

Глава 16 основные типы сарп и характеристики их индикаторов
16.1. ОСНОВНЫЕ ХАРАКТЕРИСТИКИ РАЗЛИЧНЫХ ТИПОВ САРП
В настоящее время в эксплуатации находится большое многообразие типов САРП, которые выпускаются различными фирмами. Как пример можно привести отечественные АРП «Бриз-Е», «Панорама-1», а также РЛС/САРП «Океан-С», «Наяда-5М» (Россия), «Диджиплот» фирмы «Йотрон» (США), «Дата Бридж-7» фирмы «Норконтрол» (Норвегия), «КАС-1», «КАС-2» фирмы «Сперри» (США); САРП фирм «СТН-Атлас Електроник» (Германия), «Кельвин Хюз» (Англия) и много других. Несмотря на существующие отличия, все САРП имеют много общего. Типичные представители современных САРП объединяются с двухдиапазонными (3- и 10- см) судовыми РЛС (либо входят в их состав), с лагами различных типов, с электронным и обычным ГК, магнитным компасом с дистанционной передачей показаний. В памяти многих типов САРП имеется картографическая информация, по которой на экране дисплея САРП могут воспроизводиться упрощенные электронные карты.
Основными тактико-техническими характеристиками САРП являются:
максимальная дальность радиолокационного обзора, которая зависит от используемой РЛС;
максимальное количество автосопровождаемых целей (в различных типах САРП может составлять от 10 до 120);
максимальная дальность захвата целей на автосопровождение (обычно лежит в диапазоне от 15 до 25 миль для среднетоннажных и крупнотоннажных судов);
минимальная дальность захвата целей на автосопровождение (для различных типов САРП может составлять 0,15 – 0,4 мили);
минимальная дальность автосопровождения (может лежать в пределах 0,1 – 0,3 мили);
время с момента захвата цели до момента появления вектора скорости цели (для различных типов САРП может составлять от 30 сек. до 1 мин.;
время с момента захвата цели до момента выработки элементов движения цели с номинальной точностью (время переходного процесса фильтрации отметок целей). Данная характеристика может составлять от 2 до 3 мин.
Для сравнения в табл 16.1 приведены основные эксплуатационные характеристики и технические параметры различных типов САРП, находящихся в эксплуатации.
Табл. 16.1
Параметр |
«Бриз-Е» |
«Океан-С» |
«JOTRON» США |
«CAS-II Sperry» США |
«Norcontrol» Норвегия |
Диаметр экрана
Метод захвата целей: Р – ручной; А – автоматический; ОА – ограниченный автоматический
Максимальное число автосопровождаемых целей
Шкалы, на которых решается задача предупреждения столкновений, мили
Максимальная дальность автосопровождения, мили
Наличие режима истинного движения
Возможность имитации манёвра изменением курса (К), скорости (С)
Точность определения курса цели, градусы
Точность определения скорости цели, уз.
Точность определения DКР, мили
Точность определения ТКР, мин |
400
Р, ОА
20/20
4; 8; 16
16
Да
К
± 1
± 0,5
± 0,1
2,5 % от ТКР |
400
Р, А
57/57
1; 2; 4; 8; 16; 32
16
Да
К, С
± 3
± 1
± 0,25
± 1
|
406
Р, А
200/60
3; 6; 12; 24
17
Нет
К, С
± 3
± 1
± 0,1
± 0,5
|
406
Р, А
20/20
1,5; 3; 6; 12; 24
36
Нет
К
± 3
± 1
± 0,1
± 0,5
|
406
Р, А
50/20
0,5; 0,75; 1,5; 3; 6; 12; 24; 48
24
Да
К, С
± 3
± 1
± 0,1
0,5 % от ТКР |
Бурное развитие науки и техники привело к созданию абсолютно нового стиля и дизайна новых автоматизированных РЛС, совмещенных с функцией САРП. Это дало возможность по новому взглянуть на морскую технику 21 века. Прежде всего-это, удобство в установке, так как все составные части таких автоматизированных РЛС могут быть размещены как в одном месте, так и разнесены по разным местам. Плоские панели управления, которые отличаются высоким дизайном, могут быть размещены в любом удобном для оператора месте. Жидкокристаллические цветные мониторы морского исполнения с различными эффективными диаметрами и высоким разрешением дают четкую яркую картину окружающей обстановки, которую можно наблюдать на большом удалении от него. Современные САРП позволяют:
отображать радиолокационное изображение окружающей обстановки, электронную карту, цифробуквенную и графическую информацию, диалоговые окна, меню, кнопки управления;
осуществлять автоматическое сопровождение до 200 целей с индикацией параметров движения целей и параметров сближения с предупреждением об опасности столкновения и имитацией маневров на расхождение;
обеспечивать документирование информации на магнитном носителе и выполнять другие функции в соответствии с требованиями ИМО;
выводить данные САПР в систему отображения морских электронных карт, что позволяет осуществлять контроль плавания по маршруту;
осуществлять автообнаружение и сигнализацию о нахождении или выходе целей в двух охранных зонах.
Особенности работы режимов современных САРП рассмотрим на примере автоматизированных РЛС типа «Furuno»; «Simrad»; «Litton Bridge Master» фирмы «Decca».
Как было отмечено ранее, в современных радарах помимо решения основных задач — обнаружения и определения координат целей — имеется целый набор функций, существенно расширяющих их возможности. Такие РЛС/САРП разработаны для применения на судах прибрежного плавания, рыболовецких судах, больших яхт, грузовых и пассажирских судах, быстроходных судах, а также для любых применений, где требуются радары высокого разрешения с высокой скоростью сканирования. Информация отображается на цветной электронно-лучевой трубке либо на цветном дисплее, обеспечивающих нормальную читаемость изображения при освещении рабочего места оператора дневным светом.
Р ЛС/САРП
FURUNO FAR-2817/2827/2837S.
