

Pakhomov_A_N__Krivenkov_M_V_Elektricheskiy_privod_uchebnoe_posobie
.pdf181
метрический преобразователь, служащий для преобразования угловых или линейных механических перемещений в соответствующие изменения сопротивления, который влияет на измеряемое напряжение или ток. Действие индуктивного преобразователя основано на изменении индуктивного сопротивления электромагнитного дросселя при перемещении одной из его подвижных деталей, обычно якоря. Индуктивные преобразователи не имеют трущихся контактов, поэтому в сравнении с потенциометрическими они обладают большей надежностью и более высокой чувствительностью.
Тензометрические преобразователи (тензорезисторы) применяются для преобразований механических деформаций, давлений, моментов, усилий в электрический сигнал. В основе работы тензорезисторов лежит явление тензоэффекта, заключающееся в изменении сопротивления резисторов, выполненных из проводников или полупроводников, под действием силы, приложенной к ним.
Реализация некоторых систем управления электроприводов для организации технологического процесса может осуществляться с помощью соответствующих датчиков технологических переменных. К ним относятся датчики температуры, давления и расхода жидкости и газа, уровня жидкости, толщины полосового материала, влажности, массы и др.
На рис. 6.15 представлены схемы активных фильтров, предназначенных для избирательного подавления входных сигналов определенных частот f , и соответствующие им частотные характеристики.
С0 |
|
|
|
|
|
|
−Uвых |
R0 |
|
− U |
вых |
|
R0 |
|
|
|
|
|
|
|
|
||
R1 |
|
|
|
R1 |
С1 |
|
|
|
|
|
|
|
|
KфUвх |
|
Uвх |
|
KфUвх |
Uвх |
|
− Uвых |
||
− Uвых |
|
|
|||||
|
|
|
|
f |
|||
|
|
f |
|
|
|
||
|
|
|
|
|
|
1/T1 |
|
|
|
|
1/T0 |
|
|
|
|
|
а |
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
Рис. 6.15
Фильтры низкой (рис. 6.15, а) и высокой (рис. 6.15, б) частоты имеют следующие передаточные функции:
Wф нч(р) = −Κф |
|
|
1 |
и Wф вч(р) = −Κф |
Т1 p |
, |
Т |
0 |
р + 1 |
Т р + 1 |
|||
|
|
|
1 |
|
||
где Κф = R0 / R1 ; T0 = R0С0 ; T1 = R1С1 .
Существуют другие схемы фильтров низких и высоких частот, а также полосовые и заграждающие (режекторные) фильтры [4].

182
6.4. Средства сопряжения цифровых и аналоговых систем
При разработке устройств управления необходимо решать вопросы сопряжения этих устройств с объектом управления и датчиками обратной связи, а также с оператором, задающим управляющие воздействия с помощью специальных устройств ввода информации. Рассмотрим простейшие устройства ввода дискретной информации с переключателей, конечных выключателей и других контактных устройств, а также устройства ввода аналоговой информации и преобразования ее в цифровую форму и с устройствами цифрового вывода для сопряжения с электромеханическими исполнительными устройствами (реле, контакторами), полупроводниковыми усилителями, индикаторами и другими средствами отображения. Рассмотрим также принципы преобразования цифровых сигналов в аналоговые для управления исполнительными устройствами с аналоговыми входами.
Сопряжение цифровой системы с механическими ключами. Под механическим ключом будем понимать контакт нажимного кнопочного выключателя, реле, контактора, переключателя, конечного выключателя и т.д. На рис. 6.16, а показана простейшая схема, обеспечивающая преобразование состояния механического контакта (включено, выключено) в выходной логический сигнал. При нажатии кнопки SB1 вход логического элемента И-НЕ DD1 X1 = 0 , а сигнал на выходе Y = 1. Выходной дискретный сигнал Y вво-
дится в цифровую систему управления.
|
|
|
Uп |
|
|
Uп |
R2 |
R3 |
|
|
R1 |
SB2 |
DD2 |
|
SB1 |
DD1 |
|
& |
Y |
|
|
X1 |
& |
Y |
|
X2 |
|
|
|
|
|
|
|
|
|
& |
Y |
|
|
SB3 |
|
|
|
|
|
а |
|
б |
|
|
|
|
|
|
|
Рис. 6.16 |
|
Схема на рис. 6.16, а не имеет защиты от «дребезга» контактов (многократных замыканий и размыканий контактов при переключениях), длительность которого может достигать 50 мс в зависимости от типа переключателя. Хаотичное изменение сигнала на выходе в это время может быть воспринято как несколько выходных сигналов и может привести к сбою в работе устрой-

183
ства управления. Схема на рис. 6.16, б имеет электронные средства подавления дребезга.
