

§ 47. Регулирование угловой скорости асинхронных двигателей
Согласно уравнению угловой скорости асинхронного двигателя
ω = ω (1 - s) = (2πf /p)(1 - s)
регулирование его частоты вращения можно осуществить:
- изменением частоты тока f питающей сети;
- изменением числа пар полюсов р обмотки статора;
- введением дополнительных резисторов, обладающих активными сопротивлениями, в цепь обмотки ротора, что ведет к изменению скольжения s.
Первый способ заключается в том, что при изменении частоты тока, подводимого к зажимам двигателя, изменяется синхронная скорость вращающегося магнитного поля статора. Следовательно, изменяется и угловая скорость ротора двигателя. Этот способ применяется лишь в том случае, когда двигатель получает питание от отдельного синхронного генератора или тиристорного преобразователя частоты (тиристорный электропривод).
Второй способ регулирования угловой скорости изменением числа пар полюсов обмотки статора находит широкое применение в судовых электроприводах с асинхронными короткозамкнутыми двигателями серии МАП. Электродвигатели, допускающие переключение числа пар полюсов, должны иметь в пазах статора либо две самостоятельные обмотки, либо одну обмотку с переключением ее секционных групп на различное число пар полюсов.
Основным недостатком этого способа регулирования скорости асинхронного двигателя является ступенчатость регулирования, а также неизбежность бросков тока и момента при переходе с одной скорости на другую.
Третий способ регулирования скорости двигателя введением добавочных резисторов в цепь обмотки ротора применим только для асинхронных электродвигателей с фазным ротором. Увеличение сопротивления в цепи ротора ведет к увеличению скольжения, что в свою очередь уменьшает скорость двигателя. В установившемся режиме момент, развиваемый двигателем, остается неизменным.
Основным недостатком этого способа регулирования скорости асинхронных двигателей является его неэкономичность и сравнительно небольшой предел регулирования (10 - 20% от номинальной скорости двигателя), он применяется в основном для механизмов, работающих в повторно-кратковременном режиме (электропривод грузоподъемных устройств).
Регулирование угловой скорости асинхронных двигателей можно осуществить введением в роторную цепь параллельно подключенных резисторов и реакторов или включением в статорную цепь управляемых дросселей.
§ 48. Торможение асинхронных двигателей
Для асинхронных двигателей применяются те же способы торможения, что и для двигателей постоянного тока: рекуперативное, динамическое и торможение противовключением.
Рекуперативное торможение асинхронного двигателя наступает тогда, когда угловая скорость ротора ω под действием внешних сил или инерции превысит синхронную угловую скорость ω вращающегося поля статора. При этом
э. д. с. статора становится больше приложенного напряжения. Асинхронный двигатель переходит в режим генератора с отдачей активной энергии в сеть и потреблением из сети реактивной энергии, необходимой для возбуждения машины.
Рекуперативное
торможение используется в грузоподъемных
устройствах при спуске тяжелых грузов.
Под действием опускаемого груза ротор
асинхронного двигателя разгоняется до
скорости ω > ω
.
Двигатель переходит в генераторный
режим, создавая тормозной момент, который
уравновешивается движущим статическим
моментом груза. При этом груз будет
опускаться с установившейся скоростью.
Рекуперативное торможение имеет место
и при переходе полюсопереключаемого
двигателя с большей угловой скорости
на меньшую. В этом случае скорость
двигателя окажется больше синхронной
скорости ω![]() ,
соответствующей новому числу пар
полюсов. Двигатель перейдет в
генераторный
режим с отдачей энергии
в сеть. При этом скорость двигателя
будет снижаться и при скорости ω = ω
он перейдет в двигательный режим.
Дальнейшее снижение скорости двигателя
будет происходить до тех пор, пока
момент, развиваемый двигателем, не
уравновесится статическим моментом
нагрузки.
,
соответствующей новому числу пар
полюсов. Двигатель перейдет в
генераторный
режим с отдачей энергии
в сеть. При этом скорость двигателя
будет снижаться и при скорости ω = ω
он перейдет в двигательный режим.
Дальнейшее снижение скорости двигателя
будет происходить до тех пор, пока
момент, развиваемый двигателем, не
уравновесится статическим моментом
нагрузки.
При динамическом торможении (рис. 2.96) размыкаются контакты К1 линейного контактора, отключая обмотку статора от сети трехфазного переменного тока. Замыкаются контакты К2 тормозного контактора, подключая две фазы статорной обмотки на пониженное напряжение постоянного тока. Источником постоянного тока в установках небольшой мощности являются полупроводниковые выпрямители VD, включенные через понижающий трансформатор TV к сети переменного тока. Постоянный ток, протекая по обмотке статора, создает неподвижное магнитное поле, которое индуктирует во вращающемся по инерции роторе э. д. с. Эта э. д. с. вызовет в обмотке ротора появление тока, который, взаимодействуя с неподвижным магнитным потоком статора, создает тормозной момент. Динамическое торможение позволяет осуществить торможение до полной остановки электропривода.
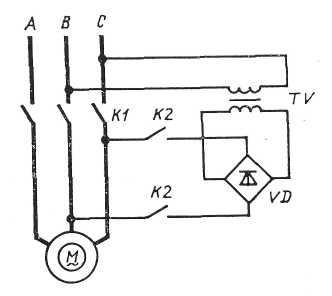
Рис. 2.96. Динамическое торможение асинхронных двигателей.
Торможение противовключением возникает тогда, когда ротор включенного в сеть асинхронного двигателя под действием внешних сил или по инерции вращается в сторону, противоположную направлению вращения магнитного поля статора. Этот способ торможения можно получить при реверсировании вращающегося асинхронного двигателя переключением двух фаз обмотки статора. При этом магнитное поле статора будет вращаться в направлении противоположном вращению ротора. В результате изменится направление э. д. с. и тока в обмотке ротора, соответственно изменится и направление момента двигателя, который для ротоpa, вращающегося в прежнем направлении, будет являться тормозным. При снижении скорости двигателя до нуля его статорную обмотку необходимо отключить от сети, иначе двигатель начнет вращаться в обратную сторону. При использовании режима противовключения для ускорения процесса реверсирования асинхронного двигателя его статорную обмотку не нужно отключать от сети.
Торможение противовключением применяется и для получения посадочных скоростей при опускании тяжелых грузов. Для этого в цепь ротора включают добавочные резисторы с большим активным сопротивлением. Двигатель под действием движущего статического момента груза будет вращаться в сторону, противоположную вращению магнитного поля статора. Скорость опускания груза регулируется изменением величины сопротивлений резисторов, включенных в роторную цепь двигателя.