

Pakhomov_A_N__Krivenkov_M_V_Elektricheskiy_privod_uchebnoe_posobie
.pdf51
ственные скоростную и механическую характеристики. Следует заметить, что вследствие реакции якоря скоростная и механическая характеристики некоторых двигателей параллельного возбуждения несколько отличаются от прямолинейных.
У двигателя последовательного возбуждения при увеличении нагрузки возрастает падение напряжения в сопротивлении якоря и, кроме того, увеличивается магнитный поток, что как видно из выражения (3.5), приводит к дополнительному снижению скорости. Поэтому скоростная и механическая характеристики двигателя последовательного возбуждения (характеристики 2 на рис. 3.3, а и б) получаются более мягкими, чем у двигателя параллельного возбуждения. По мере насыщения магнитной цепи степень жесткости характеристик возрастает. Существенной особенностью двигателя последовательного возбуждения является то, что он не может работать вхолостую. Действительно, если M = M c → 0 , то Iя → 0 и Ф → 0 . Как видно из выражений (3.5)
и (3.6), при этом ωe → ∞ .
Применение двигателя последовательного возбуждения с мягкой механической характеристикой является в некоторых случаях весьма желательным. Так, на кранах это позволяет, не применяя регулирующих устройств, перемещать легкие грузы с повышенными скоростями, что целесообразно с точки зрения увеличения производительности.
Двигатель смешанного возбуждения при работе вхолостую имеет магнитный поток Ф0 (рис. 3.2, а), которому соответствует скорость холостого
хода
ω03 = UФн .
сE 0
Обычно намагничивающая сила параллельной обмотки выбирается так, чтобы получить ω03 , равную 1, 5ωн .
При увеличении нагрузки двигателя смешанного возбуждения его скорость уменьшается вследствие увеличения падения напряжения в сопротивлении якоря и возрастания магнитного потока. Скоростная и механические характеристики двигателя получаются менее жесткими, чем у двигателя параллельного возбуждения, у которого Ф = const , но более жесткими, чем у двигателя последовательного возбуждения, у которого магнитный поток изменяется в более широких пределах.
При изменении нагрузки двигателей постоянного тока происходит следующее. Предположим, например, что двигатель последовательного возбуждения развивал момент M1 = M c1 и скорость ω1 (рис. 3.3, б); моменту M1 со-
ответствовал ток Iя1 (рис. 3.3, а). Допустим, что момент статического сопротивления стал равен M с2 > M c1 . В первое мгновение после увеличения мо-
52
мента сопротивления из-за инерционности двигателя скорость не изменится и будет равна ω1 . Вследствие этого не изменятся ЭДС E1 , ток Iя1 и момент M1
двигателя. Поскольку M с2 > M1 , начнется переходный процесс, при котором
скорость и ЭДС будут уменьшаться, а ток якоря и момент двигателя возрастать. Установившийся режим наступит при скорости ω2 , при которой
M 2 = M c2 и Iя = Iя2 (рис. 3.3, а и б).
Построение естественных характеристик двигателя параллельного возбуждения может быть произведено по уравнениям (3.5) и (3.6). Величину cE Фн = kE = const определяют обычно из выражения (3.5), подставив в него
ωе = ωн и Iя = Iн .
Так как магнитный поток двигателей последовательного и смешанного возбуждения при изменении нагрузки не остается постоянным, воспользоваться уравнениями (3.5) и (3.6) для построения естественных характеристик не представляется возможным. Использовать указанные уравнения для построения естественных характеристик было бы возможно при наличии магнитной характеристики и некоторых конструктивных параметров двигателя.
Расчет естественных характеристик ДПТ последовательного и смешанного возбуждения производится графоаналитическим методом на основании
каталожных универсальных зависимостей момента на валу M в (I ) и частоты вращения вала n (I ) от тока якоря в относительных единицах. Базовыми величинами приняты номинальные значения тока якоря Iн , частоты вращения nн и момента на валу Мв н = Pн / ωн .
