

3. Статично невизначувані рами. Метод сил
Рама є статично невизначуваною, якщо реакції в опорах та внутрішні силові фактори в поперечних перерізах її стержнів не можуть бути визначені тільки з рівнянь статики.
Для розкриття статичної невизначуваності рами складаються рівняння сумісності деформацій, які виражають ту думку, що переміщення опорних точок рами у вказаних напрямах або відносне переміщення точок в перерізах відомі, зокрема, рівні нулю. Звідси ми приходимо до системи канонічних рівнянь, число яких відповідає ступеню статичної невизначуваності рами.
Приступаючи до розрахунку статично невизначуваної рами, слід встановити ступінь її статичної невизначуваності. Наприклад, рама, зображена на рис. 6 а, є тричі статично невизначуваною: число невідомих реактивних сил рівне шести (у кожному закріпленні по три), а рівнянь статики для плоскої довільної системи сил можна записати тільки три. Число невідомих перевищує число рівнянь статики ( 6 - 3 = 3 ). Таким чином, дана рама має три "зайві" в'язі. Ступінь статичної невизначуваності дорівнює трьом. Відкинувши ці "зайві" в'язі, одержимо так звану основну систему (рис. 6 б).
Для кожної статично невизначуваної системи можна підібрати, як правило, декілька основних систем.
Якщо до основної системи прикласти задане навантаження і невідомі реакції відкинутих "зайвих" в'язів і зажадати виконання умов переміщень поперечного перерізу D : 1 = 0, 2 = 0, 3 = 0 (тут 1, 2 - переміщення перерізу D в напрямах сил X1 і Х2 відповідно 3 - поворот перерізу у напрямі моменту Х3), то ми одержимо так звану еквівалентну систему (рис. 6 в), яка за деформаціями і напруженнями, що виникають в перерізах стержнів рами, буде еквівалентна початковій, заданій системі.
Невідомі реакції відкинутих в'язей визначаються з канонічних рівнянь. Для рами, представленої на рис. 6 а, система канонічних рівнянь має вигляд:
1 = 11X1 + 12X2 + 13X3 + 1P = 0,
2 = 21X1 + 22X2 + 23X3 + 2P = 0,
3 = 31X1 + 32X2 + 33X3 + 3P = 0,
тут X1, X2, X3 реакції відкинутих "зайвих" в'язів.

 Два
індекси при кожному з переміщень
означають: перший - напрям
переміщення точки прикладання
сили, другий - під впливом якої сили
виникло переміщення. Так, для приведеної
вище рами: 11
- переміщення точки прикладання
сили X1
(переріз D)
в напрямі цієї же сили від одиничної
сили X1
(одиничні
сили, що прикладаються у напрямі сил
X1,
X2,
X3
позначатимемо
X1,
X2,
X3);
13
- переміщення того ж перерізу в напрямі
сили X1
під дією одиничної
сили, прикладеної замість сили X3
; тобто від одиничного
моменту X3
=
1
; 21
- переміщення точки прикладання
сили X2
по її напряму
від дії одиничної
сили X1,
1P
- переміщення точки прикладання
сили X1
(переріз D)
по її напряму
від заданого навантаження і т.д.
Два
індекси при кожному з переміщень
означають: перший - напрям
переміщення точки прикладання
сили, другий - під впливом якої сили
виникло переміщення. Так, для приведеної
вище рами: 11
- переміщення точки прикладання
сили X1
(переріз D)
в напрямі цієї же сили від одиничної
сили X1
(одиничні
сили, що прикладаються у напрямі сил
X1,
X2,
X3
позначатимемо
X1,
X2,
X3);
13
- переміщення того ж перерізу в напрямі
сили X1
під дією одиничної
сили, прикладеної замість сили X3
; тобто від одиничного
моменту X3
=
1
; 21
- переміщення точки прикладання
сили X2
по її напряму
від дії одиничної
сили X1,
1P
- переміщення точки прикладання
сили X1
(переріз D)
по її напряму
від заданого навантаження і т.д.






 q B
M
C
q B
M
C
a)
h h
A D
 M
M
В а С q B C
б) в)
X3 X2
А D A X1
Рис. 6.
За теоремою про взаємність переміщень 21 = 12, 31 = 13, 32 = 23 . Отже, визначенню підлягають тільки переміщення 11, 12, 13, 22, 23, 33, 1P, 2P, 3P.