Преобразование аналоговых сигналов в дискретные. Простейшим компаратором (устройством сравнения) является
операционный усилитель DA1 без обратной связи. |
|
|
|
DA1 |
|||
Uоп |
|
|
|
|
|
|
|
Предположим, что на инверсный вход ОУ подано |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
||
опорное напряжение Uоп, а на другой вход – сигнал |
U вх |
|
|
|
|
− |
Uвых |
|
|
|
|
||||
Uвх (рис. 6.17). Из-за большого коэффициента уси- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ления ОУ на его выходе установится либо положи- |
|
Рис. 6.17 |
|||||
тельное, либо отрицательное напряжение насыще- |
|
||||||
|
|
|
|
|
|
|
|
ния (примерно равное напряжению источника пита- |
|
|
|
|
|
|
|
ния ОУ) в зависимости от знака разности Uвх – Uоп, т. е. функцию порогового детектора.
Выход ОУ допускается соединять непосредственно с цифровыми устройствами без дополнительных преобразователей уровня, так как на выходе компаратора формируется либо сигнал «1», либо сигнал «0». Для устранения медленного изменения выходного сигнала между уровнями «1» и «0», а также дребезга при прохождении входным сигналом уровня опорного напряжения в качестве пороговых детекторов используются триггеры Шмитта – ОУ с положительной обратной связью. На рис. 6.18 приведена такая схема на базе компаратора DA1 и логического элемента DD1, где Uоп = 0.
Пусть входной сигнал Uвх < 0 и на |
|
|
|
|
|
|
|
|
|
DA1 |
|
|
|
|||||||
′ |
|
|
Uвх |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
DD1 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
выходе компаратора DA1 Uвых1 = 1. Рези- |
|
|
|
|
|
|
|
|
Uвых |
|
|
|||||||||
сторы R1, R2 образуют делитель, поэтому |
|
|
|
|
R1 |
|
|
|
|
|
|
|
|
& |
Uвых |
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
на неинверсном входе напряжение равно |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ucр1 = UвыхR1/(R1 + R2) . Следовательно, с |
|
|
|
|
|
|
|
|
|
|
|
R2 |
|
|
|
|
|
|||
ростом входного напряжения переключе- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
ние произойдет только при Uвх = Uср1 . Те- |
|
|
|
|
|
|
|
|
|
|
|
Рис. 6.18 |
|
|
|
|||||
′ |
и обратное |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
перь выходной сигнал Uвых2 = 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
переключение возможно при |
снижении |
входного |
|
напряжения |
до |
уровня |
||||||||||||||
′ |
+ R2) |
. Таким образом, схема имеет гистерезис (два порога |
Ucр2 = Uвых2 R1/(R1 |
срабатывания Uср1 и Uср2 ) и вероятность многократного переключения выхо-
да за счет шума меньше.
Сопряжение цифровой системы с электромагнитными реле и кон-
такторами. Катушка реле K1 с напряжением 5 В может быть непосредственно включено на выход логического элемента DD1 с открытым коллектором (рис. 6.19, а). Здесь диод VD1 обеспечивает защиту микросхемы от перенапряжения при отключении реле.

|
|
|
184 |
|
|
|
|
|
K1 |
|
K1 |
|
Uп1 |
Uп2 |
|
Uп |
|
|
|
|
|
|
|
|
DD1 |
|
DD1 |
R1 |
|
& |
|
& |
|
|
|
|
VD1 |
||
|
|
|
|
|
|
|
|
|
VT1 |
VD1 |
R2 |
|
VD2 |
а |
б |
|
Рис. 6.19 |
Uп1
DD1
&
 Uп2
Uп2
R1  R2
R2
VT1 |
Выход |
|||
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
в
Для управления реле с большим напряжением можно использовать схему (рис. 6.19, б), где коммутация силовой цепи осуществляется дополнительным транзистором VT1, включенным на выход логического элемента. Диод VD2 обеспечивает необходимое напряжение смещения для запирания VT1. Для управления контакторами используют многокаскадные транзисторные ключи, либо применяют дополнительное реле возбуждения, контакты которого коммутируют цепь катушки силового реле (контактора).