ЛС/САРП
FURUNO FAR-2817/2827/2837S.
Данная модель отличается про-грессивной обработкой эхосигнала для улучшения обнаружения целей при неблагоприятных погодных ус-ловиях. Применение LCD-дисплея обеспечивает четкое изображение ра-дарной картинки
Р
Рис. 16.1 Внешний вид РЛС/САРП FURUNO
FAR-2817
Обеспечивается автоматическое ото-бражение/слежение за 100 целями,
выбранными автоматически или вручную, а также отображение до 1000 целей с АИС. Данная модель отличается удобным управлением с помощью настраиваемых функциональных клавиш, трэкбола и поворотных рукояток.
LCD-дисплей с диагональю 23,1" обеспечивает эффективный диаметр изображения более 340 мм. Пользователь может выбирать цвет фона картинки радара, показанной на мониторе, что гарантирует отличную видимость при любой освещенности. Отметки, символы и текст могут быть представлены на экране различными цветами.
Для обнаружения целей используются современные технологии обработки сигнала. Пользователь может задать две охранные зоны, расположенные на заданном расстоянии в любом секторе. Перемещения других судов оцениваются с помощью специализированного программного обеспечения и оповещений CPA/TCPA. При подключении АИС-транспондера на экране радара серии FAR-2817 отображаются суда, оборудованные АИС.
РЛС может поставляться с антенной для 3- и 10- см диапазона излучения радиоволн (X- и S-band). Скорость вращения радаров X-band составляет 24 об./мин. у стандартных радаров или 42 об./мин. у HSC систем. Радар S-band обеспечивает хорошие показатели обнаружения целей при неблагоприятных погодных условиях, в то время как работа радаров X-band сильно зависит от помех от моря или дождя.
Радары могут быть связаны в локальную сеть для воспроизведения различных вариантов отображения обстановки. В соответствии с требованиями Главы V международной Конвенции SOLAS-74 суда водоизмещением 3000 р.т и более должны оборудоваться радарами, излучающими импульсы в 3- и 10-сантиметровом диапазонах. Каждый из радаров X- и S-band может быть задействован без использования дополнительного оборудования. Поэтому на любом из радаров в сети можно получить необходимую навигационную информацию, в том числе электронные карты, координаты, путевой угол, путевую скорость и т.д.
Характеристики дисплея и видеопрокладчика показаны в табл. 16.2
Табл. 16.2
Экран: Эффективный диаметр дисплея: Цвет эхосигнала: |
23,1" LCD 340 мм желтый, зеленый или белый, 32 уровня |
Диапазоны шкал: |
0,125; 0,25; 0,5; 0,75; 1,5; 3; 6; 12; 24; 48; 96 мили |
Минимальная дальность: |
30 м на шкале 0,75 мили |
Разрешающая способность по дальности: |
30 м на шкале 0,75 мили |
Точность круга дальности: |
±0.2% |
Режимы дисплея: |
Ориентация изображения: по норду, по курсу, по пеленгу, по норду в истинном движении |
Видеопрокладчик:
Захват целей: |
100 целей |
Сопровождение целей: |
Автоматическое сопровождение всех целей в пределах 0,1-32 мили |
Охранные зоны: |
2 зоны шириной 0,5 мили |
Вектор скорости: |
Истинный или относительный 30 сек.; 1; 3; 6; 12; 15; 30 мин. |
Предыдущие позиции: |
последние 5 или 10 позиций в интервале 30 сек.; 1; 2; 3; 6 мин. |
Предупреждения: CPA ограничение: TCPA ограничение: |
0,2 – 10 мили 0 – 99 мин. |
Проигрывание маневра: |
Динамическое или статическое с выбором временной задержки |
Отображение информации АИС:
Символы целей: |
"Спящие", активные, опасные, выбранные, потерянные |
Число целей: |
макс. 1000 |
Индикация данных: |
Основные и расширенные |
РЛС/САРП Litton Bridge Master серии Е.
Р
Рис. 16.2.
Внешний вид дисплея
РЛС/САРП Litton
Bridge
Master
серии Е

Даже самые простые модели радаров BridgeMaster-E имеют мощную систему по-давления помех. Эта система позволяет уста-новить автоматический режим подавления
помех даже вблизи побережья, полностью исключая необходимость оперативной регулировки радарного изображения навигатором.
Радары BridgeMaster-E могут комплектоваться джойстиком или трекболом, а также специализированной дополнительной клавиатурой, обеспечивающей альтернативное управление основными функциями радара. В некоторых конфигурациях радара панель управления может устанавливаться отдельно, в наиболее удобном для навигатора месте. Различные варианты конфигураций позволяют встроить радар в интегрированный мостик.
Радары BridgeMaster-E ARPA и ATA могут отслеживать одновременно до 40 целей с относительными скоростями до 150 узлов. Захват целей можно произвести как в ручном, так и в автоматическом режимах, выстраивая многоугольные и кольцевые охранные зоны и сектора. Навигатор может отобразить все данные о захваченной цели или параметры СРА/ТСРА шести выбранных целей. Базовая модификация ЕРА имеет возможность отображать до 10 вручную захваченных целей одновременно.
Изображение на экране радара состоит из нескольких слоев, позволяющих навигатору выбирать ту информацию, которая ему необходима. Используемые цвета и символы являются стандартными, в том числе и для ECDIS. Построение изображений может осуществляться собственными средствами управления радаром или можно получать изображения, созданные системой электронной картографии. ECDIS и радар могут быть частью интегрированного мостика или быть связанными друг с другом через NMEA-интерфейс.
Радары BridgeMaster-E принимают все данные о навигационной обстановке непосредственно от навигационных приборов или от электронной картографической системы. Кроме положения собственного судна, его широты и долготы, радар способен показывать пройденный путь, обеспечивая навигатора информацией об отклонении судна от курса. Количество точек отображаемого пути зависит от типа навигационного датчика. С датчиком производства Litton Marine Systems радар покажет 5 предыдущих путевых точек вместе с последней, шестой, точкой.
