

3.4.3. Теорема об изменении кинетического момента системы
Кинетический момент механической системы относительно неподвижного центра равен геометрии-ческой сумме момента относительно этого центра количества движения системы, условно приложенного в центре масс, и кинетического момента системы относительно центра масс в ее относительном движении по отношению к центру масс.
![]() .
.
Теорема об изменении кинетического момента системы чаще всего применяется для исследования движения механической системы, состоящей из основного тела, несущего другие тела, при условии, что тело-носитель совершает вращательное движение относительно неподвижной оси или неподвижной точки (в частности, относительно центра масс), а движения несомых тел по отношению к основному заданы. При этом рекомендует-ся следующая последовательность решения задачи.
1. Изобразить материальную систему в промежуточный (или заданный) момент времени.
2. Изобразить на рисунке приложенные к системе внешние силы.
3. Провести оси координат. Их начало и их направления выбираются таким образом, чтобы суммы моментов внешних сил (активных и реакций) относительно наибольшего количества осей равнялись нулю. Если этого осуществить нельзя, то оси проводятся наиболее естественным образом, причем одна из них проводится вдоль оси вращения основного тела.
4. Записать формулы теоремы об изменении кинетического момента в проекциях на выбранные оси координат:
![]() ,
,
![]() ,
,
![]() .(a)
.(a)
5. Вычислить кинетические моменты системы Lx, Ly, Lz относительно осей для текущего момента времени, подставить их значения в уравнения теоремы и получить дифференциальные уравнения движения системы.
6. Используя дифференциальные уравнения, найти величины, подлежащие определению.
7. Если одна из правых частей уравнений (a) равна нулю, то относительно соответствующей оси выполняется закон сохранения кинетического момента системы/
Например, если
![]() ,
то Lх = const
= Lx0.
В этом случае решение задачи сводится
к определению кинетического момента
системы в начальный и текущий (или
заданный) моменты времени и приравниванию
этих значений друг другу.
,
то Lх = const
= Lx0.
В этом случае решение задачи сводится
к определению кинетического момента
системы в начальный и текущий (или
заданный) моменты времени и приравниванию
этих значений друг другу.
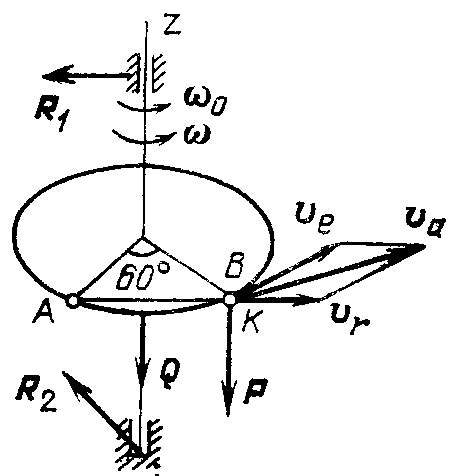
Пример 1. Круглая однородная горизонтальная платфор-ма радиусом r = √3 м и массой m1= 20 кг вращается без трения вокруг вертикальной оси с угловой скоростью ω = 2рад/с (рис. 442). В точке А на ободе платформы находится материальная точка К массой m2 = 10кг. В некоторый момент времени (t = 0) эта точка начинает двигаться по хорде АВ платформы с постоянной относительной скоростью vr = 4 м/с. Определить угловую скорость платформы, когда точка К попадает в точку В хорды АВ.
Решение.
Изобразим механическую систему, состоящую
из
платформы
и точки, в положении, когда материальная
точка К
находится
в точке В
платформы. В этот момент угловая скорость
платформы равна ω.
Изобразим внешние силы: силы тяжести
![]()
![]() ,
и реакции подши-пников
,
и реакции подши-пников
![]() .
Все они или параллельны оси вращения,
или пересекают ее, следовательно, их
моменты относительно этой оси равны
нулю. Поэтому проведем ось z
вдоль оси
вращения платформы и составим уравнение
теоремы об изменении кинетического
момента системы в проекциях на эту
ось:
.