Переміщення 11, 22, 33 (з однаковими обома індексами) називають головними переміщеннями, вони завжди позитивні. Переміщення з різними індексами називають побічними, а переміщення 1P, 2P, 3P - вантажними. Побічні і вантажні переміщення можуть бути позитивними, негативними і рівними нулю.
Переміщення, що входять в канонічні рівняння, визначають, користуючись інтегралами Мора безпосередньо або обчислюючи їх способом Верещагіна.
Індекси переміщень указують також, які епюри згинальних моментів, побудовані для основної системи, слід перемножати, щоб одержати дане переміщення.
Розглянемо приклади.
Приклад 1. Розкрити статичну невизначуваність і побудувати епюру згинальних моментів для рами, зображеної на рис. 7 а.
 P
P
B l / 2 l / 2 C B l C
a) б)
l
VA
A HA = X1 A
 P
Pl
/ 4
P
Pl
/ 4
= Pl2 / 4 VC" = P / 2
l 2 HC' = 1
B C
в) г) B D HC" = 0 C
VC' = 1
l h = l / 2
h2
VA' = 1 1 VA" = P / 2
h1
A X1 = 1 A
 P
VC (13
/ 64)Pl
P
VC (13
/ 64)Pl
HC (3 / 32)Pl B
B D C D C
д) е)
x1
x2
y
VA
A HA = (3 / 32)P A
Рис. 7
Розв'язання. В опорах А і С є по дві невідомих складових реакцій. Оскільки для плоскої довільної системи сил можна скласти тільки три рівняння статики, то дана рама один раз статично невизначувана ( 2 + 2 - 3 = 1 ).
Основну систему виберемо як показано на рис. 7 б, тобто прийнявши за "зайву" горизонтальну складову реакції НА = X1 .
Канонічне рівняння для цього випадку матиме вигляд:
1 = 11X1 + 1P = 0
Основну систему завантажуємо в точці А в горизонтальному напрямі одиничною силою і, визначивши реакції опор від цієї сили (VA' = 1, HC' = 1, VC' = 1), будуємо епюру згинальних моментів - одиничну епюру (рис. 7 в).
 Для
обчислення
головного переміщення 11
способом Верещагіна
треба перемножити епюру
М1
(рис. 7
в)
саму на себе, тобто
Для
обчислення
головного переміщення 11
способом Верещагіна
треба перемножити епюру
М1
(рис. 7
в)
саму на себе, тобто
11 = (1h1 + 2h2) / (EJ) = [0,5l2(2 / 3)l + 0,5l2(2 / 3)l] / (EJ) = (2 / 3)l3 / (EJ).
Для обчислення вантажного переміщення 1P слід, заздалегідь, визначивши реакції опор (VA" = VC" = 0,5P, HC" = 0), побудувати вантажну епюру - епюру згинальних моментів від заданого навантаження ( сили Р ), прикладеного до основної системи.
Виконуючи перемножування площі вантажної епюри (рис. 7 г) на ординату h одиничної епюри, відповідної положенню центра тяжіння вантажної епюри (рис. 7 в), одержуємо
1P = - h / (EJ) = - (1 / 8)Pl20,5l / (EJ) = - Pl3 / (16EJ)
Знак "-" узятий у зв'язку з тим, що вантажна і одинична епюри розташовані по різні сторони від осі.
Підставляючи 11 і 1P у канонічне рівняння, одержуємо :
(2 / 3)l3X1 / (EJ) - Pl3 / (16EJ) = 0,
звідси
X1 = (3 / 32)P.
Оскільки одна з чотирьох невідомих реакцій опор визначена (і тим самим розкрита статична невизначуваність рами), решту невідомих реакцій визначимо, розглядаючи рівновагу статично визначуваної рами, представленої на рис. 7 д:
mC = 0, VAl - HAl - P0,5l = 0,
VA = HA + 0,5P = (3 / 32)P + 0,5P = (19 / 32)P,
X = 0, HA - HC = 0, HC = HA = (3 / 32)P,
Y = 0, VA - P + VC = 0,
VC = P - VA = P - (19 / 32)P = (13 / 32)P,
Побудуємо епюри згинальних моментів. Згинальний момент у стояку AВ викликається дією сили HA . В перерізі на відстані у від точки А маємо
M(y) = HAy = (3 / 32)Py,
звідси
MA = 0, MB = (3 / 32)Pl.