В последние годы в электроприводе все шире используются интерфейсы с ключевыми транзисторными каскадами в качестве бесконтактных силовых коммутирующих устройств (рис. 6.19, в).
Управление индикацией. Схемы индикации на лампах накаливания и
|
|
|
|
Uп |
|
|
|
|
|
Uп |
светоизлучающих диодах показаны |
||||||||||||
|
|
|
|
|
|
|
|
|
на рис. 6.20. |
Вторая схема |
может |
||||||||||||
|
|
DD1 |
|
|
|
|
|
HL1 |
|
|
|
|
|
|
|
|
VD1 |
использоваться также |
в |
качестве |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
устройства гальванической развязки |
||||||
|
|
& |
|
|
|
|
|
DD1 |
|
|
|
|
|
R1 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
между цифровой системой управле- |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
& |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
R1 |
|
|
|
|
|
|
|
|
|
|
ния и силовым преобразователем. В |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
качестве коммутирующих |
уст- |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
а |
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
ройств могут использоваться оп- |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
Рис. 6.20 |
|
|
|
|
|
|
тронные тиристоры, т. е. тиристоры, |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
управляемые |
световым |
потоком. |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Светоизлучающий диод, включаю- |
||||
щий тиристор, |
|
подключается к источнику питания |
системы |
управления |
|||||||||||||||||||
(рис 6.20, б). При этом электрическая связь между управляющей и силовой частями отсутствует, что существенно повышает надежность системы управления из-за резкого снижения уровня помех.
Цифро-аналоговые и аналого-цифровые преобразователи. В том случае, когда электропривод управляется МПС (ЭВМ) необходимо использовать цифро-аналоговые преобразователи (ЦАП), преобразующие выходное управляющее воздействие в виде цифрового кода в аналоговый сигнал. Для ввода в МПС аналоговых сигналов с датчиков необходимо обратное аналого-
185
цифровое преобразование, осуществляемое с помощью аналого-цифровых
преобразователей (АЦП). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Задача ЦАП |
заключается |
в |
|
|
|
Dn |
|
R |
|
|
|
|
|
|
|
R0 |
|
|
|
|
|
преобразовании величины, заданной, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Tn |
|
|
||||||||||||||||||
как правило, двоичным кодом, в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
пропорциональный |
уровень напря- |
|
|
|
|
|
2R |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
Dn-1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
жения (тока). На рис. 6.21 приведена |
|
Tn-1 |
|
|
|
|
|
|
|
|
|
|
Uвых |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|||||||||||||||
простейшая схема ЦАП на ОУ, кото- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
рый работает в режиме аналогового |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
... |
|
|
|
|
|
|
|
|
|
|||||
... |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
суммирующего усилителя. На схеме |
|
|
|
2 |
n-1 |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
D1 |
|
R |
|
|
|
|
|
|
|
|
|
|||||||
триггеры от 1 до n образуют регистр |
|
T1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
с двоичными числами D1-Dn, пред- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
назначенными для перевода их в |
|
|
|
|
|
|
Рис. 6.21 |
||||||||||||||
|
|
|
|
|
|
||||||||||||||||
пропорциональное |
напряжение |
на |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
выходе ЦАП. Таким образом, напряжение на выходе ЦАП определяется выражением:
Uвых = − |
R |
n |
UQi |
|
|
|
0 |
∑ |
2 |
n−i |
|
|
|
|
R i=1 |
|
|
|
||
где выходы триггеров UQi имеют логические уровни «0» или «1» в соответст- |
||||||
вии с двоичным кодом, подлежащим преобразованию. |
|
|||||
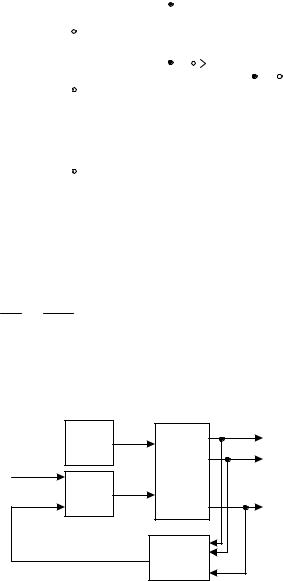
Схемы АЦП могут быть двух |
