

27. Асинхронный двигатель. Т-и г-образная схема замещения. Основные уравнения двигателя в рабочем режиме.
Электрическую энергию в механическую энергию поступательного движения преобразуют линейные асинхронные электродвигатели, которые широко используются в электрической тяге, для выполнения технологических операций. Широкое применение АД связано с рядом их достоинств. Принцип действия асинхронного двигателя основан на использовании вращающегося магнитного поля. Для уяснения работы такого двигателя проделаем следующий опыт. Укрепим подковообразный магнит на оси таким образом, чтобы его можно было вращать за ручку. Между полюсами магнита расположим на оси медный цилиндр, могущий свободно вращаться.
Т-образная схема замещения асинхронного двигателя
Полная схема замещения асинхронного двигателя при вращающемся роторе отличается от схемы замещения асинхронного двигателя с заторможенным ротором только наличием в цепи ротора активного сопротивления, зависящего от нагрузки (рис. 1, а). Эту схему замещения называют Т-образной. Следовательно, и в этом случае удается свести теорию асинхронной машины к теории трансформатора.
Т-образная схема замещения асинхронного двигателя
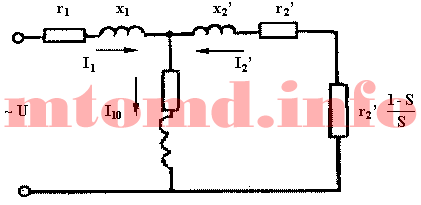
Рис. 1
Сопротивления намагничивающего контура значительно меньше соответствующих значений для схемы замещения трансформатора, так как ток холостого хода асинхронного двигателя гораздо больше, чем у трансформатора. Если при рассмотрении работы трансформатора часто можно пренебречь намагничивающим контуром, то при рассмотрении работы асинхронного двигателя этого сделать нельзя, так как ошибка может получиться значительной.
Сопротивление r2‘(1 – S)/S можно рассматривать как внешнее сопротивление, включенное в обмотку ротора. Оно является единственным переменным параметром схемы. Изменение этого сопротивления эквивалентно изменению нагрузки на валу двигателя, а следовательно, изменению скольжения S.
Г-образная схема замещения асинхронного двигателя
Можно упростить вычисления, преобразовав Т-образную схему замещения в Г-образную, как это показано на рисунке 2, позиции а. Для Г-образной схемы замещения имеем:
![]()
![]()
Г-образная схема замещения асинхронного двигателя

Рис. 2
При анализе электромагнитных процессов в машинах общего применения часто полагают С1≈1, что существенно облегчает расчеты и мало влияет на точность полученных результатов. Г-образную схему замещения при С1 = 1 называют упрощенной схемой замещения с вынесенным намагничивающим контуром
28. Энергетические процессы в асинхронном двигателе. Баланс активной и реактивной мощности. Потери и кпд асинхронного электродвигателя.
Р(1) – активная мощность потребляемая из сети.Р(1)=(3^0,5)*U(1)*I(1)*cos(фи(1))
(дельта)Р(э1) – эл. потери в обмотках статора. (дельта)Р(э1)=3*(I(1)^2)*R(1). Р(вр.п) – мощность вращающегося магнитного поля. (дельта)Р(м1) – магнитные потери в сердечнике статора. (дельта)Р(м1)= 3*(I(0)^2)*R(0). Р(эм) – эл. магнитная мощность – мощность, передаваемая через воздушный зазор между статором и ротором. (дельта)Р(э2) – потери на нагрев обмотки ротора. (дельта)Р(э2)=3*(I(2)(‘)^2)*R(2)(‘)
Р(мех) – механическая мощность, развиваемая двигателем. (дельта)Р(мех) – механические потери мощности на трение в подшипниках и на сопротивление воздуха вращению ротора. Р(2н) – выходная полезная мощность двигателя. На диаграмме не отображены магнитные потери в сердечнике ротора, так как частота тока в роторе f(2)=f(1)*S, а при номинальном режиме работы скольжение мало, то частота f(2) тоже принимает не большие значения: f(2)=1,0-2,5Гц.
Т.е магнитные потери сердечника ротора приближённо равны 0, поэтому их не учитывают. Уравнение баланса активной мощности можно записать так: Р(2)=Р(мех)-(дельта)Р(мех) (1) Р(1)= Сумма(дельта)Р+Р(2) – уравнение баланса.
КПД двигателя:
(Эта)=Р(2)/Р(1)=(Р(1)-Сумма(дельта)Р)/Р(1)=1-(Сумма(дельта)Р/Р(1)) меньше 1 (70-80 процентов)
Уравнение баланса реактивной мощности имеет вид: Q(1)=Q(p1)+Q(мю)+Q(p2). В этом уравнении все величины аналогичны величинам для трансформатора.
Двигатель потребляет реактивную мощность:
Q=3*U(ф1)*I(ф1)*sin(фи(1)) Часть этой мощности расходуется на создание поля рассеяния обмоток статора Q(p1), часть – на создание поля рассеяния обмоток ротора Q(p2). Основную часть реактивной мощности составляет мощность Q(мю). Она идёт на создание основного магнитного потока. Причём из-за наличия воздушного зазора между статором и ротором двигателя, величина Q(мю) значительно больше, чем в трансформаторе.