На рис. 3.4 приведены естественные универсальные характеристики ДПТ последовательного возбуждения. Построение естественной электромеханической характеристики ωе (I ) осуществляется простым пересчетом зави-
симости n (I ) в абсолютные единицы и переходом к угловой скорости ω . Для расчета естественной механической характеристики ω(M ) следует построить зависимость электромагнитного момента от тока якоря M (I ) . Для этого задаются несколькими значениями токов якоря Ii (не менее пяти то-
чек), для каждого из которых по естественной электромеханической характеристике ωе (I ) определяют частоту вращения ωi и рассчитывают значение
электромагнитного момента M i [7]:
Mi (Ii ) = cE Фi (Ii ) × Ii |
= |
Uн − Ii Rяце |
× Ii , |
|
|||
|
|
wi |
|
где Rяце = Rяд + Rщ + Rдп + Rко + Rов пос – сопротивление якорной цепи двигателя, включающее сопротивление обмотки возбуждения.

|
|
|
|
|
|
|
53 |
|
|
|
|
|
|
|
|
2.6 |
M в, n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2,4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2.2 |
|
|
|
|
|
|
|
|
|
|
M в (I ) |
|
|
|
|
2,0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1,6. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1,2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
10 кВт и более |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
до 10 кВт |
|
||||
0,4. |
|
|
|
|
|
сплайноваяn кубическая(I ) |
|
|
|
|
|
||||
|
|
|
|
|
|
интерполяция |
|
|
|
|
|
|
|
||
0.2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0.2 |
. |
0.6 |
|
. |
1 |
. |
|
1.4 |
. |
1.8 |
2,0 |
2.2 |
. |
2.6 |
0 |
|
0,4 |
|
|
0,8 |
|
1,2 |
|
|
1,6 |
|
|
2,4 |
|
|
|
|
|
|
|
|
|
Рис. 3.4 |
|
|
|
|
|
|
||
Имея скоростные wе ( Iя ) и моментные M ( Iя ) характеристики, нетруд- |
|||||||||||||||
но построить естественные механические характеристики wе (M ). |
|
||||||||||||||
Если сведения о сопротивлении якоря отсутствуют, то его можно опре- |
|||||||||||||||
делить приближенно из формулы (3.7), полученной на основании следующих |
|||||||||||||||
соображений: при номинальной нагрузке двигателя потери мощности в со- |
|||||||||||||||
противлении якоря составляют некоторую часть общих потерь мощности в |
|||||||||||||||
двигателе, т. е. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Pн - Pн |
|
|
|
|
|
|
|
|
|
|
|
|
Iн2 Rяце = gп |
×103 , |
|
|
|
|
(3.7) |
|||||
|
|
|
|
|
|
hн |
|
|
|
|
|
|
|
|
|
где γп – коэффициент, |
показывающий, какую часть от общих потерь мощно- |
||||||||||||||
сти составляют потери в сопротивлении Rяцe (обычно для ДПТ параллельного |
|||||||||||||||
возбуждения |
γп = 0,5 , |
смешанного |
и |
последовательного |
возбуждения |
||||||||||
( Rяцe = Rяц + Rовпос ) |
γп = 0,6 и |
γп = 0,75 |
соответственно); Pн |
– |
номинальная |
||||||||||
мощность на валу двигателя ( Pн = UнIн / ηн ), |
кВт; |
ηн – |
КПД двигателя при |
||||||||||||
номинальной нагрузке. |
|
|
|
|
|
|
|
|
|
|
|
|
|||
54
3.3. Влияние параметров на характеристики ДПТ
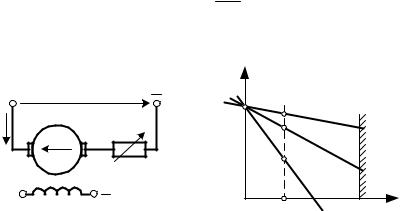
Исходя из уравнений электромеханической и механической характеристик (3.5) и (3.6), скорость ДПТ зависит от величины напряжения на зажимах якоря U , сопротивления якорной цепи Rяц и значения магнитного потока Ф .
