

Виды движения твердого тела
В реальных физических задачах часто нельзя пренебречь размерами и формой движущихся тел, то есть нельзя рассматривать эти тела как материальные точки. В простейшем случае тело можно рассматривать как систему большого числа материальных точек, жестко связанных между собой. Такие тела в физике называют абсолютно твердыми. Деформацией абсолютно твердых тел можно пренебречь, и расстояние между любыми двумя точками абсолютно твердого тела не изменяется при каких-либо воздействиях.
Поступательным движением твердого тела называется такое движение, при котором все его точки движутся по одинаковым траекториям. Это означает, что скорости и ускорения всех точек тела в любой момент времени одинаковы.
При этом прямая, проведенная через любые две точки тела при движении остается параллельной самой себе. Чтобы описать поступательное движение твердого тела, достаточно описать движение одной его точки.
П
Рис. 1.15.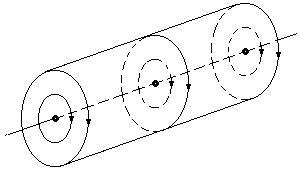
П
Рис.1.16.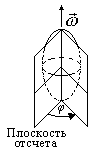
![]() и угловые ускорения
и угловые ускорения
![]() будут одни и те же. Соответствующие им
векторы
и
будут одни и те же. Соответствующие им
векторы
и
![]() направлены вдоль оси вращения. Для
описания вращения твердого тела
достаточно задать зависимость угла
поворота от времени
направлены вдоль оси вращения. Для
описания вращения твердого тела
достаточно задать зависимость угла
поворота от времени
![]()
При равномерном
вращении угловая скорость постоянна,
а угол поворота
![]() вычисляется по формуле
вычисляется по формуле![]() .
Здесь
.
Здесь
![]() угол поворота в начальный момент отсчета
времени,
угол поворота в начальный момент отсчета
времени,
![]() При
равноускоренном вращении постоянным
является угловое ускорение, а угловая
скорость и угол поворота подчиняются
кинематическим формулам равноускоренного
движения по окружности:
При
равноускоренном вращении постоянным
является угловое ускорение, а угловая
скорость и угол поворота подчиняются
кинематическим формулам равноускоренного
движения по окружности:
![]() ,
,
![]() ,
,
![]() ,
, .
.![]()
Системы отсчета – это тело отсчета (условно неподвижное), система координат, часы.
Система координат – комплекс определений, реализующий метод координат, то есть способ определять положение точки или тела с помощью чисел или других символов. Совокупность чисел, определяющих положение конкретной точки, называется координатами этой точки.
Основная задача механики – зная положение и скорость точки в начальный момент времени найти положение и скорость точки в любой другой момент времени
Материальная точка – тело, размерами и форматами которого можно пренебречь (но не массой!)
Криволинейное движение материальной точки – это всегда движение с ускорением, даже если по модулю скорость постоянна. Криволинейное движение с постоянным ускорением всегда происходит в той плоскости, в которой находятся векторы ускорения и начальные скорости точки. В случае криволинейного движения с постоянным ускорением в плоскости xOy проекции vx и vy ее скорости на оси Ox и Oy и координаты x и y точки в любой момент времени t определяется по формулам
Траектория, перемещение и путь – траектория – линия, по которой движется материальная точка. Перемещение – вектор, проведенный из начальной точки в конечную. Путь – длина участка траектории. Как правило, длина пути больше перемещения
Средняя
и мгновенная скорости
– средний вектор скорости направлен
по перемещению
![]() .
Средний модуль скорости (средняя
путевая)
.
Средний модуль скорости (средняя
путевая)
![]() .
.
Мгновенная скорость – производная радиус-вектора по времени и характерезует быстроту изменения радиус-вектора со временем. Мгновенная скорость направлена по касательной к траектории. По величине скорость равно производной пути.
 Учитывая,
что для бесконечно малого участка
траектории
Учитывая,
что для бесконечно малого участка
траектории
![]() ,
получим для модуля мгновенной скорости
,
получим для модуля мгновенной скорости
![]()
Среднее
и мгновенное ускорения
– Средний вектор ускорения
 .
