

17.Общий алгоритм решения задач по определению точек пересечения прямой с поверхностью многогранника. Определение видимости прямой.
Алгоритм:
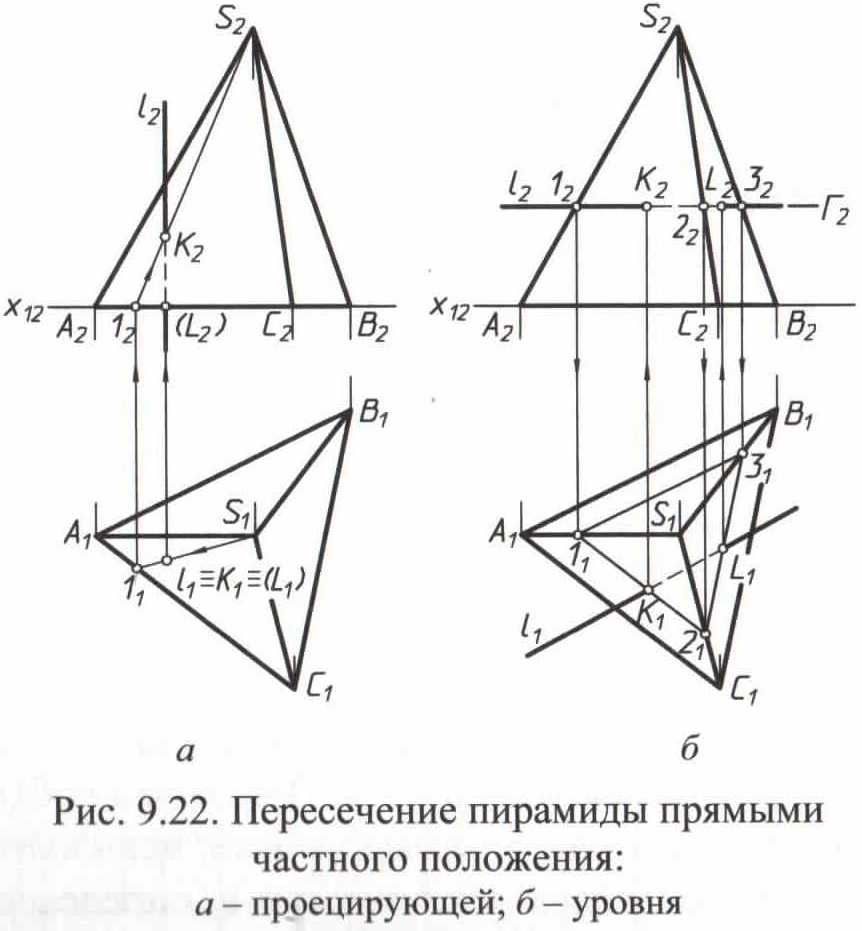
Заключить прямую во вспомогательную плоскость частного положения ( проецирующую)
Найти фигуру сечения многогранника вспомогательной плоскостью
Определить точки пересечения прямой с найденным сечением
Установить видимость прямой.
Условимся считать что многогранные поверхности ограничивают одно сплошное монолитное ( целое) тело, поэтому между точками пересечения сплошная тонкая линия.
18. Пересечение многогранников. Приемы построения линии пересечения многогранников способом ребер и способом граней.
Линия пересечения двух многогранных поверхностей может быть плоской или как правило, пространственной ломаной линией.
Способ ребер:
1. анализируют ребра одного из многогранников и находят точки пересечения каждого ребра этого многогранника с гранями другого
2. анализируют ребра 2-го многогранника и находят точки пересечения их с гранями 1-го
3. через найденные точки в определенной последовательности проводят ломаную линию, которая и представляет собой линию пересечения многогранников. Соединять прямыми можно только те точки, которые лежат в одной грани.
Способ граней:
По этому способу определяют отрезки прямых по которой грани одного многогранника пересекают грани другого
Примечания:
Если один из пересекающихся многогранников представляет собой прямую призму, то одна проекция линии пересечения уже есть
Если одна из проекций ребра одного из многогранников не пересекает проекции граней другого, то данное ребро и в пространстве не пересекает эту грань.
19. Развертывание поверхностей многогранника ( призмы, пирамиды)
Разверткой называется фигура полученная совмещением поверхности многогранника с плоскостью.
Цель развертывания – создание моделей поверхностей из листового материала путем последнего изгибания.
Для построения разверток многогранников определяют натуральный вид всех его граней, при этом используют различные способы преобразования чертежа.
Способы построения развертки многогранников:
Способ нормального сечения (для призматических поверхностей)
Способ раскатки (для призматических поверхностей)
Способ треугольников (для пирамид)
20. Кривые линии (основные сведения). Кривые поверхности. Кинематический и каркасный способы задания поверхности. Определитель. Геометрическая и алгоритмическая части определителя. Классификация поверхностей.
Кривую линию можно представить как траекторию точки, движущейся на плоскости или в пространстве. Кривые линии разделяют на циркульные и лекальные.
Кривые линии, все точки которых лежат в одной плоскости, называют плоскими, остальные пространственными. Наиболее часто встречающиеся на практике плоские кривые, такие как окружность, эллипс, парабола, гипербола и т.д. являются кривыми второго порядка. Примером пространственной кривой линии является винтовая линия.
Геометрически порядок плоской кривой определяется наибольшим числом точек ее пересечения с прямой линией.
Кривые поверхности: общего вида, вращения и винтовые. Они делятся на линейчатые (развертываемые и неразвертываемые) и нелинейчатые (с постоянной образующей и с переменной образующей).
Кинематический способ. В НГ геометрические фигуры задаются графически, поэтому поверхности следует рассматривать как совокупность всех положений некоторой перемещающейся в пространстве линии, которая называется образующей поверхности. Неподвижные линии, которые управляют движением образующей, называют направляющей поверхности.
Существует способ задания поверхности каркасом. Образующие могут быть как прямыми, так и кривыми у нелинейчатых поверхностей. Поэтому выделяют два класса поверхностей: линейчатые и нелинейчатые.
Под определителем поверхности подразумевают необходимую и достаточную совокупность фигур и связей между ними, которые задают поверхность.
Геометрическая часть определителя содержит форму образующей и направляющей, а алгоритмическая – задает законы движения и изменения формы образующей в процессе движения. Геометрическая часть определителя может задаваться в виде числа (например, R50), а алгоритмическая – в виде описания (например, словом «Сфера» или «Вращения»).