При введении добавочного активного сопротивления Rдоб в якорную
цепь ДПТ (рис. 3.5, а) скорость идеального холостого хода при номинальных значениях напряжения Uн и магнитного потока Фн не изменится:
ω0 = |
U н |
= const , |
|
сE Фн |
|||
|
|
а наклон характеристик будет увеличиваться пропорционально суммарному активному сопротивлению якорной цепи Rяц = Rяце + Rдоб (рис. 3.5, б):
ω = |
I × Rяц |
= |
M × Rяц |
. |
(3.8) |
||
c Ф |
|
||||||
|
|
c c |
M |
Ф2 |
|
||
|
E н |
|
E |
н |
|
||
Следовательно, жесткость реостатных механических характеристик с увеличением Rдоб снижается (β ≡ 1/ Rяц ). Для регулировки скорости метод
введения добавочного активного сопротивления Rдоб используется редко, по-
скольку имеет плохие показатели регулирования – небольшой диапазон ввиду снижения β , низкий КПД из-за потерь энергии в сопротивлениях (см. разд. 8.3). Однако он используется для пуска ДПТ, поскольку позволяет ограничить пусковой ток (см. разд. 3.4):
|
|
|
|
Iп = Uн . |
|
|
|
|
|
|
Rяц |
|
|
|
|
|
|
ω |
|
|
|
+ |
U |
|
ω0 |
ест. |
|
I |
|
|
Rд |
|
|
|
M |
E Rя |
|
Rд1 |
|
||
|
|
Rд1< Rд2 |
||||
|
|
|
||||
|
|
|
|
|
|
|
|
+ |
LM |
|
|
Rд2 M (I) |
|
|
|
|
Mн(Iн) |
|
|
|
|
|
|
|
|
|
|
|
|
а |
|
|
б |
|
Рис. 3.5
|
|
|
|
|
|
55 |
|
|
|
|
Выражение (3.8) позволяет легко решать прямую задачу – строить ис- |
||||||||||
кусственные характеристики при заданном Rдоб , и обратную – |
определять ве- |
|||||||||
личину Rдоб для требуемой искусственной характеристики. |
|
|
||||||||
В электроприводе с двигателем последовательного возбуждения при |
||||||||||
U = Uн (рис. 3.6, а) и известной естественной электромеханической характе- |
||||||||||
ристике можно получить соотношение для построения искусственных харак- |
||||||||||
теристик при реостатном регулировании скорости [9]: |
|
|
||||||||
|
|
|
ω = ω |
Uн − I (Rяце + Rдоб ) . |
|
|
(3.9) |
|||
|
|
|
и |
е |
Uн − IRяце |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Механические |
характеристики |
при |
реостатном |
|
регулировании |
|||||
(рис. 3.6, б) рассчитываются по известной в каталоге зависимости M (I ) . |
||||||||||
|
|
|
|
|
|
|
ω |
|
|
|
|
+ |
|
U |
|
|
|
|
ест. |
|
|
I |
|
|
|
|
|
|
|
|
|
|
M |
E |
Rя |
Rв |
Rд |
|
|
Rд1 |
Rд1<Rд2 |
||
|
|
|
||||||||
|
|
|
|
LM |
|
|
|
Rд2 |
M |
(I) |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Mн(Iн) |
|
|
|
|
|
а |
|
|
|
б |
|
|
|
|
|
|
|
|
|
Рис. 3.6 |
|
|
|
|
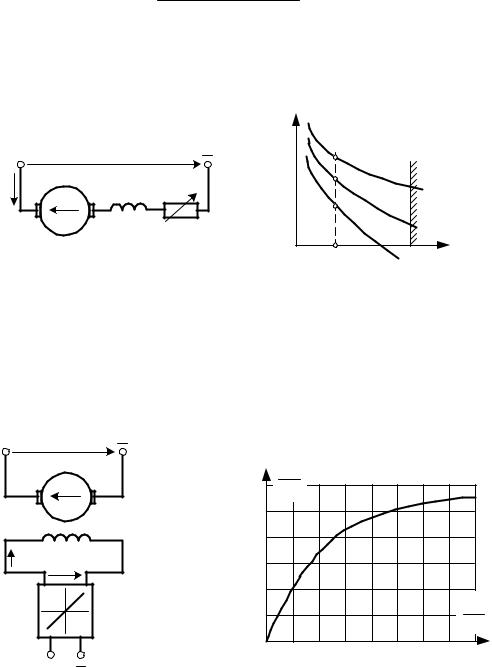
Для изменения магнитного потока якорную цепь двигателя без каких- |
||||||||||
либо добавочных резисторов подключим к источнику с номинальным напря- |
||||||||||
жением Uн , а цепь возбуждения – к возбудителю В (рис. 3.7) или к тому же |
||||||||||
источнику через добавочный резистор (рис. 3.1). |
|
|
||||||||
+ |
Uн |
|
M |
Rя |
|
I |
E |
|
LM |
|
Rв |
Iв |
Uв |
|
|
Uв |
|
В |
Uз |
|
|
|
|
|
+ Uз |
|
Рис. 3.7 |
|
|
|
Ф |
|
|
|
|
Фн |
|
|
|
1,0 |
|
|
|
|
0,6 |
|
|
|
|
0,2 |
|
|
|
Iв |
|
|
|
Iвн |
|
|
|
|
|
|
0 |
0,2 |
0,6 |
1,0 |
1,4 |
|
|
Рис. 3.8 |
|
|

56
Нормальные электрические машины рассчитаны таким образом, что номинальному току возбуждения соответствует магнитный поток на колене кривой намагничивания. Типичная усредненная кривая намагничивания для ряда машин показана на рис. 3.8. Так как Iвн соответствует допустимому на-
греву обмоток возбуждения, то при регулировании скорости в условиях продолжительной работы ток возбуждения можно только уменьшать.