Все они или параллельны оси вращения,
или пересекают ее, следовательно, их
моменты относительно этой оси равны
нулю. Поэтому проведем ось z
вдоль оси
вращения платформы и составим уравнение
теоремы об изменении кинетического
момента системы в проекциях на эту
ось:
![]()
 =
0,
=
0,
т. е. выполняется закон сохранения кинетического момента системы относительно оси z, поэтому
Lz = Lz0,
и задача сводится к подсчету кинетического момента в началь-ный момент и в момент, когда точка К достигла точки В хорды
Рис. 442 АВ.
Так как система состоит из двух тел, то ее кинетический момент относительно оси z равен сумме кинетических моментов платформы и точки:
Lz точ =Lz пл + lz точ.
При подсчете кинетические моментов следует помнить, что в их выражения входят абсолютные скорости. Относи-тельная скорость точки К нам задана: vr = 4 м/с, а переносная — скорость точки В платформы — равна ve= ωr. Поэтому
lz точ = т2vrr cos 30˚ + m2ωr2..
Для платформы кинетический момент определяется как для твердого тела относительно его оси вращения:
![]() .
.
Тогда
![]() .
.
В начальный момент точка К относительно платформы не двигалась, т. е. vr0 = 0, поэтому
![]() .
.
Приравнивая значения кинетических моментов системы для двух положений точки К получаем
![]() =
=![]() ,
,
откуда
![]() рад/с.
рад/с.
П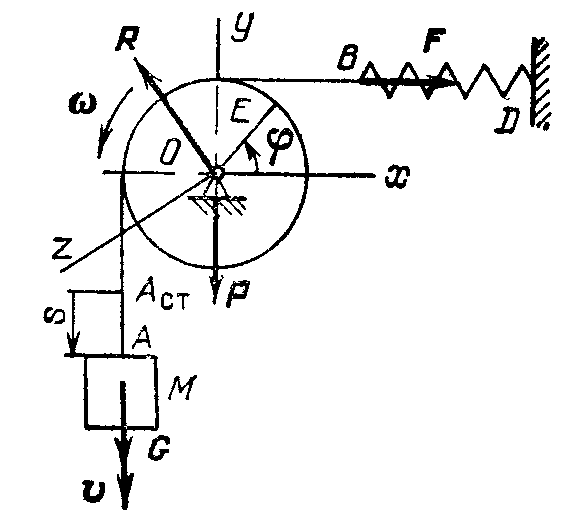 ример
2 Однородный
блок Е
массой т1
и радиусом r
может
вращаться вокруг горизонтальной оси
Оz
(рис 443). Через
блок перекинута гибкая нерастяжимая
нить на конце А
кото-рой подвешен груз М
массой т2,
а конец
В
прикреплен к пружине BD
жесткостью с.
Конец D
пружины закреплен неподвижно. Найти
закон движения груза М,
если в началь-ный момент он находился
в положении статического равновесия
и имел скорость v0
направленную вертикально вниз.
Трением и проскаль-зыванием нити по
блоку пренебречь.
ример
2 Однородный
блок Е
массой т1
и радиусом r
может
вращаться вокруг горизонтальной оси
Оz
(рис 443). Через
блок перекинута гибкая нерастяжимая
нить на конце А
кото-рой подвешен груз М
массой т2,
а конец
В
прикреплен к пружине BD
жесткостью с.
Конец D
пружины закреплен неподвижно. Найти
закон движения груза М,
если в началь-ный момент он находился
в положении статического равновесия
и имел скорость v0
направленную вертикально вниз.
Трением и проскаль-зыванием нити по
блоку пренебречь.
Решение. Изобразим систему, состоящею из блока и груза, в произвольный момент времени. Изобразим на схеме действующие на систему внешние силы силы тяжести
Рис.
443
![]() ,
,
,
,
силу упругости пружины и реакцию оси блока , неизвест-ную ни по модулю, ни по направлению Положение блока определяется его углом поворота φ а положение груза – координатой s. Проскальзывание нити по блоку отсутствует и поэтому φr = s. Выберем начало отсчета φ и s в положении статического равновесия системы. В этом положении пружина уже имеет деформацию равную δст . Поэтому для изобра-женного на схеме положения деформация пружины равна δ = δст+ s, а сила упругости пружины F = cδ = c(δст + s).