Дисплей BridgeMaster-E 250 EPA. Дисплей BridgeMaster-E 340 EPA.


Рис. 16.3.
Внешний вид дисплея
РЛС/САРП
BridgeMaster-E
250 EPA
Рис 16.4.
Внешний вид дисплея РЛС/САРП
BridgeMaster-E
340 EPA
Основные характеристики дисплея BridgeMaster-E 250 EPA.:
настольное и консольное исполнение; высокая разрешающая способность; размер изображения – 250 мм; вес – 48 кг, прибор контроля излучения; управление трекболом; дополнительная панель управления; функция ATA; функция ARPA; видеопроцессор.
Основные характеристики дисплея BridgeMaster-E 340 EPA:
консольное исполнение; средняя разрешающая способность; размер изображения – 340 мм; вес – 205 кг; прибор контроля излучения; управление трекболом; дополнительная панель управления; функция ATA; функция ARPA; видеопроцессор.
РЛС/АТА Simrad RA-40/41/42.



Рис. 16.5. Внешний
вид и отображение информации в РЛС/АТА
Simrad RA-40/41/42 в режиме
двух дисплеев
Данные усовершенствованные модели предназначаются для установки на малых судах и поставляются на основе нового поколения дисплеев, изготовленных по тонкопленочной технологии и обеспечивающих чистое и отчётливое изображение с возможностью работы в режиме двух дисплеев на одном экране. Для них характерны следующие режимы работы:
Двухдистанционный режим - вывод радиолокационной картинки ближней и дальней дистанции. Обе части имеют плавную настройку шкалы диапазонов, что делает возможным точную установку требуемого расстояния без предварительно заданных значений шкалы диапазонов.
Ночной режим - режим измененной цветовой гаммы.
Высокая частота обновления - использование антенн с высокой скоростью вращения, возможность использования на высокоскоростных судах.
Полу-трёхмерный режим - возможность произвести разделение между слабыми и сильными эхосигналами.
Перемещающиеся Электронные линии пеленга (EBL) / регулируемый маркер дистанции (VRM), полноэкранный режим - возможность отображения картинки радара в режиме разделенного экрана, т.е. различные режимы обычного радара, а также трехмерного изображения.
Отражение следа - помогает определить направление движения цели относительно судна. Продолжительность отслеживания отражения следа может быть настроена от 15 секунд до 6 минут или включена в режим постоянного отслеживания.
Устройство автоматического отслеживания цели (ATA) – до 10 обозначенных оператором целей - ручной захват, автоматическое отслеживание. При захвате цели, радар автоматически предоставляет меню данных, которое включает в себя указание пеленга и дистанции, скорости и курса, точки наибольшего сближения и времени наибольшего сближения с отслеживаемой целью. Встроенная система сигнализации подает сигнал, если цель находится на курсе столкновения с судном, а также при потере цели, что упрощает навигацию и делает ее еще более безопасной.
Имеются такие режимы работы, как режим «по Курсу» (Head Up); режим «по Норду» (North Up); режим «Истинное движение, Курс вверх» (Course Up); режим «Истинное движение, Север вверх» (True Motion).
Автоплоттер ARP-10.
При необходимости радары, предназначенные для установки на малых судах, могут быть дооборудованы дополнительным блоком автоплоттера ARP-10, обеспечивающим автозахват 5 целей, и ручной захват 5 целей, либо ручной захват 10 целей. Все захваченные цели автоматически отслеживаются с выдачей расстояния и направления на выбранную оператором цель, её скорости и курса, точки наибольшего сближения (closest point of approach, CPA) и времени до достижения точки наибольшего приближения (time to CPA, TCPA). Использование данных функций значительно снижает нагрузку на оператора, обеспечивает повышение безопасности судовождения и упрощает работу с радаром. Для функционирования автоплоттера необходимы данные о собственном курсе судна в формате AD-10 и данные о скорости судна с внешних датчиков. Автоплоттер совместим только с 24 об/мин антенной.
!6.2. УПРАВЛЕНИЕ РАБОТОЙ САРП
Управление работой САРП осуществляется с помощью различных органов: переключателей, кнопок, фиксаторов, клавиш. Параметры управления САРП разделяются на текстовые и числовые. Среди этих двух типов могут быть выделены бинарные, которые имеют только два значения. Выбор значения параметра выполняется разными способами: установкой переключателя на необходимое значение; наведение с помощью клавиш «ВПРАВО» и «ВЛЕВО» («ВВЕРХ», «ВНИЗ») на необходимые значения параметра маркера и нажатием клавиши «ВВОД» (Enter); набором номера или первой литеры параметра и нажатием клавиши «ВВОД» (Enter); набором числового значения цифрового параметра или другими способами. Условно параметры управления работы САРП можно разделить на следующие группы.
Район и его ориентация:
МИЛИ (ШКАЛЫ) – переключение шкал дальности (Range), тип числовой;
СМЕЩЕНИЕ ЦЕНТРА – смещение центра развертки (Set Centre);
ВОЗВРАТ ЦЕНТРА – возврат центра развертки в начальное положение (Reset Centre);
ОРИЕНТАЦИЯ – ориентация изображения(Bearing – selection of bearing presentation mode), тип текстовый. Значение текстового параметра:
НОРД – ориентация по меридиану (North Up);
КУРС – ориентация по курсу (Head Up);
КУРС СТАБ – ориентация по стабилизированному курсу (Course Up).