Семейство искусственных характеристик ДПТ можно получить, рассмотрев изменение координат точек холостого хода и короткого замыкания при изменении магнитного потока Ф.
Скорость идеального холостого хода ω0 = U н / сEФ растет с уменьше-
нием потока. Так как ток короткого замыкания не зависит от степени ослабления поля, все электромеханические характеристики пересекаются в одной точке Iкз = Uн / Rяце (рис. 3.9, а). При этом следует помнить, что ток короткого замыкания для нормальных машин может во много раз превосходить допустимый (нерабочие участки изображены пунктирными линиями). Момент короткого замыкания M кз = сM IкзФ при Iкз = const уменьшается с уменьшени-
ем потока. В результате механические характеристики имеют вид прямых, показанных на рис. 3.9, б.
Данный способ регулирования применяется в электроприводе металлорежущих станков, наматывающих устройств, прокатных станов и др.
ω |
ω |
ω02  ω01
ω01 
ω0е |
е |
|
с |
|
т. |
|
ω |
|
|
|
ω02 |
|
|
|
01 |
|
|
х- |
ω0е |
е |
с |
|
|||
ка |
|
|
т. |
I |
|
|
M |
I |
|
Mн |
Mкз2 Mкз1 Mкзе |
кз |
|
|
|
а |
|
|
б |
Рис. 3.9
Схема подключения ДПТ, обеспечивающая изменение напряжения на якоре, показана на рис. 3.10, а. Этот способ регулирования предполагает использование силового управляемого преобразователя (УП), который может быть выполнен на основе либо регулируемого электромашинного агрегата (см. разд. 5.2), либо управляемого выпрямителя (см. разд. 5.3). При снижении по условиям перегрева обмоток питающего якорь ДПТ напряжения (в данном случае ЭДС преобразователя Eп ) согласно (3.5) и (3.6) пропорционально
уменьшается только ω0 , а ω не зависит от U (β = const ). Таким образом, семейство искусственных характеристик при cEФн = const – это параллельные прямые (рис. 3.10, б) с наклоном несколько большим, чем у естественной

|
|
|
|
57 |
|
|
характеристики ДПТ, поскольку суммарное сопротивление якорной цепи |
||||||
включает активное сопротивление преобразователя Rяц = Rяце + Rп . |
||||||
|
|
|
I |
ω |
ω |
|
|
|
|
|
0 |
Uвх1 >Uвх2 |
|
|
|
|
|
|
|
|
+ |
|
Eп |
|
|
ω0= 0 |
Uвх2 M |
Uвх |
УП |
M |
LM |
|||
|
|
|
|
+ |
|
Uвх= 0 |
|
|
|
|
|
Uвх2 |
|
|
|
|
|
ω0 |
ест. дв. |
|
|
|
|
|
|
Uвх1 |
|
|
|
а |
|
|
б |
|
|
|
|
|
Рис. 3.10 |
|
|
Свойства УП оказывают влияние на вид характеристик. Так, на рис. 3.10, б предполагается, что УП имеет двустороннюю проводимость. При использовании преобразователей с односторонней проводимостью ( I > 0 ) характеристики располагаются лишь в I и IV квадрантах.
Таким образом, изменение U обеспечивает хорошие показатели регулирования скорости ДПТ, а также позволяет осуществить плавный пуск двигателя с ограничением пускового момента и тока якоря.
3.4. Пуск двигателя постоянного тока
При пуске ДПТ прямое включение якоря в сеть, как правило, недопустимо, так как пусковой ток якоря ограничивается лишь весьма небольшим сопротивлением якорной цепи Rяце . Пусковым током (моментом) называется
ток (момент), возникающий в первое мгновение после подключения двигателя к сети, когда ω = 0 . Как следует из формулы (2.4) при ω = 0 , E = cE Фω = 0
и Rдоб∑ = 0 пусковой ток двигателя, включенного по схеме, изображенной на рис. 3.1, равен:
Iяп = Iкз = U .