Для данной системы нельзя провести ось, относительно которой сумма моментов внешних сил равна нулю. Оси, расположенные в плоскости чертежа, рассматривать нельзя, так как относительно их и кинетический момент системы тождественно равен нулю. Поэтому для исключения из рассмотрения неизвестной реакции оси блока составим уравнение теоремы об изменении кинетического момента системы в проекции на эту ось.
![]() ,
,
(здесь мы использовали равенство Fст = с δст = Q).
Определим для рассматриваемого положения системы ее кинетический момент
Lz = LzM + LzE
тело М движется поступательно, поэтому его кинетический момент относительно оси Оz равен моменту его количества движения относительно точки О:
LzM = m2vr, а кинетический момент блока относительно его оси вращения равен произведению его момента инерции относительно этой оси на угловую скорость
LzE = Jzω = m1r2ω/2 = m1r v/2 (здесь мы использовали равенство ω = v/r). Итак,
![]() .
.
Подставив это выражение в формулу теоремы, получим
![]() .
.
Поскольку
![]() ,
а
,
а
![]() то, перенеся все слагаемые в левую часть
и разделив на коэффициент , стоящий
перед
то, перенеся все слагаемые в левую часть
и разделив на коэффициент , стоящий
перед
![]() ,
получим
,
получим
![]() .
.
Положим 2с/(2m2+ m1)= k2, тогда уравнение, описываю-щее движение тела М, примет вид дифференциального уравнения гармонических колебаний
![]() ,
,
решением которого является
s = C1cos kt + C2sin kt.
Определив
предварительно
![]() ,
по начальным условиям (t
= 0, s0
= 0,
,
по начальным условиям (t
= 0, s0
= 0,
![]() = v0)
найдем постоянные C1и
С2.
= v0)
найдем постоянные C1и
С2.
= - C1k sin kt + C2k cos kt, s0 = 0 = C1, = v0 = C2k.
Тогда C1= 0, C2 = v0/k, и закон движения груза М принимает вид
![]() .
.
П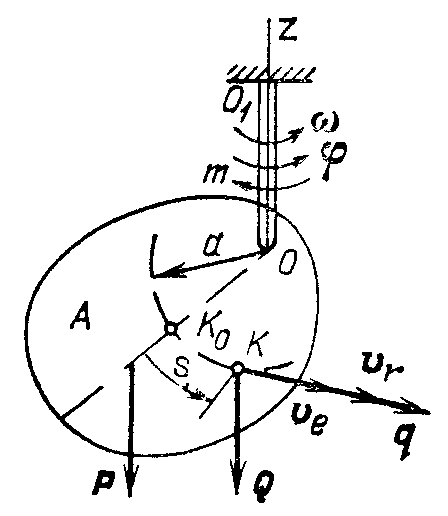 ример
3. Горизонтальная
платформа A
массой т1
= 9 кг закреплена
на упругом стержне ОО1
(рис. 444) и может совер-шать крутильные
колебания вокруг вертикальной оси ОО1,
относительно которой радиус инерции
платформы равен ρ.
По платформе
на
неизменном
расстоянии а
от точки О
движется материальная точка К
массой т2
= т
так что
ример
3. Горизонтальная
платформа A
массой т1
= 9 кг закреплена
на упругом стержне ОО1
(рис. 444) и может совер-шать крутильные
колебания вокруг вертикальной оси ОО1,
относительно которой радиус инерции
платформы равен ρ.
По платформе
на
неизменном
расстоянии а
от точки О
движется материальная точка К
массой т2
= т
так что
К0К = s = 0,27 a sin pt.
Найти вынужденные колеба-ния платформы, если жесткость стержня ОО1 при кручении равна
с
= amg,
ρ
= а,
р
=![]() .
.
