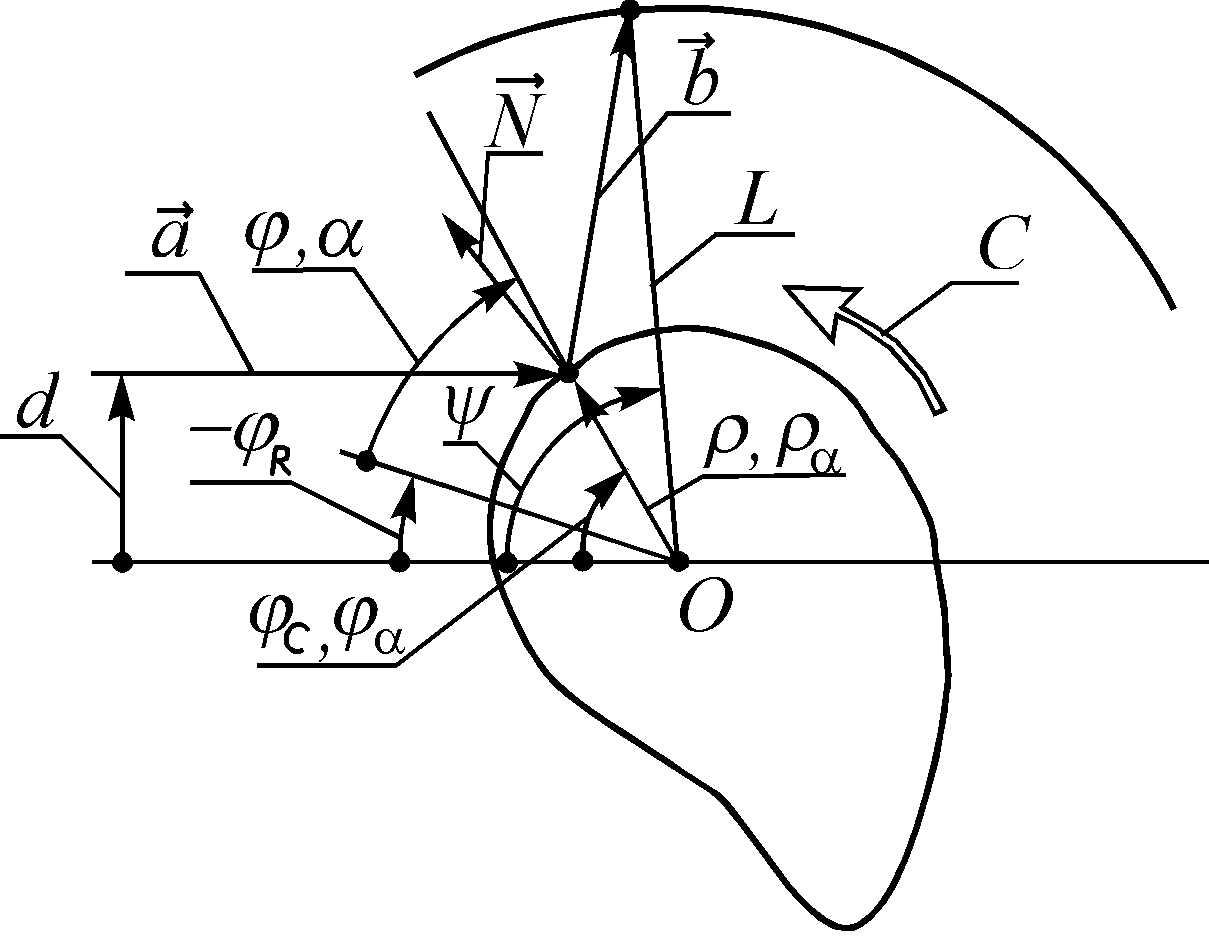
На рисунке Д.1 изображена тестируемая поверхность в зоне оптического контроля. Схема измерений похожа на ту, которая приведена на рисунках 2 и 3 (см. раздел 1).
|
|
|
|
1 ‑ источник излучения; 2 ‑ контролируемая поверхность; 3 ‑ ПЗС-фотоприемник; AB,C ‑ направления сканирования поверхности Рисунок Д.1‑ Оптико-механическая схема координатных измерений при больших отклонениях от круглости | |

Из
исходной системы уравнений путем
линейных преобразований нами ранее
были получены [5] два дифференциальных
уравнения. Они связывают
![]() и его первую производную по какой-либо
другой координате ‑
и его первую производную по какой-либо
другой координате ‑![]() или
или![]() ,
см. (А.5):
,
см. (А.5):
|
|
(Д.1) |
где
![]() ‑
угол поворота контролируемого объекта;
‑
угол поворота контролируемого объекта;
![]() ‑
смещение источника излучения;
‑
смещение источника излучения;
![]() и
и![]() ‑ функции четырех переменных.