|
|
|
|
|
D1 |
типов: схемы, содержащие ЦАП и |
|
|
|
|
ГИ |
|
схемы без ЦАП. Рассмотрим функ- |
Uвх |
|
|
СЧ |
D2 |
|
|
|
... ... |
||||
циональную схему АЦП следящего |
UЦАП |
|
K |
|||
|
|
|||||
типа (рис. 6.22). В ней применен |
|
Dn |
||||
|
|
|
|
|
||
реверсивный счетчик СЧ, управ- |
|
|
|
|
|
|
ляемый сигналом с выхода компа- |
|
|
|
|
ЦАП |
... |
ратора K. При Uвх > UЦАП счетчик |
|
|
|
|
||
|
|
|
|
|
||
|
|
|
|
|
|
|
устанавливается в режим прямого |
|
|
|
|
|
|
счета. Импульсы генератора ГИ, |
|
|
|
|
Рис. 6.22 |
|
поступающие на вход счетчика, |
|
|
|
|
|
|
увеличивают в нем число. В результате растет напряжение UЦАП до тех пор, |
||||||
пока достигнет уровня Uвх. При Uвх < UЦАП счетчик переводится в режим об- |
||||||
ратного счета. Число в счетчике убывает и уменьшается напряжение UЦАП до |
||||||
значения Uвх. С выхода счетчика в момент равенства UЦАП и Uвх снимается |
||||||
двоичное число D1-Dn, определяющее аналоговое входное напряжение Uвх. |
||||||

186
6.5. Защита, блокировка и сигнализация в электроприводах
Для обеспечения надежной и безопасной работы электропривода и технологического оборудования в его схемах предусматриваются необходимые виды защит. Этой же цели служат различные блокировки, обеспечивающие заданный порядок операций по управлению и предотвращающие при этом ошибочные действия оператора. Кроме того, во многих случаях целесообразно осуществлять контроль за состоянием и режимом работы отдельных узлов электропривода, что обеспечивается с помощью средств сигнализации, измерительных и регистрирующих приборов [12].
Максимальная токовая защита. При работе электропривода может произойти увеличение тока в силовых цепях сверх допустимого предела, вызванное, например, стопорением движения исполнительного органа рабочей машины, обрывом одной из фаз питающего напряжения, резким снижением тока возбуждения двигателей постоянного тока, замыканием электрических цепей между собой или на землю (корпус). Для защиты электропривода и питающей сети от появляющихся в этих случаях недопустимо больших токов предусматривается максимальная токовая защита, которая может реализовываться различными средствами: с помощью плавких предохранителей, реле максимального тока и автоматических выключателей.
Плавкие предохранители FU включаются в каждую линию (фазу) питающей двигатель сети между выключателем напряжения сети и контактами линейного контактора KM для АД (рис. 6.23, а) и ДПТ (рис. 6.23, б). Цепи управления также могут защищаться плавкими предохранителями (6.24, в).
|
|
+ |
− |
QF |
I> |
Q |
Q |
|
FU |
FU |
FU |
|
KM |
KM |
KM |
|
M |
|
M |
|
а |
|
б |
|
|
Рис. 6.23 |
|
Реле максимального тока используются в основном в электроприводах средней и большой мощности. Катушки этих реле FA1 и FA2 включаются в две фазы трехфазных двигателей переменного тока (рис. 6.24, а) и в один или два полюса ДПТ (рис. 6.24, б) между выключателем и контактами линейного контактора KM. Размыкающие контакты этих реле включены в цепь катушки

187
KM линейного контактора (рис. 6.23, в). При возникновении сверхтоков в контролируемых цепях, превышающих уставки реле FA1 и FA2, эти контакты размыкаются и силовые контакты линейного контактора KM отключают двигатель от питающей сети.
|
+ |
− |
Q |
|
Q |
Q |
|
|
|
FА1 |
FА2 |
FА1 |
FА2 |
+ |
SB2 KM |
− |
|
KM |
KM |
KM |
SB1 |
FА FP |
|
|
|
|
||||
|
|
|
|
|||
|
|
|
|
|
KM |
|
M |
M |
|
в |
а |
б |
|
Рис. 6.24 |
Автоматические воздушные выключатели (автоматы) являются комплексными многоцелевыми аппаратами и обеспечивают ручное включение и отключение двигателей и защиту от сверхтоков, перегрузок и снижения питающего напряжения. Пример схемы включения автомата QF для подключения и защиты трехфазного АД приведен на схеме рис. 6.23, а. Автоматические выключатели широко используются также для коммутации и защиты силовых и маломощных цепей других видов электропривода.