Решение. Если мы повернем платформу на угол φ вокруг оси ОО1, то на нее со стороны упру-гого стержня будет действовать пара сил с моментом М = сφ, стремящимся вернуть платформу в
Рис. 444 исходное положение, при котором стержень ОО1 не деформирован, т. е. не закручен. Таким обра-зом, внешними силами, действующими на рассматриваемую систему, состоящую из платформы А и точки К, являются силы тяжести Р = 9тg, Q = тg и реакция упругого стержня (произвольно направленные силы и момент). Так как основное тело — платформа — совершает вращательное движение вокруг оси ОО1,
для решения задачи применим теорему об изменении кинетического момента системы относительно этой оси, кото-рую обозначим Oz. Тогда в правую часть уравнения войдет только составляющая М реактивного момента, направленная противоположно углу поворота платформы: таким образом,
![]() .
.
Определим кинетический момент системы для ее текущего положения:
Lz
= LzА
+ LzK
= Jzω
+ Mz(m2![]() ),
),
где
![]() —
абсолютная скорость точки К,
—
абсолютная скорость точки К,
ve — переносная скорость точки К,
vr = s = 0,27 ap cos pt —относительная скорость точки К. Из чертежа видно, что vе и vr направлены вдоль одной прямой в одну и ту же сторону, поэтому
vа = ve+ vr == ωа + 0,27ар cos pt.
Следовательно,
Mz(m2 ) = m2vaa = m2(ω+ 0,27р cos pt)a2,
Lz = m1ρ2ω + m2(ω + 0,27p cos pt)a2.
Подставив последнее выражение в формулу теоремы, получим
![]() ,
,
или
 .
.
Введем обозначения:
![]() ,
,
![]() .
.
Тогда уравнение движения платформы имеет вид
![]() .
.
Это дифференциальное уравнение вынужденных колебаний; его частное решение, определяющее вынужденные колебания при отсутствии резонанса (k ≠ p) запишется так:
![]() .
.
В этой задаче мы опять встретились со случаем кинематического возбуждения колебаний.
Задачи
3.4.23. Материальная точка массой 0,5 кг движется в плоскости согласно уравнениям х = 2 t, y = 4 t. Опреде-лить момент равнодействующей всех приложенных к этой точке сил относительно начала координат в момент времени t = 1 с. (8)
3.4.24. Материальная
точка массой 0,5 кг движется по закону
![]() .
Определить момент равнодей-ствующей
всех приложенных к этой точке сил
относи-тельно начала координат. (8)
.
Определить момент равнодей-ствующей
всех приложенных к этой точке сил
относи-тельно начала координат. (8)
3.4.25. Материальная
точка массой 1 кг движется по закону
![]() .
Определить момент равно-действующей
вех приложенных к этой сил относительно
оси Ох в момент времени t
= 1 c. (6)
.
Определить момент равно-действующей
вех приложенных к этой сил относительно
оси Ох в момент времени t
= 1 c. (6)
3.4.26. Спортсмен, прыгая с трамплина в воду, делает в воздухе сальто. В момент отрыва от трамплина он сообщает себе угловую скорость ω0 = 1, 5 рад/с вокруг горизонтальной оси, проходящей через его центр масс. При этом момент инерции спортсмена относительно оси вращения J0 = 13,5 кг·м2. Определить угловую скорость спортсмена, когда он во время полета, поджимая руки и ноги, уменьшил момент инерции до J = 5,4 кг·м2. (3,75)
3.4.27. Внутренними силами системы (рис. 445) маховик 2 массой 20 кг, центральный момент инерции которого Jz1 = 1 кг·м2, раскручивается до относительной угловой скорости ωr = 40 рад/с. Определить угловую скорость ω держателя 1, если его момент инерции Jz = 4 кг·м2, размер l = 1 м. (1,6)
3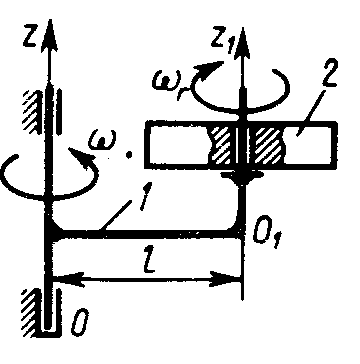
 .4.28.