Качество изображения:
ЯРКОСТЬ – яркость элементов изображения (Brill – brilliance), тип текстовый. Значение навигационного параметра:
НКД – неподвижные круги дальности (Range Ring – fixed range rings), тип числовой;
ПКД – подвижные круги дальности (VRM – variable rings), тип числовой;
СИМВОЛЫ – символы, изображаемые на экране(Symbols), тип числовой;
ИНФ. ПЕРВ. – первичная РЛ-информация (CRT – cathode ray tube), тип числовой;
МАРКЕР – маркер (Marker), тип числовой;
ШКАЛА – подсветка шкалы пеленга (Scale), тип числовой;
КАРТА – изображение карты (Chart), тип числовой;
УСИЛЕНИЕ – усиление видеосигнала (Gain – receiver sensitivity adjustment), тип числовой;
ВОЛНЕНИЕ – подавление помех от моря (Sea – sea clutter suppression), тип [Вкл/откл]+ числовой;
ДОЖДЬ – подавление помех от дождя (Rain – rain clutter suppression), тип [Вкл/откл]+ числовой;
Режимы движения и индикации.
ИСТ/ОТН – режим движения (True/rel or Motion – true/relative mode of motion), тип текстовый бинарный;
ИСТ – режим истинного движения (True Motion), может быть относительно воды (Sea) или грунта (Ground);
ОТН – режим относительного движения;
ВЕКТОРЫ (ЛИД/ЛОД) – вид индикации перемещения (V True/V Relor or Vector), тип текстовый бинарный;
ЛИД – истинный вектор (True Vector);
ЛОД – относительный вектор (Relative Vector);
Режим автосопровождения.
АВ – режим автоматического обнаружения целей и автозахвата (Auto Mode), тип [Вкл/откл];
ЗАХВАТ – ручной захват целей на автосопровождение (Acquire), тип текстовый. Значение текстового параметра:
Ц – цели (Trg – target);
ТО – неподвижный точечный ориентир (F – fixed point);
ПО – протяженный объект;
ОЦ – опорная цель, относительно которой вычисляются параметры сближения с какой либо другой целью (Rt – reference target);
ОТ – опорная точка, относительно которой вычисляются дистанция и пеленг координатного маркера (RP – reference point);
СБРОС АС – сброс цели с автосопровождения, отмеченной координатным маркером (Release Target);
ЗОНА ПОИСКА – параметры зоны поиска (Auto Param – automode parameters), тип текстовый. Конфигурация зоны в различных типах САРП может быть различной. Когда поиск проводится в носовом секторе, то значения данного параметра следующие:
Макс. Д – расстояние до границы зоны поиска по курсу (F Rng L – forward range limit), тип числовой;
СЕКТОР П – сектор поиска (Sector), тип числовой. Обычно характеризуется половиной своего значения и рассчитывается от ДП судна до правой или левой границы сектора.
ЛИНИИ – режим построения линий запрета захвата (Barrier), тип [Вкл/откл].
Для оценки ситуации.
ЗОНА БЕЗОПАСНОСТИ – параметры зоны безопасности (Safe Limit), тип текстовый. Значения текстового параметра:
ДКРЗ – минимальная дистанция до точки кратчайшего сближения (CPA – closest point of approuch), тип числовой;
ТКРЗ – время до точки кратчайшего сближения (TCPA time to closest point of approuch);
ТПР – время экстраполяции движения целей – длина векторов (Vector Length), тип числовой;
ОХР. КОЛЬЦО – включение показания зоны охранного кольца (Guard Ring), тип [Вкл/откл];
СОК – сектор опасных курсов – (sector of dangerous courses), тип [Вкл/откл];
СЛЕДЫ – следы целей (Track History), тип [Вкл/откл];
ФОРМУЛЯР – данные о положении цели относительно нашего судна и ее элементов движения (Target Data), тип [Вкл/откл]. Обычно в формуляре отображаются следующие значения:
ЦЕЛЬ – номер цели (Tgt – target);
П – пеленг цели (TBRG – target bearing);
Д – дистанция до цели (TRNG – target range);
К – курс цели (THDG – target heading);
V – скорость цели (TSPD – target speed);
ДКР – дистанция до точки кратчайшего сближения (CPA – closest point of approach);
ТКР – время до точки кратчайшего сближения (TCPA – time to closest point of approach);
ВИЗИР – электронный визир для измерения пеленгов (EBL – electronic bearing line), тип [Вкл/откл],
НАЧ. ВИЗИРА – установка точки начала визира, (EBL – Footpoint), тип текстовый. Значение текстового параметра:
ЦЕНТР – начало визира в центре экрана (Center);
МАРКЕР – начало визирной линии в месте установки маркера (Indp. – display of EBL from trackball cursor mark independently).
Режим проигрывания маневра
ИМИТ. МАНЕВРОВ – режим проигрывания маневров (Trial trial manoeuvre), тип [Вкл/откл];
ТДПМ – время до начала маневра (TTV – time to manoeuvre), тип числовой;
ВИД МАН. – вид маневра (Manoeuvre Type), тип текстовый. Используются различные типы маневров в различных типах САРП.
Режим ввода/индикации данных
ВВОД ДАННЫХ – режим ввода начальных данных (Data – initial data input), тип [Вкл/откл];
ВИД ИНФ. – вид введенной информации, тип текстовый. Значения такого параметра обычно следующие:
ДАТА – дата: число/месяц/год (Date: D/m/y – day/month/year);
ВРЕМЯ – Ч: мин. [Г/П] – часы - минуты [Г – гринвичское, П - поясное] (Time H:M [G/L] – time, hour: minutes [Greenwich/Local];
СКОРОСТЬ СУДНА – ручной ввод скорости (HDGM – manual speed), тип числовой;
КУРС РУЧНОЙ – ручной ввод курса (HDGM – manual heading), тип числовой;
СИС. ПАРАМ. – режим отображения/ввода системных параметров (Sys. Param. – system parameters), тип текстовой;
Системные параметры характеризуют маневренные особенности судна и влияние на РЛ-информацию особенностей судна. У различных типов САРП перечень этих параметров различный. Для примера приведем один из возможных вариантов значений такого текстового параметра:
Угл. скорость угловая скорость поворота своего судна (Turn Rate), тип числовой;
dV – линейное ускорение своего судна при маневрировании скоростью (Speed Rate), тип числовой;
ТMAX – задержка в изменении курса судна, которая вызвана инерционностью судна, тип числовой;
ТЕНЬ. СЕКТОР – теневой сектор (Blind Sector), тип числовой. Рассчитывается от ДП судна в две стороны, его величина равняется двойному значению;
VMAX – максимальная скорость (Max SPD – maximum speed), тип числовой.