.
Мгновенное ускорение (в данный момент времени) производная скорости по времени характеризует быстроту её изменения со временем. Вторая производная – радиус вектора
![]() Учитывая,
что
Учитывая,
что
![]() ,
получим
,
получим
![]()
Нахождение
пути по заданной скорости
–
2. Кинематика движения материальной точки по окружности- характеризуется углом dφ.
![]() -
вектор углового пути
-
вектор углового пути
ω (с вектором) – угловая скорость. Характеризует быстроту движения материальной точки по окружности (рад/с)
В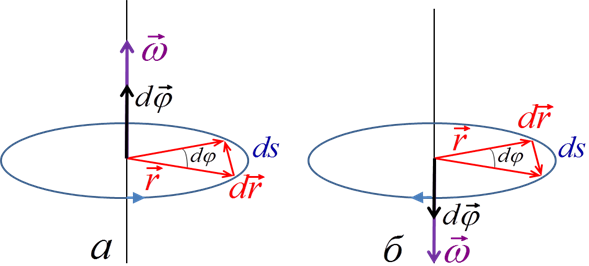 ектор
угловой скорости равен
ектор
угловой скорости равен![]()
Угловая скорость и вектор пути сонаправлены
![]()
![]()
![]() ,
,
Быстроту
изменения угловой скорости
характеризует вектор углового
ускорения
,
равный
производной угловой скорости по времени:
![]()
Е сли
векторы
и
направлены в одну и ту же или противоположные
стороны, то же самое можно сказать и о
векторах
и
(рис.
1.10, а,
б).
В случае, изображенном на рис. 1.10, a
угловая и линейная скорости движения
увеличиваются – движение ускоренное.
На рис. 1.10, б
и
,
и
уменьшаются – движение замедленное.
сли
векторы
и
направлены в одну и ту же или противоположные
стороны, то же самое можно сказать и о
векторах
и
(рис.
1.10, а,
б).
В случае, изображенном на рис. 1.10, a
угловая и линейная скорости движения
увеличиваются – движение ускоренное.
На рис. 1.10, б
и
,
и
уменьшаются – движение замедленное.
Рис. 1.10.
Выразим через
угловые характеристики движения
компоненты линейного ускорения
и
.
Модуль тангенциального ускорения
![]() .
Учитывая, что
.
Учитывая, что
![]() ,
получим
,
получим![]() или
или
![]() .
.
В векторной форме
![]() .
.
Модуль нормального
ускорения
![]() или
или
![]()
В векторной форме
![]()
Угловая скорость
при равномерном вращении
![]() .
Угловой путь за один оборот равен 2
радиан, тогда
.
Угловой путь за один оборот равен 2
радиан, тогда
![]()
φ=2п=ωТ
3. Масса- мера инертности
Сила- мера взаимодействия тел. Принцип независимости - силы действуют независимо друг от друга не изменяют друг друга
Равнодействующая – F=F1+F2 (с векторами) по параллелограмму (рисунок)
Iзакон Ньютона. Существуют такие системы отсчета, называемые инерциальными , в которых свободное или квазисвободное тело сохраняет свою скорость.
IIзН. Сила- произведение массы на ускорение. Скорость изменения импульса тела равна действующей на тело силе.
F=ma(с
векторами) Сделаем
обобщение и сформулируем второй закон
Ньютона:
Если
![]() ,
а ускорение тела
,
а ускорение тела
![]() ,
тогда
,
тогда
![]() .
Введем массу тела под знак дифференциала
.
Введем массу тела под знак дифференциала![]() и,
учитывая, что
и,
учитывая, что
![]() ,
получим
,
получим![]()
III з.Н. - в инерциальных системах отсчета силы, с которыми взаимодействуют две любые материальные точки, равны по величине, противоположны по направлению и действуют вдоль прямой, их соединяющей.
Преобразования Галилео Галлилея
r=r’+V0t (r свекторами) Скорость в подвижной и неподвижной системах разная. Ускорение одинаковое
Механический принцип относительности ГГ. Все физические явления протекают одинаково в инерциальных СО