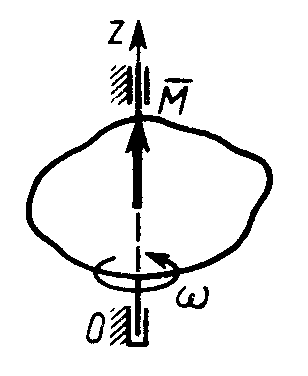
Тело вращается вокруг вертикальной оси
Оz (рис. 446) под
действием пары сил с моментом М =
16 t. Определить момент
инерции тела относительно оси Oz,
если известно, что в момент времени t
= 3 с угловая скорость ω = 2 рад/с.
При t = 0 тело находилось в покое. (36)
.4.28.
Тело вращается вокруг вертикальной оси
Оz (рис. 446) под
действием пары сил с моментом М =
16 t. Определить момент
инерции тела относительно оси Oz,
если известно, что в момент времени t
= 3 с угловая скорость ω = 2 рад/с.
При t = 0 тело находилось в покое. (36)
Рис. 445 Рис. 446 Рис. 447
3.4.29. Однородный стержень (рис. 447) массой m = 3 кг и длиной l = 1 м вращается вокруг вертикальной оси Oz с угловой скоростью ω0 = 24рад/с. К валу ОА прикладывается постоянный момент сил торможения. Определить модуль этого момента, если стержень останавливается через 4 с после начала торможения. (6)
3.4.30. Тело
вращается вокруг вертикальной оси Oz
под действием двух пар сил с моментами
![]() и
и
![]() .
Момент инерции тела относительно оси
Oz равен 3 кг·м2. Определить
угловую скорость тела в момент времени
t = 2 с, если в начальный момент
тело не вращалось. (6)
.
Момент инерции тела относительно оси
Oz равен 3 кг·м2. Определить
угловую скорость тела в момент времени
t = 2 с, если в начальный момент
тело не вращалось. (6)
3.4.31. Однородный диск радиуса r = 0,1 м и массой 5 кг (рис. 448) соединен с четырьмя стержнями длиной l = 0,5 м и массой 1 кг каждый. Система тел начинает вращаться под действием внешних сил с угловой скоростью ω = 3t. Определить момент внешних сил относительно оси Oz. (1,79)
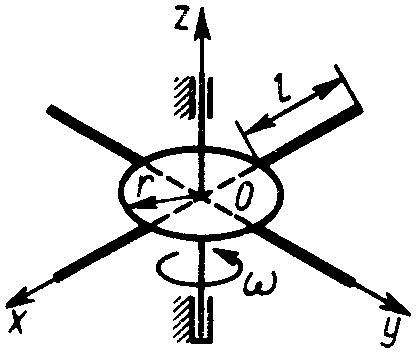
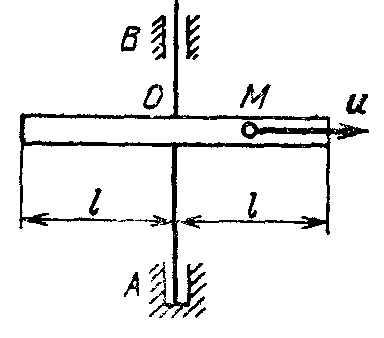
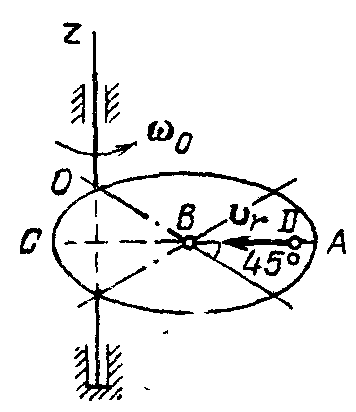
Рис. 448 Рис. 449 Рис. 450
3.4.32*. Круглая однородная горизонтальная плат-форма радиусом 1 м, массой 200 кг (рис. 449) вращается без трения вокруг вертикальной оси Oz с угловой скоро-стью ω = 2 рад/с. В точке А платформы находится тело D массой 50 кг, которое можно принять за материальную точку. В некоторый момент времени (t = 0) тело D начи-нает двигаться по платформе по диаметру AВС с посто-янной относительной скоростью vr = 2 м/с. Найти угло-вую скорость платформы в тот момент, когда тело находится в точке В платформы.
