

1.6. Ручной привод грузоподъемных машин
Момент статического сопротивления движению на приводном валу механизма
Тс = zFr, |
(1.83) |
где z — число рабочих; — коэффициент неодновременности приложения усилий рабочими; F — усилие рабочего (табл. 1.30); r — плечо рукоятки (радиус цепного колеса, штурвала).
Момент на грузовом валу
Тг = Тси, |
(1.84) |
где и — передаточное число привода механизма; — КПД механизма.
Скорость подъема груза (м/с)
r
=
|
(1.85) |
где
![]() — скорость движения руки рабочего в
точке приложения усилия, м/с; Q
— масса поднимаемого груза, кг.
— скорость движения руки рабочего в
точке приложения усилия, м/с; Q
— масса поднимаемого груза, кг.
При расчете ручного привода грузоподъемных машин средняя скорость движения руки рабочего в точке приложения усилия: на рукоятке — 1 м/с; на тяговой цепи — 0,6 м/с; коэффициент неодновременности приложения усилий для двух человек — 0,8, для четырех — 0,7; радиус (плечо) r вращения рукоятки — до 400 мм; ход рукоятки — до 400 мм; ход педали — до 250 мм; угол поворота рычага — до 60°.
Табл. 1.30. Расчетные усилия ручного привода грузоподъемных машин
Вид усилия |
Продолжительность приложения усилия, мин |
Наибольшее допускаемое усилие, Н |
На рукоятке |
Свыше 5 |
120 |
|
До 5 |
200 |
На тяговой цепи |
Свыше 5 |
200 |
|
До 5 |
400 |
На педали |
Свыше 5 |
250 |
|
До 5 |
350 |
Прикладываемое для пере- |
Трогание с места |
300...500 |
движения тележки |
До 5 |
200 |
(толкание) |
До 10 |
100 |
|
До 15 |
80 |
Расчетное усилие при про- |
- |
800 |
верке на прочность элементов ручного управления |
|
|
То же, ручного механизма с тяговой цепью |
- |
1200 |
1.7. Выбор, проверка и обозначение электродвигателей
Для привода подъемно-транспортных машин преимущественно применяются электродвигатели переменного тока, для привода механизмов грузоподъемных машин — крановые асинхронные электродвигатели, характеризующиеся повышенной перегрузочной способностью. Удобные в эксплуатации асинхронные двигатели с короткозамкнутым ротором применяются для привода электроталей, кран-балок, тихоходных механизмов кранов и подъемников, работающих в повторно-кратковременном режиме при небольшой частоте включения. При более напряженном режиме применяют асинхронные двигатели с контактными кольцами. Сведения об электродвигателях приводятся в табл. III. 3.
Электродвигатель подбирается по каталогу согласно определенной (см. параграф 1.4) статической мощности и в соответствии с режимом эксплуатации механизма.
Расчетная мощность двигателя
Pрасч
= Pном
|
(1.86) |
где Pном — номинальная мощность двигателя по каталогу при ПВном; ПВном— номинальная относительная продолжительность включения, ближайшая по каталогу к ПВрасч; ПВрасч — расчетная относительная продолжительность включения.
Выбранный двигатель должен быть проверен на время пуска при действии наибольшей нагрузки [см. (1.67)... (1.73) или (1.87)].
Время (с) пуска (разгона)
= |
(1.87) |
где
![]() —
момент инерции эквивалентной системы
механизма, приведенный к валу двигателя
[см. (1.34)...(1.57)], кг·м2;
n
— частота вращения вала двигателя,
мин-1;
Тизб
— избыточный момент двигателя, Н·м:
—
момент инерции эквивалентной системы
механизма, приведенный к валу двигателя
[см. (1.34)...(1.57)], кг·м2;
n
— частота вращения вала двигателя,
мин-1;
Тизб
— избыточный момент двигателя, Н·м:
Тизб = Тср.п – Тс, |
(1.88) |
Тср.п — средний пусковой момент двигателя, Н·м; Тс — момент статических сопротивлений механизма на валу двигателя [см. (1.27)...(1.32)], Н·м.
Для двигателей трехфазного тока с фазным ротором
Тср.п
=
|
(1.89) |
где
![]() =
Тmax/
Тном -
максимальная кратность пускового
момента электродвигателя:
=
1,9...3,2, (определяется по каталогу);
=
Тmax/
Тном -
максимальная кратность пускового
момента электродвигателя:
=
1,9...3,2, (определяется по каталогу);
![]() —
минимальная кратность пускового момента
электродвигателя:
=
l,l...l,4;
Тmax
— максимальный пусковой момент двигателя,
Н·м; Тном
— номинальный момент двигателя, Н·м.
—
минимальная кратность пускового момента
электродвигателя:
=
l,l...l,4;
Тmax
— максимальный пусковой момент двигателя,
Н·м; Тном
— номинальный момент двигателя, Н·м.
