

Введение производной в закон регулирования
Динамические свойства системы регулирования можно улучшить введением производной от регулируемой величины в закон управления. Примером введения производной в закон регулирования является охват одного или нескольких звеньев отрицательной обратной связью, в цепи котopoй стоит дифференцирующее звено с передаточной функцией W(P)=кр. Такая связь называется скоростной ОС. Характерной особенностью скоростной ОС является то, что сигнал обратной связи действует лишь при изменении выходного сигнала. А при постоянном выходном сигнале сигнал ОС равен нулю. По этой причине такая связь иногда называется гибкой. Рассмотрим влияние гибкой ОС на колебательное звено.

Рис. 5.3 Колебательное звено, охваченное гибкой обратной связью
Находим передаточную функцию.
 .
.
Видно, что колебательное звено, охваченное скоростной ОС, остается колебательным, но изменяется параметр d , характеризующий скорость затухания колебательного звена:
![]()
![]()
![]() .
.
Таким образом, скоростная обратная связь устраняет или ослабляет колебания регулируемого параметра при переходе из одного установившегося состояния к другому, а также уменьшает перерегулирование (см. рис. 5.4).
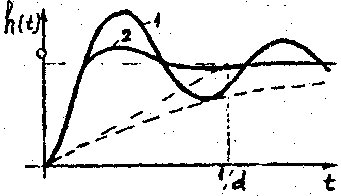
Рис. 5.4 Переходные характеристики:
1 - без гибкой ОС; 2- с гибкой ОС.
Скоростная обратная связь в системах регулирования реализуется, например, с помощью тaxoгенераторов, измеряющих скорость вращения вала исполнительного устройства в сервоприводах. В автопилотах для устранения колебаний самолета в скоростную обратную связь устанавливают дифференцирующее звено в виде датчика угловых скоростей (ДУС).
Введение изодромной обратной связи
Если
в цепи обратной связи стоит реальное
дифференцирующее
звено с передаточной
функцией
![]() ,
то такая обратная
связь называется изодромной.
,
то такая обратная
связь называется изодромной.

Рис.5.5 Включение изодромного звена в обратную связь.
Применение изодромной обратной связи позволяет не только создать эффект введения сигналов по производной, но и уменьшить влияние постоянных времени звеньев, охваченных ОС. В целом изодромная обратная связь сочетает полезныесвойства ЖОС и скоростной ОС.
Чтобы определить свойства изодромной ОС, рассмотрим амплитудно-частотные характеристики реального дифференцирующего звена. Заменив в передаточной функции значение р на jw
Рис.5.6
Амплитудно-частотная характеристика
реального дифференцирующего звена

![]() ;
;
![]() .
.
Амплитудно-частотная характеристика приведена на рис. 5.6.
Она показывает, что при неизменном значении регулируемого параметра ω=0, передаточная функция звена в обратной связи W(ω)=0, что соответствует отсутствию обратной связи.
При ω→∞, W(ω)→β,что эквивалентно наличию жесткой обратной связи с коэффициентом β, обеспечивающим устойчивость.
Рассмотрим два примера.

Рис. 5.7 Интегрирующее звено, охваченное изодромной обратной связью

То есть включение изодромной обратной связи эквивалентно подключению последовательно форсирующего звена.
Следует отметить, что изодромная ОС не делает интегрирующее звено апериодическим, а лишь подключает последовательно пропорциональное звено. В результате система остается астатической, в то же время устойчивой.
Пример 2. Параллельное подключение изодромного звена.

Рис. 5.7 Параллельное подключение изодромного звена
![]() при
при
![]()
![]()
![]() .
.
Таким образом, включение реального дифференцирующего звена параллельно апериодическому превращает его в пропорциональное звено с тем же коэффициентом передачи, то есть делает инерционное звено безинерционным.
Лекция 6