

1.7. Сигнальные признаки многопозиционной активно-пассивной локации
Признаки целей различаются в зависимости от автономности или кооперативности работы аппаратуры на позициях [1, 25, 45].
При автономной или частично автономной работе аппаратуры на позициях признаки набираются независимо, в частности по указаниям пункта управления. Набор признаков с различных направлений на цель и в различных диапазонах частот расширяет возможности распознавания. Окончательное решение принимается на пункте управления по обобщенным траекторным характеристикам цели, а также по признакам или же предварительным решениям, принятым на позициях.
При реализации кооперативности приема образуется одна или несколько так называемых бистатических систем, в которых при зондировании с одной позиции прием сигналов осуществляется другой позицией. Дополнение моностатической локации бистатической расширяет возможности использования сигнальных признаков при узкополосном излучении в частности. При пересечении целью линии базы бистатического локатора эффективная площадь цели увеличивается, возрастают возможности элементов апертурного синтеза. Использование широкополосных сигналов и бистатической локации позволяет дополнительно получать двумерные портреты целей с существенно ослабленными эффектами затенения (рис. 1.21). Возрастают также возможности поляризационной селекции. [46-48].
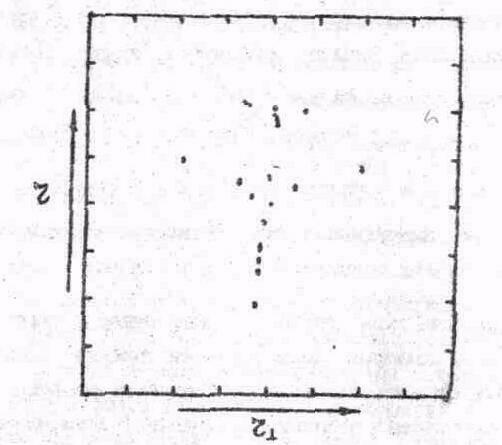
Рис. 1.21. "Мгновенный дальностно-азимутальный портрет цели, полученный для бистатической РЛС с шириной спектра 150 МГц при бистатическом угле 0,02°
Очевидно, что допустимая степень усложнения локационных систем определяется критерием "эффективность-стоимость".
1.8. Признаковые пространства распознавания
Отдельно взятый признак не обеспечивает обычно распознавание класса цели в требуемом алфавите с вероятностями не хуже заданных [2]. Объединение независимых или даже зависимых признаков позволяет повысить качество распознавания и расширить алфавит классов. В дополнение, к примеру, признакового пространства высота - полная скорость Н - v рис. 1.1 на рис. 1.22 приведен пример признакового пространства радиальный размер - ЭП целя 1ц — σц. Сплошными линиями выделены области признакового пространства, соответствующие параметрам целей: 1 - крупных размеров; 2 - средних размеров; 3 - малых размеров без искусственного увеличения ЭП; 4 - малых размеров с искусственным увеличением ЭП (ложных целей). Штриховые линии расширяют выделенные сплошными линиями области с учетом флюктуаций и ошибок измерения указанных величин. Легко убедиться, что совместный анализ признаков расширяет возможности распознавания, особенно пря переходе от двумерных к многомерным признакам.
Число признаков, включенных в признаковое пространство, должно уточняться в каждом конкретном случае. Увеличение числа признаков расширяет объем получаемой информации, особенно если привлекаются многомерные признаки (ДП, ДУП, ДПП). Критерием расширения состава признаков является известный системотехнический критерий "эффективность - стоимость»".
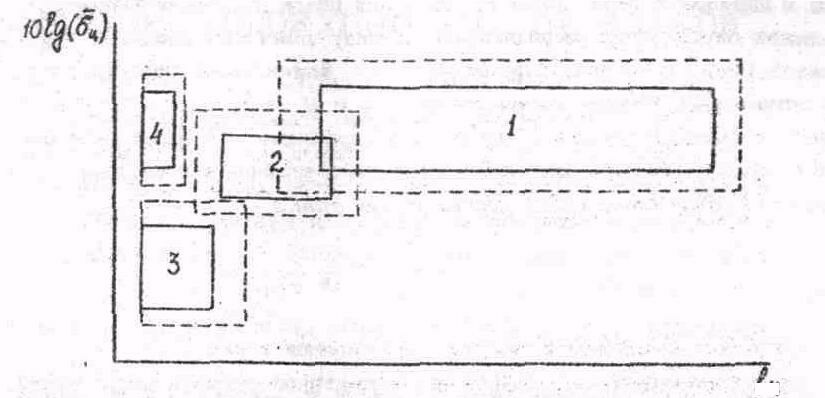
Рис. 1.22. Двумерное признаковое пространство 1ц(в м) – σц (в дБ): 1 – самолеты больших размеров; 2 - самолеты средних размеров; 3 - крылатые ракеты; 4 -ложные малоразмерные цели с искусственно увеличенной ЭП. Штриховыми линиями выделены области возможного разброса значений однократных оценок 1ц и σц