В современных типах САРП обычно используется звуковая и световая сигнализация при следующих ситуациях:
ОПАСНАЯ ЦЕЛЬ – (COLL WARN – collision warning);
СБРОС ЦЕЛИ – сброс цели с автосопровождения (LOST TRG – lost target);
НОВАЯ ЦЕЛЬ – появление новой цели (NEW TRG – new target);
НЕИСПРАВНОСТЬ – неисправность САРП (SYS WARN – system warning);
При эксплуатации САРП судоводителем важная роль отводится маркеру. Он используется при ручном захвате на автосопровождение и сбросе с него объектов (целей и ориентиров), вызове для индикации цифровых значений кинематических параметров отдельных сопровождающих объектов, установки дистанции охранного кольца, измерения пеленга и дистанции до объектов, задания опорной точки смещения центра развертки, построение пути, дополнительных точек и линий на ЭК, выполнение операций с объектами ЭК и проведения ряда других действий. Перемещение маркера по экрану задается либо четырьмя клавишами (перемещение вверх, вниз, вправо, влево), либо джойстиком (трекболом).
Установка (потенциометр) «Яркость» обычно позволяет устанавливать яркость некоторых компонентов изображения (первичной информации, НКД, ПКД, маркера, карты и т.д.).
Параметр DКР обычно задается в диапазоне от 0 до 5 миль с шагом 0,1 мили. Время кратчайшего сближения ТКР в одних САРП может устанавливаться в диапазоне 0-60, а других – 0-90 мин. с шагом обычно 1 мин. Время прогноза (экстраполяции) перемещения обычно выбирается в диапазоне от 0 до 60 мин. с шагом 1 мин.
Зона автоматического выявления и автозахвата целей на автосопровождение строится на экране дисплея с помощью вспомогательных линий или путем задания сектора с помощью электронного визира или другим способом. С помощью электронного визира задается и теневой сектор. Обычно новая цель автоматически берется на сопровождение при появлении ее отметки в двух или четырех обзорах подряд (при 2 или 3 последовательных оборотах антенны). Цель автоматически сбрасывается с автосопровождения, когда после получения последней ее отметки в целом числе последовательных обзоров (обычно от 6 до 10) ее отметка не обнаружилась.
След прошедшего перемещения может быть создан как у конкретной цели при наведении на нее маркера, так и у всех целей при включении режима отображения следов целей.
Совмещение РЛ-изображения с ЭК обычно достигается совмещением РЛ-изображения одного или нескольких неподвижных точечных ориентиров с их местоположением на карте.
САРП обычно имеют звуковую и световую сигнализацию при следующих ситуациях: появлении опасной цели; сближения с целью на заданную (охранную) дистанцию; при сбросе цели с автосопровождения; а в некоторых САРП при выявлении маневрирования цели и в других случаях.
Критерием опасной цели во всех видах САРП служит одновременное выполнение двух неравенств: ДКР ДКРЗ, 0 ТКР ТКРЗ.
Большое количество типов САРП имеют режим обучения оператора работе с РЛ-прокладчиком при выключенной РЛС путем моделирования различных ситуаций расхождения судов.
16.3 ОСОБЕННОСТИ САРП «БРИЗ-Е»
Основные эксплуатационные характеристики и технические параметры САРП «Бриз-Е» приведены в таблице 16.1.
САРП «Бриз-Е» имеет 10 модификаций. Применение определенной модификации на конкретном судне зависит от бортовой сети, а также имеющихся на борту датчиков курса и скорости. САРП «Бриз-Е» сопрягается с РЛС «Енисей-Р», «Океан-М», «Наяда-5», а также гирокомпасами типа «Курс», «Вега» и лагами ИЭЛ-2 (ИЭЛ-2М), МГЛ-25, и ЛГ-2.
Рассмотрим приборный состав САРП «Бриз-Е» при сопряжении его с навигационной РЛС «Енисей-Р» (рис. 16.6).
В состав РЛС «Енисей-Р» входят приборы: А – щелевые антенны диапазонов 3 и 10 см; ПЗ – приемопередатчик диапазона 3 см; П10 – приемопередатчик диапазона 10 см; К3 – контроля работоспособности диапазона 3 см; К10 – контроля работоспособности диапазона 10 см; КП – коммутации и помехозащиты; И – индикатор (2 комплекта).
В состав САРП «Бриз-Е» входят приборы: 1БР51 – индикатор с вычислителем; 1БР71 – прибор питания; прибор сопряжения с навигационными датчиками 1БР91 в зависимости от комплектации.
Радиолокационная часть комплекса обеспечивает получение информации об окружающей обстановке в зоне действия РЛС.

САРП «Бриз-Е» на основе данных, поступающих от РЛС, лага и гирокомпаса с помощью вычислителя обеспечивает расчет траектории движения объектов, опознавание по заданному критерию опасных целей и прогнозирование ситуации при ручном проигрывании маневром своего судна и отображение информации на экране ЭЛТ.
Синхронная и синфазная работа САРП обеспечивается передачей по линии связи из прибора КП в прибор 1БР51 импульсов синхронизации и курсового угла поворота антенны.
Видеоимпульсы от приборов П3 и П10, а также сигналы после их совместной обработки в приборе КП поступают в индикатор ситуаций. Данные курса поступают на прибор 1БР51 через прибор сопряжения 1БР91, а на индикаторы И – непосредственно от гирокомпаса.