При побудові епюри згинальних моментів в рігелі ВС рухатимемося від точки С до точки В. У перерізі з координатою x1 вираз для згинального моменту має вигляд
M(х1) = VCx1,
звідси
MC = 0, MD = VC0,5l = (13 / 32)P0,5l = (13 / 64)Pl.
Згинальний момент в перерізі з координатою x2
M(х2) = VCx2 - P(x2 - 0,5l).
Звідси
MD = VC 0,5l = (13 / 64)Pl, MB = VCl - P(l - 0,5l) = - (3 / 32)Pl.
Оскільки значення згинальних моментів в точках D і В мають протилежні знаки, то при побудові епюри вони повинні бути відкладені по різні сторони від осі стержня. Підкреслимо, що епюри згинальних моментів будуються нами на стиснутих волокнах.
Результуюча епюра показана на рис. 7 е.
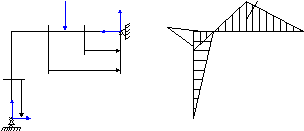
Приклад 2. Розкрити статичну невизначуваність і побудувати епюру згинальних моментів, поперечних і поздовжніх сил для рами, зображеної на рис. 8 а.
Розв'язування. Рама двічі статично невизначувана. За основну приймаємо статично визначувану систему, показану на рис. 8 б.
Канонічні рівняння методу сил мають вигляд:
11X1 + 12X2 + 1P = 0, 21X1 + 22X2 + 2P = 0.
 P
P
h / 2 2h h/2 2h
A B C A B C
a) б)
h h
VD = X1
D HD = X2 D
1
h1" = 2/3(2h)
h1' = h 2h
A B C
в)
D
X1 = 1
h h2 = h
A B C
г)
X2 = 1
D
P
A B C Ph / 2
д) 2 Ph
Ph / 2
p'
p"
D
Рис. 8

 Будуємо
в основній системі епюри
згинальних
моментів від сил X1
= 1
(рис. 8
в)
X2
= 1
(рис. 8
г)
і заданого навантаження (рис. 8
д).
Будуємо
в основній системі епюри
згинальних
моментів від сил X1
= 1
(рис. 8
в)
X2
= 1
(рис. 8
г)
і заданого навантаження (рис. 8
д).
 Переміщення
11
визначимо шляхом перемножування
способом Верещагіна
епюри
M1
самої на себе, тобто
Переміщення
11
визначимо шляхом перемножування
способом Верещагіна
епюри
M1
самої на себе, тобто
11 = 0,52h2h(2 / 3)(2h) / (EJ) = (8 / 3)h3 / (EJ).
 Аналогічно,
для визначення 22
потрібно
епюру
M2
перемножити саму на себе
Аналогічно,
для визначення 22
потрібно
епюру
M2
перемножити саму на себе
22 = [0,5hh(2 / 3)h + 2hhh] / (EJ) = (7 / 3)h3 / (EJ)

 Перемноживши
епюри
M1
і M2
способом Верещагіна,
визначимо переміщення 12
Перемноживши
епюри
M1
і M2
способом Верещагіна,
визначимо переміщення 12
12 = - 1h2 / (EJ) = - 0,52h2hh / (EJ) = - 2h3 / (EJ)
Знак "-" взятий тому, що перемножувані епюри розташовані по різні сторони від осьової лінії.
Для визначення вантажних переміщень слід площу вантажної епюри на дільниці ВС рігеля помножити на ординати одиничних епюр h1 і h2 відповідних положенню центра тяжіння площі вантажної епюри.
 При
визначенні переміщення 1P
площа
дільниці вантажної
епюри
для рігеля (рис. 8
д)
розбиваємо на складові 'Р
( на одиничній
епюрі
М1
центру тяжіння
цієї площі
відповідає ордината h'1
=
h)
і "Р
(на одиничній
епюрі
її
центру тяжіння відповідає ордината
h"1
=
(2
/ 3)(2h)
=
4h
/ 3
) .