‑ функции четырех переменных.
Переменные
![]() ,
,![]() задаются независимо, известным способом.
Их отсчет ведем в той же выбранной нами
системе цилиндрических координат
оптической схемы. Переменная
задаются независимо, известным способом.
Их отсчет ведем в той же выбранной нами
системе цилиндрических координат
оптической схемы. Переменная![]() ‑ неизвестна. Переменная
‑ неизвестна. Переменная![]() легко определяется благодаря выбранной
пространственной конфигурации оптической
схемы. Напомним, что
легко определяется благодаря выбранной
пространственной конфигурации оптической
схемы. Напомним, что![]() ‑
координата освещенной точки поверхности
в системе координат сканера; отметим,
что при измерениях по радиальному
профилю контролируемая поверхность
вращается, а зондирующий луч –
неподвижен
‑
координата освещенной точки поверхности
в системе координат сканера; отметим,
что при измерениях по радиальному
профилю контролируемая поверхность
вращается, а зондирующий луч –
неподвижен
Из (Д.1) получаем дифференциальные уравнения относительно неизвестного радиуса измеряемой поверхности в ее освещенной точке:
|
|
(Д.2) |
При этом левые части
уравнений представляем как производные
неявной функции радиуса
![]() ,
зависящей от переменных
,
зависящей от переменных![]() и
и![]() и определяемой уравнением поверхности
(А.1).
и определяемой уравнением поверхности
(А.1).
Запишем
уравнения (Д.2) в системе координат
![]()
![]() ,
,![]() ,
,![]()
![]() ,
связанной с контролируемой поверхностью.
Уравнения связи между системами координат
имеют вид:
,
связанной с контролируемой поверхностью.
Уравнения связи между системами координат
имеют вид:
|
|
(Д.3) |
где
![]() ‑ угловая координата, связанная с
поворотом контролируемой детали.
‑ угловая координата, связанная с
поворотом контролируемой детали.
Она отсчитывается в
системе координат оптического
преобразователя и выбирается такой,
чтобы в начале отсчета выполнялось
условие
![]() .
Она изменяется с поворотом поверхности
при сканировании в соответствии
с формулой:
.
Она изменяется с поворотом поверхности
при сканировании в соответствии
с формулой:
|
|
(Д.4) |
где
![]() ‑ постоянная величина угла.
‑ постоянная величина угла.
Ее мы ввели для удобства
расчетов. Принимаем также, что величина
угла
![]() изменяется в процессе сканирования
от 0 до
изменяется в процессе сканирования
от 0 до![]() ,
или до минус
,
или до минус![]() радиан, в зависимости от направления
сканирования.
радиан, в зависимости от направления
сканирования.
Уравнения (Д.2) переходят в следующие уравнения:
|
|
(Д.5) |
Функция вида
![]() является частным решением любого из
них в отдельности. Из нее, используя
(Д.3) и очевидное соотношение (см. также
(А.5))
является частным решением любого из
них в отдельности. Из нее, используя
(Д.3) и очевидное соотношение (см. также
(А.5))
|
|
(Д.6) |
можно получить профиль
радиуса
![]() в системе координат контролируемой
поверхности, а из сетки таких профилей
‑ и изображение всей поверхности.
в системе координат контролируемой
поверхности, а из сетки таких профилей
‑ и изображение всей поверхности.
Для
нахождения решения перейдем от уравнений
(Д.5) к уравнениям, содержащим
дифференцирование только по независимым
переменным
![]() и
и![]() .
При этом, в отличие от уравнений (Д.5), их
левые части представим, как производные
радиуса именно освещенной точки
поверхности. Ее координаты в системе,
связанной с контролируемой поверхностью,
обозначим как
.
При этом, в отличие от уравнений (Д.5), их
левые части представим, как производные
радиуса именно освещенной точки
поверхности. Ее координаты в системе,
связанной с контролируемой поверхностью,
обозначим как![]()
![]() ,
,![]() ,
,![]()
![]() .
Они удовлетворяют уравнениям (Д.5). В
схеме устройства угловую координату
рассматриваемой точки мы обозначим как
.
Они удовлетворяют уравнениям (Д.5). В
схеме устройства угловую координату
рассматриваемой точки мы обозначим как![]() .
При этом для радиусной и осевой координат
этой точки в схеме устройства мы новые
обозначения не вводим, так как при выводе
формул они нам не нужны. Подставляя в
(Д.3) и (Д.4) вместо
.