Для электродвигателей трехфазного тока с фазным ротором можно принимать Тср.п = (1,5... 1,6) Тном. Для двигателей с короткозамкнутым ротором
Тср.п
=
0,852 |
(1.90) |
где
![]() — кратность пускового момента двигателя
(принимается по каталогу); 0,852 —
коэффициент, учитывающий возможность
работы при падении напряжения в сети
до 85 % от номинального.
— кратность пускового момента двигателя
(принимается по каталогу); 0,852 —
коэффициент, учитывающий возможность
работы при падении напряжения в сети
до 85 % от номинального.
Для электродвигателей с короткозамкнутым ротором можно принимать Тср.п = (0,7...0,8) Тmax.
Для обеспечения разгона двигателей трехфазного тока рекомендуется, чтобы Тср.п >1,5 Тс и Тср.п =0,5(Тmax + Тс).
Во избежание перегрева электродвигателя необходимо, чтобы развиваемая двигателем среднеквадратичная мощность удовлетворяла условию
Рср Рном. |
(1.91) |
Среднеквадратичная мощность электродвигателя (кВт)
Рср
=
|
(1.92) |
где Тср — среднеквадратичный момент преодолеваемый электродвигателем, Н·м:
Тср
=
|
(1.93) |
 ,
,
где
![]() —
общее время пуска (разгона) механизма
в разные периоды работы с различной
нагрузкой [см. (1.67) ... (1.73)], с;
—
общее время пуска (разгона) механизма
в разные периоды работы с различной
нагрузкой [см. (1.67) ... (1.73)], с;
![]() —
сумма произведений квадрата момента
статических сопротивлений движению
при данной нагрузке [см. (1.27) ... (1.32)] на
время установившегося движения при
этой нагрузке;
—
сумма произведений квадрата момента
статических сопротивлений движению
при данной нагрузке [см. (1.27) ... (1.32)] на
время установившегося движения при
этой нагрузке;
![]() —общее время включения электродвигателя
за цикл, с.
—общее время включения электродвигателя
за цикл, с.
Если
tп
ty/60,
то в знаменателе подкоренного выражения
в формуле (1.93) должно быть
+
![]() ,
где
— коэффициент, учитывающий ухудшение
условий охлаждения двигателя в процессе
пуска: для закрытых двигателей
= 0,85...0,99,
для защищенных и открытых —
= 0,62...0,68;
—
общее время установившегося движения
за цикл, с.
,
где
— коэффициент, учитывающий ухудшение
условий охлаждения двигателя в процессе
пуска: для закрытых двигателей
= 0,85...0,99,
для защищенных и открытых —
= 0,62...0,68;
—
общее время установившегося движения
за цикл, с.
При отсутствии достоверного графика работы крана предварительная проверка электродвигателя по условиям нагрева может быть произведена методом номинального режима работы [18], т. е. методом отнесения крановых механизмов к режимам работы [14].
Коэффициент перегрузки двигателя при номинальной нагрузке
= Тс/Тном. |
(1.94) |
Перегрузочная способность двигателя
= Тmax/Тном. |
(1.95) |
Значения приводятся в каталогах электродвигателей (табл. III.3).
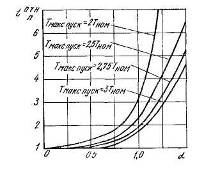
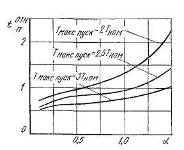
По рис. 1.4 и 1.5
определяется относительное время пуска
t![]() .
.
Время пуска
tп
= t
|
(1.96) |
Среднее время рабочей операции (с)
tр = sp/ф, |
(1.97) |
где sp — средняя длина рабочего пути, м; ф — фактическая скорость движения, м/с.
|
|
Рис. 1.4. График для определения относительного времени пуска (разгона) привода с двигателем с фазным ротором (трехфазный ток) |
Рис. 1 5. График для определения относительного времени пуска (разгона) привода с короткозамкнутым двигателем (трехфазный ток) |
Отношение времени пуска к среднему времени рабочей операции
= tп / tр. |
(1.98) |
Если средняя длина рабочего пути неизвестна, для предварительных расчетов можно воспользоваться табл. 1.31.
Требуемая эквивалентная мощность двигателя для рабочей части цикла
Рэ = Рс, |
(1.99) |
где — вспомогательный коэффициент, определяется по графику влияния пусковых режимов на эквивалентную мощность (рис. 1.6); Рс — см. (1.33).