При
визначенні переміщення 1P
площа
дільниці вантажної
епюри
для рігеля (рис. 8
д)
розбиваємо на складові 'Р
( на одиничній
епюрі
М1
центру тяжіння
цієї площі
відповідає ордината h'1
=
h)
і "Р
(на одиничній
епюрі
її
центру тяжіння відповідає ордината
h"1
=
(2
/ 3)(2h)
=
4h
/ 3
) .
1P = (-P'h'1 - P"h"2) / (EJ) = [- Ph2h - 2Ph2(4 / 3) h] / (EJ) = - (11 / 3)Ph3 / (EJ)
При визначенні переміщення 2P площу вантажної епюри (рис. 8 д) на дільниці рігеля ((Р = 3Рh2) перемножуємо на ординату h2 = h (рис. 8 г), - оскільки на даній дільниці всі ординати мають постійне значення, то немає необхідності визначати центр тяжіння дільниці вантажної епюри, тобто
2P = Ph2 / (EJ) = 3Ph2h / (EJ) = 3Ph3 / (EJ)
Після підстановки одержаних виразів для коефіцієнтів канонічних рівнянь 11 , 12 , 22, 1P , 2P і скорочення на загальний множник канонічні рівняння приймають вигляд:
(8 / 3)X1 - 2X2 - (11 / 3)P = 0, - 2X1 + (7 / 3)X2 + 3P = 0.
Розв'язавши цю систему рівнянь, одержуємо: X1 = 1,15P, X2 = - 0,3P.



 З
метою перевірки правильності визначення
реакцій опори D
необхідно по-іншому вибрати основну
систему. Наприклад так, як показано на
рис. 9
а.
Тоді еквівалентна система матиме вигляд,
представлений
на рис. 9
б.
Канонічні рівняння матимуть той же
вигляд,
але
X1
і X2
тепер означають
горизонтальну реакцію і момент в
затисненні С
, а 11,
12,
1P
- переміщення перерізу С
у напрямі сили X1,
викликані
одиничною
горизонтальною силою X1,
одиничним
моментом X2
і зовнішнім навантаженням - силою
Р
відповідно, а 21,
22,
2P
- переміщення того ж перерізу у напрямі
сили X2,
викликане
дією тих же чинників
- одиничної
сили X1,
одиничного
моменту X2,
зовнішнього навантаження (сили Р).
З
метою перевірки правильності визначення
реакцій опори D
необхідно по-іншому вибрати основну
систему. Наприклад так, як показано на
рис. 9
а.
Тоді еквівалентна система матиме вигляд,
представлений
на рис. 9
б.
Канонічні рівняння матимуть той же
вигляд,
але
X1
і X2
тепер означають
горизонтальну реакцію і момент в
затисненні С
, а 11,
12,
1P
- переміщення перерізу С
у напрямі сили X1,
викликані
одиничною
горизонтальною силою X1,
одиничним
моментом X2
і зовнішнім навантаженням - силою
Р
відповідно, а 21,
22,
2P
- переміщення того ж перерізу у напрямі
сили X2,
викликане
дією тих же чинників
- одиничної
сили X1,
одиничного
моменту X2,
зовнішнього навантаження (сили Р).





 Для
визначення переміщень, що входять в
канонічні рівняння, побудуємо
епюри
M1,
M2,
MР
(рис.
9
в,
г,
д).
Перед побудовою
цих
епюр
у кожному випадку заздалегідь визначаємо
реакції опор.
Для
визначення переміщень, що входять в
канонічні рівняння, побудуємо
епюри
M1,
M2,
MР
(рис.
9
в,
г,
д).
Перед побудовою
цих
епюр
у кожному випадку заздалегідь визначаємо
реакції опор.
Перемножуючи відповідні епюри за правилом Верещагіна, одержуємо:
11 = [0,52hh(2 / 3)h + 0,5hh(2 / 3)h] / (EJ) = h3 / (EJ),
12 = 0,52hh(1 / 3)h / (EJ) = h2 / (3EJ),
22 = 0,52h1(2 / 3) / (EJ) = 2h / (3EJ),
1P = - 0,52h0,5Ph(2 / 3)h / (EJ) = - Ph3 / (3EJ),
2P = - 0,52h0,5Ph(1 / 3) / (EJ) = - Ph2 / (6EJ).
Знак "-" в останніх виразах взятий у зв'язку з тим, що перемножуються епюри, розташовані по різні сторони від осьової лінії.