При этом для радиусной и осевой координат
этой точки в схеме устройства мы новые
обозначения не вводим, так как при выводе
формул они нам не нужны. Подставляя в
(Д.3) и (Д.4) вместо![]() величину
величину![]() и вместо
и вместо![]() величину
величину![]() ,
имеем:
,
имеем:
|
|
(Д.7) |
Получим
дифференциальные уравнения, связывающие
искомый радиус
![]() контролируемой поверхности в ее
освещенной точке с задаваемыми нами
углом
контролируемой поверхности в ее
освещенной точке с задаваемыми нами
углом![]() поворота этой поверхности вокруг оси
поворота этой поверхности вокруг оси![]() и смещением
и смещением![]() источника излучения.
источника излучения.
Представим
![]() как сложную функцию
как сложную функцию
|
|
(Д.8) |
где
![]() и
и![]() .
Согласно правилу вычисления производной
сложной функции
.
Согласно правилу вычисления производной
сложной функции
|
|
(Д.9) |
Очевидно, что для точек на контролируемой поверхности
|
|
(Д.10) |
В соответствии с (Д.7)
|
|
(Д.11) |
Из (Д.6) имеем
|
|
(Д.12) |
Тогда
|
|
(Д.13) |
 .
.Подставив первое из уравнений (Д.5), а также полученное соотношение (Д.13) в (Д.9), получаем в итоге дифференциальное уравнение следующего вида:
|
|
(Д.14) |
 .
.Оно относится к
нелинейным дифференциальным уравнениям
в частных производных первого порядка.
Так как в него входит только одна частная
производная, и к тому же выраженная в
явном виде, то его можно считать и
обыкновенным дифференциальным уравнением.
Решая его при каком-либо постоянном
![]() ,
получаем функцию
,
получаем функцию![]() ,
от которой, используя (Д.3), (Д.4), (Д.6) и
(Д.14), переходим к
,
от которой, используя (Д.3), (Д.4), (Д.6) и
(Д.14), переходим к![]() при заданном
при заданном![]() .
Граничное условие имеет вид:
.
Граничное условие имеет вид:
|
|
(Д.15) |
где
![]() ‑ смещение источника излучения вдоль
оси
‑ смещение источника излучения вдоль
оси![]() от некоторого начального уровня.
от некоторого начального уровня.
При
задании
![]() должны выполняться два условия: первое ‑
попадание зондирующего луча на
контролируемую поверхность и второе ‑
возможность детектирования этого луча
фотоприемником после отражения его от
контролируемой поверхности.
должны выполняться два условия: первое ‑
попадание зондирующего луча на
контролируемую поверхность и второе ‑
возможность детектирования этого луча
фотоприемником после отражения его от
контролируемой поверхности.
Итак, уравнение (Д.14) с граничными условиями (Д.15) имеет единственное решение, когда контролируются зеркально отражающие поверхности вращения, имеющие значительные отклонения от круглости, сравнимые с их средним радиусом в том же радиальном профиле.
Проведя переход, аналогичный проделанному, но уже от второго из уравнений (Д.5), получаем:
|
|
(Д.16) |
 .
.Для этого уравнения граничное условие находится из (Д.14). Решение уравнения (Д.16) дает профиль сечения измеряемой поверхности плоскостью, в которой перемещается падающий световой луч.
Таким образом, ориентация профилей сечений измеряемой поверхности, являющихся решениями дифференциальных уравнений (Д.14) или (Д.16), определяется левыми частями этих уравнений.
Итак, приведен вывод дифференциального уравнения (Д.14) для точного восстановление радиального профиля, в рамках использованной нами физической модели (см. раздел 1).
В заключение этого приложения приведем полезные ссылки на литературные источники, которые важны для проектирования АСНИ в рассматриваемой нами задаче.
Так, в дополнение к ГОСТ 24642-81 «Допуски формы и расположения поверхностей. Основные термины и определения» [4] требуется также испольльзование ГОСТ 24643-81 «Допуски формы и расположения поверхностей. Числовые значения» [29].
Оформление результатов дипломного проектирования в СГАУ следует проводить согласно СТО СГАУ 02068410-009-2007 «Обработка и оформление результатов измерений» [30], который базируется на известном ГОСТ 2.105-95 (ссылку можно найти самостоятельно).
И наконец, учебное пособие, преставленное вашему вниманию, уважаемые читатели, во многом основано на диссертационной работе О. А. Заякина [31]. В случае каких-либо затруднений вы можете обратиться к первоисточнику, там все проверено более тщательно.
Успехов вам!