Нулевая защита. При значительном снижении напряжения сети или его исчезновении эта защита обеспечивает отключение двигателей и предотвращает самопроизвольное их включение (самозапуск) после восстановления напряжения.
В тех случаях, когда двигатели управляются от кнопок контакторами или магнитными пускателями, нулевая защита осуществляется без применения дополнительных средств. Например, если в схемах рис. 6.24 исчезло или сильно понизилось напряжение сети, катушка линейного контактора KM потеряет питание и он отключит двигатель от сети. При восстановлении напряжения включение двигателя может быть произведено только после нажатия на кнопку управления SВ2.
При управлении электроприводом от командоконтроллера или ключа с фиксированным положением их рукояток нулевая защита осуществляется с помошью дополнительного реле напряжения FV (рис. 6.25). В этой схеме реле FV включается в нулевом положении командоконтроллера (ключа) через контакт SМ0, после чего оно становится на самопитание через свой собственный контакт FV. Переведя рукоятку командоконтроллера (ключа) в положение 1, через контакт SM1 включится линейный контактор KM1 для пуска двигателя. При исчезновении напряжения реле FV отключится, своим размыкающим

|
|
|
|
188 |
+ |
|
FV |
− |
контактом FV разорвет цепь питания KM, который от- |
|
ключит двигатель от сети. При восстановлении на- |
|||
FV |
FP |
|
||
201 |
|
|
пряжения питания повторное включение двигателя |
|
SM0 |
|
может быть произведено лишь после установки руко- |
||
|
|
|
||
|
|
SM1 KM |
|
ятки вновь в нулевое (среднее) положение, что ис- |
|
|
|
|
ключает возможность самозапуска двигателя. |
|
|
|
|
Тепловая защита. Эта защита отключает двига- |
|
Рис. 6.25 |
|
тель от источника питания, если вследствие протека- |
|
|
|
ния по его цепям повышенных токов имеет место бо- |
||
|
|
|
|
|
|
|
|
|
лее высокий нагрев его обмоток. Увеличение тока |
возникает, в частности, при перегрузках двигателей или обрыве одной из фаз |
||||
трехфазных АД или СД. |
||||
|
Тепловая зашита двигателей может быть осуществлена с помощью теп- |
|||
ловых реле. Тепловые реле FP включаются в две фазы трехфазных двигате- |
||||
лей переменного тока непосредственно или через трансформаторы тока ТА |
||||
(рис. 6.26, а), если ток двигателя превышает номинальный ток реле. Для за- |
||||
щиты |
ДПТ реле |
включаются в один или два полюса цепи их питания |
||
(рис. 6.26, б). Размыкающие контакты тепловых реле включаются или в цепи |
||||
катушек главных (линейных) контакторов (рис. 6.24, в), или в цепь защитного |
||||
реле (см. рис. 6.25). Принцип работы многих тепловых реле основан на от- |
||||
ключении их контактов с помощью действия изгибающейся из-за нагрева би- |
||||
металлической пластины. |
||||
|
|
|
+ |
− |
|
KM |
|
KM |
KM |
TA1 |
TA2 |
|
||
|
|
|
||
FP1 |
|
FP2 |
FP1 |
FP2 |
|
|
|
||
M |
|
|
M |
|
а |
|
|
б |
|
|
|
Рис. 6.26 |
|
|
Тепловая защита двигателей может осуществляться автоматическими выключателями и магнитными пускателями, если они имеют встроенные тепловые расцепители.
Минимально-токовая защита. Этот вид защиты применяется в электроприводах с ДПТ и СД для защиты от обрыва их цепей возбуждения. Исчезновение тока возбуждения опасно тем, что оно вызывает исчезновение

189
противоЭДС двигателей и приводит к значительному возрастанию тока в их силовых цепях.
Эта защита осуществляется с помощью минимально-токового реле KF, катушка которого включается в цепь обмотки возбуждения двигателя (рис. 6.27, а). Замыкающий контакт реле KF включается в цепь катушки контактора KM, что позволяет включать двигатель только при наличии тока возбуждения в обмотке возбуждения LM. В случае исчезновения или резкого снижения тока возбуждения контакт реле KF разомкнется и контактор KM, потеряв питание, отключит двигатель от сети.