Данные скорости судна поступают от лага типа ИЭЛ-2 на все индикаторы через прибор КП. При сопряжении комплекса с лагами типов МГЛ-25 и ЛГ-2 данные поступают непосредственно на прибор 1БР91 и приборы И.
Индикатор комплекса обеспечивает:
отображение в масштабе 4 – 32 мили первичной радиолокационной обстановки;
автозахват и ручной ввод объектов на автосопровождение на дальностях от 1 до 16 миль;
автоматическое сопровождение до 20 надводных объектов на дальностях 1 – 16 миль. Отображение прошлых положений сопровождаемых целей.
Индикатор обеспечивает отображение на экране следующей вторичной информации:
символов сопровождения объектов в виде колец;
векторов относительного или истинного движения сопровождаемых объектов с дискретностью по углу 0,7° и длине 3мм;
маркера с ошибкой по положению не более 4 мм;
первичной метки курса с ошибкой не более ±15 и вторичной метки курса с дискретностью по углу 40;
цифрового формуляра выбранного сопровождаемого объекта, состоящего из пеленга П, дальности D, курса К, скорости V, расстояния кратчайшего сближения DКР и времени кратчайшего сближения ТКР;
курса и скорости своего судна;
времени прогноза движения объектов их векторами ТПРОГН;
признаков опасного объекта, срыва сопровождения и недостоверности вектора.
В индикаторе предусмотрена возможность имитации маневра курсом путем отображения в 60 раз ускоренного развития вторичной радиолокационной обстановки на прямолинейном участке и в 5 раз на циркуляции.
Индикатор обеспечивает ориентацию радиолокационного изображения относительно истинного меридиана или стабилизированного курса судна. Предусмотрен также ручной ввод скорости и динамических характеристик судна. Индикатор выдает звуковую и световую сигнализацию о возникновении опасных ситуаций, срыва сопровождения, истечении времени до начала манёвра и отказе аппаратуры.
По функциональному назначению автоматизированный индикатор ситуаций (АИС) содержит следующие основные каналы и блоки: канал синхронизации КС; информационно-вычислительный канал ИВК; канал управления и контроля КУК; канал разверток КР; канал отработки пеленга антенны КОПА; канал видеосигналов КВС; блок ЭЛТ (рис. 16.7).
КС вырабатывает тактирующие и управляющие сигналы для синхронизации ИВК и КР в реальном масштабе времени. Из КС в блок ЭЛТ поступают импульсы подсвета вторичной радиолокационной информации при её отражении на экране.
КВС обеспечивает усиление видеоимпульсов, смешивание его с импульсами меток дальности, курсовой метки и других служебных меток, которые затем поступают в блок ЭЛТ для отображения. В КВС также осуществляется бинарное квантование радиолокационного сигнала для подачи его в информационно-вычислительный канал. Здесь же производится цифровая регулировка усиления сигнала в стробе дальности.


ИВК состоит из специализированной вычислительной машины, устройства связи с системой, устройства кодирования и имитатора. ЦВМ обеспечивает арифметическую и логическую обработку информации, обмен информации с абонентами системы во время выполнения команд ввода и вывода и др., устройство связи с системой – обмен информацией между датчиками, приёмниками информации и ЦВМ по кодовым шинам. Кодирующее устройство по команде из ЦВМ формирует строб дальности и его границы, квантует по дальности видеосигнал в пределах строба дальности и др. Имитатор формирует и выдаёт на выход видеосигнал контрольного объекта по командам из ЦВМ.
КР вырабатывает: сигналы для создания радиально-круговой развёртки, которая позволяет отображать на экране ЭЛТ первичную радиолокационную информацию; сигналы для создания координатной развертки, позволяющей отображать на экране ЭЛТ вторичную радиолокационную информацию. Первичная и вторичная радиолокационная информация совмещается с ошибкой не более 4 мм. КР состоит из тракта формирования радиально-круговой и координатной развёрток. КОПА осуществляет дистанционную передачу углового положения антенны, разложение развёртки дальности по координатам X и Y, отрабатывает угол ориентации координат по данным ЦВМ, формирует импульсы метки курса и нуля пеленга антенны.
Канал управления и контроля КУК предназначен для управления работой индикатора и ЦВМ, для контроля аппаратуры и проверки контрольных сигналов, для формирования управляющих слов и выдачи их по кодовым шинам в ЦВМ, а также для приема по кодовым шинам из ЦВМ слов управления и формирования из них сигналов индикации.
На экране блока ЭЛТ отображается первичная и вторичная радиолокационная информация. Здесь же находятся каскады и органы управления, обеспечивающие работу ЭЛТ.
САРП «Бриз-Е» соответствует требованиям Резолюции IMO А 422 (XI).
16.4 ОСОБЕННОСТИ САРП «ОКЕАН-С»
Основные технические и эксплуатационные параметры САРП «Океан-С» приведены в табл. 16.1.
В САРП «Океан-С» в одном индикаторе объединены функции навигационного индикатора и САРП. Этим выполняются требования Резолюции А 422 (XI) IMO, предусматривающей возложение на САРП всех функций индикатора РЛС с обязательным отображением первичных видеосигналов. Такое объединение предопределило 2 режима работы САРП «Океан-С»: основной, т.е. режим стандартного навигационного использования, и режим САРП.
Станция может состоять из однодиапазонных комплектаций 3- и 10-сантиметрового диапазонов, а также может представлять двухдиапазонную комплектацию с раздельными антеннами и двумя идентичными индикаторами. Последняя комплектация позволяет получать комбинацию из двух одинаковых РЛС с возможностью взаимного переключения индикаторов, что соответствует поправкам к правилу 12 и Протокола-78 по установке двух независимых РЛС на судах валовой вместимостью 10 тыс. рег. т и более.