Табл. 1.31. Ориентировочное значение коэффициента
Наименование механизмов |
|
Механизмы подъема крюковых и грейферных кранов, работающих в цехах и на складах |
0,1 |
Механизмы передвижения кранов, работающих в цехах |
0,2 |
Механизмы передвижения кранов, работающих на складах |
0,1 |
Механизмы поворота стреловых кранов, работающих на складах и на строительстве |
0,3...0,4 |
Механизмы передвижения тележек рудных и угольных перегружателей |
0,3...0,4 |
Механизмы подъема, передвижения и поворота монтажных кранов |
0,2...0,3 |
Требуемая мощность двигателя по условиям нагрева с учетом пауз в течение цикла
РПВ = kРэ, |
(1.100) |
где k — коэффициент, учитывающий номинальную относительную продолжительность включения (ПВ), характерную для данного номинального режима работы (табл. 1.32).
|
Рис. 1.6. График зависимости эквивалентной мощности от отношения времени пуска к среднему времени рабочей операции для механизмов: А—передвижения мостов кранов, передвижения магнитных и грейферных кранов, поворота стреловых кранов; Б — передвижения тележек крюковых кранов, подъема магнитных и грейферных кранов; В — подъема крюковых кранов |
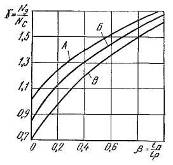
Табл. 1.32. Значения коэффициента k [к формуле (1.100)]
Режим работы |
Значение коэффициента k при ПВ |
|
25 % |
40 % |
|
Легкий |
0,5 |
0,35 |
Средний |
0,75 |
0,5 |
Тяжелый |
1,0 |
0,75 |
Весьма тяжелый |
1,5 |
1,0 |
Необходимо обеспечить условие
РПВ Рном.
Для двигателей трехфазных асинхронных крановых в ГОСТ 185—70 установлена следующая структура обозначения типа двигателя:

где 1 — обозначение серии; 2 — исполнение ротора (фазный — обозначение отсутствует, К — короткозамкнутый); 3 — класс нагревостойкости изоляции (F); 4 — условный габарит; 5 — порядковый номер серии; 6 — условная длина сердечника; 7 — число полюсов (6, 8, 10); 8 — климатическое исполнение и категория размещения по ГОСТ 15150—69. У — исполнение для эксплуатации в районе с умеренным климатом: 1—размещение в отапливаемом помещении.
Например, двигатель серии МТ с фазным ротором класса нагревостойкости изоляции F, третьего габарита первой серии, первой длины, шестиполюсный, климатического исполнения У, категории размещения 1 обозначается:
Двигатель MTF 311-6У1 ГОСТ 185—70.
Для двигателей трехфазных асинхронных короткозамкнутых серии 4А в ГОСТ 19523—81 установлена следующая структура обозначения типа двигателя:
![]()
где 1 – порядковый номер серии; 2 — вид двигателя (асинхронный); 3 — исполнение двигателя по способам охлаждения и защиты от окружающей среды (Н — защищенные; для закрытых обдуваемых знак отсутствует; 4 — исполнение двигателя по материалу станины и щитов (А — станина и щиты алюминиевые; X — станина алюминиевая, щиты — чугунные; отсутствие знаков означает, что станины и щиты чугунные или стальные); 5 —- высота оси вращения (три или две цифры); 6 — установочный размер по длине станины (S, М или L); 7— длина сердечника статора (А или В) при условии сохранения установочного размера; 8 — число полюсов (2, 4, 6, 8, 10 или 12); 9 — исполнение двигателя: химически стойкого (X), повышенной точности по установочным размерам (П), пылезащитного (УП); 10 — климатическое исполнение и категория размещения по ГОСТ 15150—69. Исполнение для эксплуатации в районе с умеренным климатом имеет обозначение У; категория размещения для эксплуатации под навесом или в помещениях — 3.
Например, асинхронный трехфазный двигатель четвертой серии, защищенный, со станиной и щитами из чугуна, с высотой оси вращения 280 мм, с установочным размером по длине станины М, двухполюсный, климатического исполнения У, категории 3 обозначается:
Двигатель 4АН280М2УЗ ГОСТ 19523—81.
Структура условного обозначения конструктивного исполнения и способа монтажа двигателя по ГОСТ 2479—79:
![]() ,
,
где 1 — латинские буквы 1М (для конструктивных исполнений, оговоренных в СТ СЭВ 246—76) или М (для конструктивных исполнений, не оговоренных в СТ СЭВ 246—76, но установленных в ГОСТ 2479—79); 2 — конструктивное исполнение (одна цифра; для двигателей на лапах—1); 3 — способ монтажа (две цифры; для двигателя на лапах при горизонтальном расположении конца вала - 00; при любом расположении — 08); 4 — исполнение конца вала (одна цифра по ГОСТ 18709—73). Подробнее см. ГОСТ 2479—79.
Обозначение двигателей с повышенным пусковым моментом по ГОСТ 20818—75 отличается от обозначения двигателей основного исполнения дополнительной буквой Р после обозначения серии и номером стандарта. Например,
Двигатель 4АР 180М4УЗ ГОСТ 20818—75.
Сведения о двигателях серии 4А приводятся в табл. III.3.1...III.3.4; о крановых двигателях — в табл. III.5... III.7.