+ |
SB2 |
KM |
SB1 |
KM
LM
VD Rр
а
−+
KF SB1
KF
KF
SB2 |
KM |
− |
|
KVF |
|||
|
|
||
KM |
|
KT |
|
|
|
||
KT |
|
KVF |
|
|
|
б
Рис. 6.27
Специальные виды защиты. К ним относится защита от перенапряжения на обмотке возбуждения ДПТ, затянувшегося пуска СД и ряд других.
Защита от перенапряжения на обмотке возбуждения ДПТ требуется при ее отключении от источника питания. В этом режиме вследствие быстрого спадания тока возбуждения и соответственно магнитного потока в обмотке возникает значительная (до нескольких киловольт) ЭДС самоиндукции, которая может вызвать пробой ее изоляции. Защита осуществляется с помощью так называемого разрядного резистора Rр , включаемого параллельно обмотке
возбуждения LM (рис. 6.27, а), который способствует снижению темпа спадания тока в обмотке возбуждения и ограничению ЭДС самоиндукции до допустимых пределов. Его сопротивление выбирается в 4-5 раз больше активного сопротивления обмотке возбуждения LM. Для устранения потерь энергии в разрядном резисторе последовательно с ним включается диод VD. Он не пропускает через резистор ток при включенной обмотке возбуждения, но позволяет протекать току под действием ЭДС самоиндукции, возникающей при отключении обмотки.
Защита от затянувшегося пуска СД обеспечивает его прекращение, если к концу расчетного времени пуска ток возбуждения не достиг заданного уровня. Осуществляется эта защита с помощью реле минимального тока KF, включаемого в цепь обмотки возбуждения СД и реле времени KT. Если за время выдержки реле KT, равное времени нормального пуска синхронного двигателя, ток возбуждения окажется недостаточным, то после срабатывания

190
реле KT (рис. 6.27, б) сработает реле защиты KVF и даст команду на прекращение пуска.
Путевая защита обеспечивает отключение электропривода при достижении исполнительным органом рабочей машины крайних положений. Она осуществляется с помощью конечных выключателей, устанавливаемых в этих положениях исполнительного органа и размыкающих цепи реле защиты или непосредственно линейных контакторов (рис. 6.28, а).
Электрические блокировки в схемах электропривода. Блокировки служат для обеспечения заданной последовательности операций, предотвращения нештатных и аварийных ситуаций и неправильных действий со стороны оператора, что в итоге повышает надежность работы электропривода и технологического оборудования. Так, например, при работе двух контакторов KM1 и KM2 (рис. 6.28, а) перекрестное включение их размыкающих контактов в цепи катушек этих аппаратов не допускает включение одного контактора при включенном другом. Такой вид блокировки применяется в реверсивных электроприводах, где недопустимо одновременное включение двух контакторов, или для организации электрического торможения только после отключения двигателя от сети.
+ |
KM1 |
− |
+ |
− |
SB1 |
SB2 KM1 |
|
Q |
HL1 R1 |
|
KM2 |
|
KM1 |
HL2 R2 |
|
|
|
||
|
KM2 |
|
KM2 |
HL3 R3 |
KM2 |
KM1 SQ |
SQ |
HL4 R4 |
|
|
|
|||
|
|
|
|
|
|
а |
|
|
б |
|
|
Рис. 6.28 |
|
|
Одновременное включение двух контакторов может быть предотвращено с помощью использования двухцепных кнопок управления (рис. 6.28, а). Нажатие любой из кнопок приводит к замыканию цепи катушки одного из контакторов и одновременному размыканию цепи другого контактора.
Сигнализация в схемах управления электроприводов. Для контроля хода технологического процесса или последовательности выполняемых операций, состояния защиты и наличия напряжения питания или какого-либо электрического сигнала применяется сигнализация. Она может быть световой и осуществляться с помощью сигнальных лампы и табло, звуковой (звонок, сирена) и визуальной (указательные реле, измерительные приборы).
Для примера на рис. 6.28, б показаны возможные сигнализации в схеме управления электропривода. Лампа HL1 сигнализирует о включении ключа Q для питания схемы управления, лампы HL2 и HL3 – о включении контакторов KM1 и KM2, лампа HL4 – о срабатывании конечного выключателя SQ.