В станции реализовано электропитание РЛС с помощью рассредоточенных в местах потребителей выпрямителей (отсутствуют электромашинные и статические преобразователи). В ней предусмотрено наличие специальных ответчиков, работающих на фиксированных частотах 9310 и 2910 МГц. Излучаемая мощность контролируется с помощью устанавливаемого вблизи антенны прибора контроля, содержащего чувствительный к СВЧ-излучению транзистор с цепями усиления и задержки. В индикаторе применены сенсорные переключатели для переключения, ввода и вывода информации.
Координаты целей можно измерять с помощью координатного маркера, который управляется кнюпеллем, расстояния и пеленги – между любыми двумя точками экрана. На крупномасштабных шкалах отображаемая информация имеет большую яркость.
САРП «Океан-С» имеет и другие особенности.
Р ассмотрим
функциональную схему РЛС «Океан-С» (рис
16.8) и назначение отдельных блоков и
узлов.
ассмотрим
функциональную схему РЛС «Океан-С» (рис
16.8) и назначение отдельных блоков и
узлов.
Рис. 16.8. Упрощенная функциональная
схема САРП «Океан-С»
Главный источник информации, на основе переработки которой формируется изображение, – приёмопередатчик П3 (П10), который запускается стартимпульсами из индикатора. От приёмопередатчика в индикатор поступают видеосигналы целей ВС. Из блока антенны от датчика импульсов приращения угла поворота антенны (ДИП) поступают импульсы грубого, среднего и точного отсчётов угла поворота антенны (ГО QA, СО QA, ТО QA). От лага ЛГ и гирокомпаса ГК в ИКО поступает информация о курсе КС и скорости VC своего судна.
Индикатор состоит из следующих основных блоков и каналов.
Центральный процессор ЦП, представляющий собой специализированную ЦВМ, предназначен для приёма информации, её хранения, обработки и выдачи для отображения и сигнализации. ЦП включает в себя следующие блоки:
арифметического устройства с пультом контроля и управления; постоянной памяти; оперативной памяти; буферной памяти; преобразования сигналов.

Устройство квантования КВ и преобразования масштаба дальности ПМД квантует аналоговый видеосигнал по времени (дальности) на 400 элементов – квантов. Напряжение сигналов в каждом элементе дальности сравнивается с восемью уровнями порогового напряжения, т.е. по амплитуде сигнал квантуется на 8 уровней. После квантования сигнал шифруется трехразрядным двоичным кодом. Все дальнейшие операции производятся в двоичных кодах.
Масштаб дальности преобразуется следующим образом. Квантованные сигналы в виде кода записываются в сдвиговые регистры с частотой от 16 МГц (шкала 1 миля) до 0,5 МГц (шкала 64 мили) в период зондирования пространства. Считывание производится квантами считывания в виде пачки из 400 импульсов тактовой частоты 1 МГц (шкалы 1 – 8 мили) или 2 МГц (шкалы 16 – 32 мили).За счет разности времени записи и считывания преобразуется масштаб дальности на каждой шкале. Такой метод преобразования масштаба позволил обеспечить независимость скорости развёртки, которая на всех шкалах постоянна и составляет 1мм/мкс, и темпа работы ЦП от включенной шкалы дальности.
Квантованный сигнал в соответствующем масштабе КвВд поступает в канал преобразователя видео и подсвета ПВП, где с помощью цифровых аналоговых преобразователей из цифровой формы преобразуется в аналоговую, усиливается, смешивается с другими сигналами и подаётся в блок ЭЛТ. Устройство развёрток состоит из канала создания радиально-круговой развёртки цифровым методом и координатной развёртки. С помощью токов радиально-круговой развёртки, а также импульсов подсвета развёртки РЗВР, поступающих на модулятор ЭЛТ, сигналов НВД, импульсов подсвета линии курса ПсЛК, видеосигналов формируется видимое изображение круговой обстановки.
Координатная развёртка предназначена для отображения на экране ЭЛТ вторичной радиолокационной информации.
Устройство опознавания и классификации ОК используется для обнаружения отметок цели путём анализа связанности импульсов квантованного видеосигнала в смежных периодах зондирования, а также для разделения обнаруженных целей на точечные и протяжённые.
Устройство синхронизации предназначено для синхронизации работы всех блоков и устройств станции путём выработки и подачи управляющих и тактовых импульсов, а также для преобразования видеосигналов процессора в сигналы управления развёрток и табло.
Блок преобразователя сигналов ПС служит для создания прямоугольных координат X и Y точечных целей по результату анализа пачечной структуры квантованных сигналов.
Устройство преобразования курса и скорости ПКС преобразует курс и скорость собственного судна из аналоговой формы в цифровую в виде кода.
Пуль управления ПУ предназначен для ввода и вывода информации из ЦП и для управления работой станции. Он позволяет вести обмен информации между оператором и ЦП.
Координаты точечных целей с выхода блока ПС совместно с информацией от ДИП, лага и гирокомпаса и команд оператора с пульта управления используются для вторичной обработки радиолокационной информации во всех логических и арифметических операциях процессора.
Канал приращения угла поворота антенны ППА предназначен для выработки и выдачи информации о направлении луча антенны в пространство по данным импульсов ДИП.
Узел управления сигналами подсвета УСП объединяет поступающие на его вход сигналы НВД, подсвета развёртки РЗВР, линии курса ПсЛК, символов ПсСв, вектора ПсВк и др. и коммутирует сигналы для режимов «ОСНОВНОЙ, АРП». Усиливает объединённые сигналы усилитель платы преобразователя видео и подсвета ПВП.
На экране трубки отображается первичная и выработанная вторичная радиолокационная информация.
РЛС «Океан-С» отличается высокой степенью автоматизации обработки и отображения радиолокационной информации. Она удовлетворяет требованиям IMO как к судовым РЛС, так и к САРП.