Після підстановки цих переміщень в канонічні рівняння і скорочення на відповідний множник одержуємо:
hX1 + (1 / 3)X2 - (1 / 3)Ph = 0, hX1 + 2X2 - 0,5Ph = 0,
звідки
X1 = 0,3P, X2 = 0,1Ph.
Використовуючи рівняння статики, знайдемо реакції в опорі D (рис. 10):
Значення реакцій HD і VD співпадають з раніше одержаними, тому можна вважати, що вони визначені правильно.
Побудуємо тепер епюри поздовжніх і поперечних сил, згинальних моментів для статично визначуваної рами, представленої на рис. 11 а.
P
 A h/2 B 2h
C X2
C
A h/2 B 2h
C X2
C
X1
A B
a) б)
h
D D
(2/3)h V'C = 0,5
h
X1 = 1
в)
(2/3)h
H'D = 1 V'D = 0,5
2/3 1
1/3
г) X2 = 1
V"C = 0,5 / h
H"D = 0 V"D = 0,5 / h
P
д)
0.5Ph V"'C = 0,25P
H"'D = 0 V"'D = 1,25P
Рис. 9
 P M
=
0,1Ph
VC
P M
=
0,1Ph
VC
A h/2 B 2h C
0,3P
h
VD
D HD
Рис. 10
X = 0, 0,3P + HD = 0, HD = -0,3P,
mC = 0, P2,5h - VD2h + HDh + 0,1Ph = 0, VD = 1,15P.
Побудова епюр поздовжніх сил. Користуючись правилом визначення поздовжньої сили в перерізі, витікаючим з методу перерізів, встановлюємо, що стержень ВD стискується зусиллям 1,15Р, а стержень ВС - розтягується зусиллям 0,3Р. У стержні АВ поздовжні зусилля не виникають. Епюра поздовжніх сил представлена на рис. 11 б.
Побудова епюри поперечних сил. Поперечні сили виникають в усіх перерізах рами. Переміщуючись вздовж стержня АС, виявляємо, що в поперечних перерізах дільниці АВ виникатиме поперечна сила, рівна Р, у вузлі В матимемо стрибок вгору на величину реакції VD = 1,15Р, а в перерізах дільниці ВС поперечна сила дорівнюватиме 0,15P. У перерізах стержня ВD поперечна сила дорівнює реакції HD = 0,3Р. Епюра поперечних сил представлена на рис. 11 в.
Побудова епюри згинальних моментів. Нагадаємо, що епюра будується на стиснутих волокнах. Для ділянки АВ рігеля (рис. 11 а) вираз для згинального моменту має вигляд:
M(x1) = - Px1 x1 [0, 0,5h),
звідси
MА = 0, MВл = - 0,5Ph.
У точці В має місце стрибок на величину моменту HDh = 0,3Ph, тому після точки В згинальний момент буде дорівнювати
MВп = - 0,5Ph + 0,3Ph = - 0,2Ph.
У перерізах ділянки ВС рігеля вираз для згинального моменту має вигляд
P 0,3P
0,3P
A h/2 B 2h C A B C
a) x1 б)
x2 1,15P
y
HD = 0,3P D
D VD = 1,15P
0,15P 0,3Ph 0,2Ph 0,1Ph
A B C A B C
в) г)
P 0,3P 0,5Ph
D D
Рис. 11
M(x2) = - Px2 + 0,3Ph + 1,15P(x2 - 0,5h), x2 (0,5h, 2,5h],
Із цього виразу визначаємо значення згинальних моментів в перерізах В і С -
MВп = - 0,5Ph + 0,3Ph = - 0,2Ph,
MС = - 2,5Ph + 0,3Ph + 2,3Ph = 0,1Ph.
Відкладаючи на перпендикулярах до осі рігеля в точках А, В і С значення згинальних моментів і з'єднуючи прямими лініями кінці відповідних ординат, одержимо епюру М для рігеля.
У перерізах стояка ВD також виникають згинальні моменти відповідно до рівняння
M(y) = HDy ,
звідси
MD = 0, MВ = 0,3Ph.
У точці В сума моментів повинна дорівнювати нулю –
- 0,5Ph + 0,3Ph + 0,2Ph = 0.
Епюра згинальних моментів представлена на рис. 11 г.