Ответ: ω1 = 2,9 рад/с.
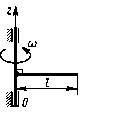
3.4.33*. Однородный
стержень массой m1
(рис. 450) вращается вокруг оси АВ
с угловой скоростью ω0. По
прямой ОМ движется материальная
точка массой т2, с постоянной
относительной скоростью
![]() .
Пренебрегая трением в подшипниках,
найти угловую скорость ω стержня
по истечении времени t
после выхода точки из центра О.
.
Пренебрегая трением в подшипниках,
найти угловую скорость ω стержня
по истечении времени t
после выхода точки из центра О.
Ответ:
![]() .
.
3.4.34*. Однородная круглая горизонтальная пласти-на массой 4 т (рис. 451) вращается вокруг вертикальной оси АВ, проходящей через центр О. По пластине на неизменном расстоянии r от оси вращения движется мате-риальная точка М массой т; закон относительного движения точки s = r sin (πt/2). Трением в подшипниках можно пренебречь, R = 2r. Найти угловую скорость и угловое ускорение пластины, если в начальный момент она была неподвижной.
Ответ:
![]()
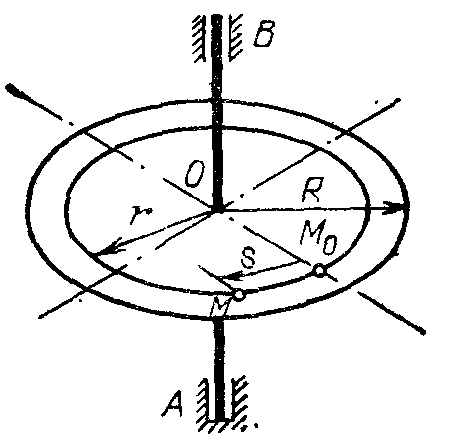
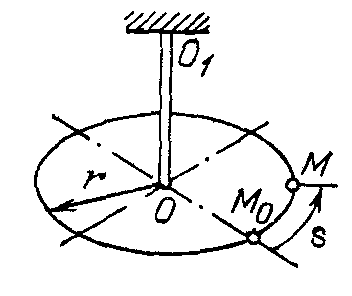
Рис. 451 Рис. 452
3.4.37*. Однородный диск массой m1 закреплен на упругом стержне OO1 (рис. 452) и может совершать крутильные колебания вокруг вертикальной оси. По ободу диска движется точка М массой т2 по закону
М0М = s = a sin ωt. Найти вынужденные колебания диска, если стержень закручивается на один радиан при статическом действии приложенной к концу О пары сил с моментом с; m1 = 1 кг, m2 = 0,4 кг, а = 1 см, r = 20 см, ω =14 рад/с, с = 80 Н·см/рад.
Ответ: φ = - 0,023 sin 14t.
3.4.35*. Груз А массой 10 кг прикреплен к тросу, намотанному на цилиндрический барабан В радиусом 20 см. Груз падает из состояния покоя в течение двух секунд, после чего к барабану прикладывается постоян-ный тормозящий момент М. Считая барабан однородным сплошным цилиндром, найти момент, обеспечивающий остановку груза в течение последующих четырех секунд.
Ответ: М = 29,4 Н·м.
3.4.36*. Вал В радиусом r приводится во вращение вокруг горизонтальной оси гирей А массой m1 подвешен-ной к свободному концу троса, намотанного на вал; масса вала m2, его радиус инерции ρ. Для стабилизации вращения к валу прикладывается тормозящий момент, пропорциональный его угловой скорости: М = kω. Найти угловую скорость ω вала, предполагая, что в начальный момент она равна нулю; массой троса пренебречь.
Ответ:
![]() ,
где J = m2ρ2
+ m1r2.
,
где J = m2ρ2
+ m1r2.