Rяце
Как видно, пусковой ток может достигать значительных величин. Так, для двигателей параллельного возбуждения мощностью от 5 до 100 кВт пусковой ток может превышать в 10-30 раз номинальный ток двигателей Iн . В
действительности из-за индуктивности обмотки якоря пусковой ток будет несколько меньше указанных значений. Однако и такой ток недопустим по условиям коммутации – Iяп ≤ (2,0 ÷ 2,5) Iн . Кроме того, при таком значении тока
58
возникает недопустимо большой момент, который может привести, например, к чрезмерно большим ускорениям и поломке механизмов. Большой пусковой ток может вызывать значительное снижение напряжения в питающей сети, что ухудшит условия работы других потребителей.
Для ограничения пускового тока и момента при питании двигателя от сети с постоянным напряжением в цепь якоря включают добавочное сопротивление, называемое пусковым сопротивлением или пусковым реостатом. При наличии добавочного сопротивления Rдоб в цепи якоря будем иметь:
Iя = |
U |
(3.10) |
|
|
. |
||
|
|||
|
Rяце + Rдоб |
|
|
Рассчитав соответствующим образом пусковое сопротивление Rдоб ,
можно ограничить пусковой ток и момент до требуемой величины.
В процессе пуска двигателя ЭДС якоря возрастает, что приводит к уменьшению тока якоря и момента. Это дает возможность по мере разгона двигателя пусковое сопротивление постепенно выключать. Наиболее распространенная схема включения пускового сопротивления показана на том же рис. 3.1. Обычно пусковое сопротивление состоит из нескольких ступеней m, которые при пуске поочередно выключаются с помощью ключей K1-Km. Каждому сопротивлению в цепи якоря соответствуют свои искусственные скоростные и механические характеристики двигателей, уравнения которых нетрудно получить из формул (3.5) и (3.6), заменив в них Rяце на Rяце
После указанной замены получим
ωи i |
= |
Uн − Iя (Rяце + Rдобi ) |
= |
Uн |
− |
IяRяц∑ i |
; |
(3.11) |
||||||
|
|
cEФ |
|
|||||||||||
|
|
cE Ф |
|
|
|
|
cE Ф |
|
||||||
|
|
ω |
= |
Uн |
− |
MRяц∑ i |
. |
|
|
|
(3.12) |
|||
|
|
|
|
|
|
|
||||||||
|
|
и i |
|
сE Ф |
|
сE сM Ф |
2 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
||||
Характер изменения магнитного потока при изменении нагрузки Ф(Iя )
не зависит от величины сопротивления цепи якоря, вследствие чего искусственные характеристики двигателей имеют те же особенности, что и естественные характеристики. Исключением является лишь то, что большим добавочным сопротивлениям в цепи якоря соответствуют при том же токе Iя или
моменте M меньшие скорости и, следовательно, более мягкие искусственные характеристики. Все искусственные характеристики двигателя параллельного возбуждения (рис. 3.11, а), а также смешанного возбуждения проходят через

59
одни и те же точки холостого хода. У двигателя последовательного возбуждения, независимо от величины добавочного сопротивления цепи якоря, при
M = M c → 0 , Iя → 0 , Ф → 0 , ω → ∞ (рис. 3.11, б).
При известных сопротивлениях пускового реостата построение искусственных скоростных и механических характеристик двигателя параллельного возбуждения нетрудно произвести по уравнениям (3.11) и (3.12). Воспользоваться непосредственно уравнениями (3.11) и (3.12) для построения искусственных характеристик двигателей последовательного и смешанного возбуждения не представляется возможным, так как магнитный поток этих двигателей не остается постоянным при изменении нагрузки. Для того чтобы все же можно было использовать уравнение (3.11) для построения искусственных скоростных характеристик двигателей последовательного и смешанного возбуждения, заменим в нем величину cE Ф из выражения (3.5), после чего полу-
чим выражение (3.9). |
|
|
|||
ω |
|
|
|
|
|
ω0 |
|
|
а |
|
и |
|
|
б |
R |
||
ωc |
|
|
|
||
|
|
|
|
яце |
|
|
|
|
в |
RяцΣ1 |
|
|
RяцΣ3 |
|
г |
RяцΣ2 |
|
|
|
|
|
|
|
|
I |
I |
I |
I |
Iя |
0 |
c |
2 |
н д |
1 |
|
Мс М2 Мн |
М1 М R |
||||
|
|
|
а |
|
|
|
ω |
|
|
М(Iя) |
|
||
Rдоб2 |
Rдоб1 |
|
|
|
|||
|
ж |
ωн |
ω2 |
|
|
|
|
|
|
Rяце |
ω1 |
|
|||
д |
е |
|
|
||||
|
|
|
|
|
м |
|
|
в |
|
|
|
RяцΣ1 |
|
||
|
|
|
|
л |
|
||
г |
|
|
|
|
|
||
|
I |
I |
RяцΣ2 к I |
Iя |
|||
б |
з |
||||||
н |
2 |
|
1 |
|
|||
а |
0 Rяце |
Мн |
М2 |
|
М1 |
М |
|
|
|
||||||
R1 |
(Мс) |
|
|
|
|
||
R2 |
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
Рис. 3.11 |
|
|
|
|
|
|
|
Для построения искусственной характеристики по уравнению (3.9) необходимо располагать естественной скоростной характеристикой двигателя. Построение искусственной скоростной характеристики с помощью зависимости (3.9) производится в такой последовательности: задаются несколькими значениями токов Iя ; по естественной скоростной характеристике двигателя
находят соответствующие этим токам скорости ωe ; зная токи Iя и скорости ωe , по уравнению (3.9) подсчитывают скорости ωи .
Для построения искусственных механических характеристик необходимо иметь дополнительно зависимость M ( Iя ) , используя которую и зная
токи, можно определить моменты двигателя.
Расчет сопротивления ступеней пускового реостата и их выключение в процессе пуска производятся так, чтобы момент двигателя изменялся в зара-
60
нее выбранных пределах между максимальным M1 и минимальным M 2 значениями. Этим моментам соответствуют определенные токи якоря Iя1 и Iя2 .
Во многих схемах процесс выключения сопротивлений при пуске двигателей автоматизируется в функции скорости, тока или времени (см. разд. 8.3).
От выбора величин моментов M1 и M 2 зависят продолжительность
(время) пуска, плавность пуска, число пусковых ступеней и количество контактов для их выключения. Необходимо также учитывать, что наибольшие значения момента M1 и тока Iя1 не должны превышать допустимых значе-
ний. Кроме того, что очевидно, для организации пуска двигателя необходимо, чтобы M 2 > M c . Наименьшее значение момента M 2 обычно принимают рав-
ным M 2 = (1,1 ÷1,2) M c .
В пределах, ограниченных наибольшим значением M1 и наименьшим значением M 2 , моменты M1 и M 2 можно изменять. Уменьшение M1 и увеличение M 2 приводит к более плавному пуску, так как момент двигателя бу-
дет при этом колебаться в более узких пределах. Однако получение более плавного пуска сопряжено с увеличением числа пусковых ступеней реостата и контактов для их выключения (обычно m = 2 ÷ 4 ). Время пуска при прочих равных условиях зависит от величины момента двигателя. Поэтому при напряженном режиме работы момент M1 следует увеличивать вплоть до его
наибольшего допустимого значения. Дополнительно можно сократить время пуска в результате увеличения момента M 2 . Если время пуска не имеет су-
щественного значения, желательно принимать момент M 2 наименьшим и по возможности уменьшать момент M1 .
В связи с выше сказанным, при известном числе ступеней пускового реостата m можно обеспечить два способа пуска ДПТ [1]: 1) нормальный пуск, когда по условиям технологического процесса не требуется быстрого ускорения привода (применяется для редко запускаемых механизмов); 2) форсированный пуск для механизмов циклического действия (см. разд. 7), когда требуется быстрое изменение скорости привода.
При одинаковом числе пусковых ступеней и одних и тех же значений M c , m и M 2 момент двигателя последовательного возбуждения изменяется
при пуске в меньших пределах, что позволяет получить более плавный пуск. Если построить пусковые характеристики для одних и тех же моментов M1 и
M 2 , то легко убедиться в том, что пусковой реостат двигателя последова-
тельного возбуждения будет иметь меньше ступеней. Таким образом, в отношении пусковых свойств двигатель последовательного возбуждения имеет определенные преимущества.
В ряде случаев дополнительно к рассмотренным выше пусковым сопротивлениям включают еще ступень сопротивления, называемую предварительной. С помощью такой ступени пусковой момент двигателя снижается до