16.5. ТРЕНАЖЕРНАЯ ПОДГОТОВКА СУДОВОДИТЕЛЕЙ МЕТОДАМ
ИСПОЛЬЗОВАНИЯ САРП
Правильное использование САРП судоводителями способствует адекватному пониманию радиолокационной информации, что, в свою очередь, дает возможность уменьшить риск столкновений и загрязнения морской среды.
Резолюциями IMO приняты международные требования и рекомендации к обучению методам использования САРП. В соответствии с этими требованиями капитаны и вахтенные помощники должны получить соответствующую подготовку, позволяющую понимать принципы работы САРП, правильно эксплуатировать, а также оценивать ограничения и возможности САРП.
Обязательная подготовка судоводителей основывается на минимальных требованиях по обучению методам использования САРП, приведённых в резолюциях IМО. К таким требованиям относится:
обязательное прохождение соответствующих курсов обучения по использованию САРП каждым капитаном, старшим помощником и помощником капитана, несущими ходовую вахту на судне, на котором установлено САРП (периодичность не менее 5 лет);
курс подготовки должен включать в себя обязательные материалы по программе обучения, приведенной в резолюции IМО;
технические средства обучения должны включать тренажеры и другую аппаратуру, позволяющую показать возможности, ограничения и ошибки САРП. Во введении к программе обучения приводятся требования по оснащению судов средствами навигационного оборудования;
средства обучения должны обеспечивать возможность проведения упражнений в реальном масштабе времени. При этом предусматривается, чтобы отображенная на индикаторе информация, по выбору обучаемого или по указанию инструктора, могла быть предоставлена либо в форме САРП, либо в основном формате РЛС. Такая гибкость представления информации позволяет проводить необходимые упражнения в широком диапазоне способов отображения данных и способствует закреплению навыков эффективного использования САРП и РЛС.
При подготовке основное внимания уделяется тренажерному обучению. Основной целью тренажерной подготовки судоводителей является овладение профессиональными знаниями, навыками и умениями, обеспечивающими безопасное судовождение в любых условиях плавания.
Содержание подготовки должно соответствовать основным компонентам судоводительской деятельности и отвечать требованиям международных и национальных документов по вопросам безопасности мореплавания. Поэтому развитие тренажерной техники, в частности создание радиолокационных тренажеров, является актуальной темой сегодняшнего дня. В настоящее время в мире существует достаточно большое количество фирм, выпускающих тренажеры для подготовки и обучения судоводителей методам использования САРП.
В качестве примера можно привести радиолокационный тренажёр норвежской фирмы NORCONTROL BRIDGE SIMULATORS. Аналогичный тренажёр установлен в Киевской государственной академии водного транспорта, который состоит из: пульта инструктора; мостиков активных судов (OS1, OS2, OS3); класса разбора; блоков питания и включения тренажёра (рис. 16.9) . Каждый мостик активного судна оборудован:
радиолокационной станцией «Bridge Master»;
пультом управления движением судна;
средством автоматической радиолокационной прокладки;
УКВ станцией;
специальной информационной панелью (OVER HEAD PANEL);
таблицами маневренных элементов всех моделей судов, существующих в тренажере.
В классе разбора установлены пульт инструктора, плоттер, принтер, видео - проекционная система и экран.
В
Рис. 16.10.
Дисплей имитатора РЛС/САРП
FURUNO FR-2135S/2165DS
станциям и имитируемые функции соот-ветствуют реальным.

Рис. 16.9. Радиолокационный тренажёр
NORCONTROL
BRIDGE SIMULATORS,
установленный в Киевской государственной
академии водного транспорта
16.6. ОСОБЕННОСТИ ТРЕНАЖЕРНОЙ ПОДГОТОВКИ ДЛЯ ПЛАВАНИЯ
НА ВНУТРЕННИХ ВОДНЫХ ПУТЯХ
При движении по внутренним водным путям (ВВП) радиолокационная информация на судах внутреннего и смешанного («река-море») плавания используется для обеспечения безопасного судоходства, в том числе расхождения со встречными судами в условиях нормальной и ограниченной видимости. Эта информация имеет специфический характер по ряду причин:
- необходимость использования радиолокационных станций в комплексе с другими навигационными приборами при управлении судном в условиях ограниченной видимости (независимо от наличия встречных судов);
- привязанность к участку ВВП, на котором она применяется, а также способов ее использования;
- обязательный учет гидрометеорологических факторов;
- особенности картографических материалов, используемых на ВВП, и, соответственно, необходимость применения в РЛС различных единиц измерения навигационных параметров;
- обязательный учет маневренных особенностей судов при расчёте по данным РЛС;
- необходимость выполнять международные и национальные требования к радиолокационному оборудованию судов;
- использование РЛС при плавании на сложных участках ВВП при частично отсутствующей (неосвещённой) навигационной обстановке.
Указанные особенности использования РЛС определяют основные требования к радиолокационному тренажеру на ВВП. Рассмотрим их основное содержание.
В соответствии с Правилами плавания на ВВП радиолокационная станция должна использоваться на судах в условиях нормальной и ограниченной видимости на водных путях с латеральной системой навигационного оборудования, а также на участках с неосвещаемой в тёмное время суток навигационной обстановкой. Кроме того, в Правилах содержатся требования к маневрированию судов в условиях ограниченной видимости в зависимости от их линейных размеров. Указанные требования предполагают возможность визуального наблюдения для обеспечения навигационной безопасности в любых условиях плавания, технического определения дальности видимости огней судов и навигационного оборудования на участках с освещённой, неосвещённой и частично снятой навигационной обстановкой. Радиолокационная станция, используемая в условиях ограниченной видимости, должна обеспечивать безопасное движение судов, их расхождение и навигационную безопасность плавания. Методика применения РЛС в комплексе с навигационными приборами при постоянном обращении к картам и лоции определяет необходимость наличия в составе тренажера блока визуализации. Его использование обеспечивает обучение судоводителей:
управлению судном при подготовке к прохождению конкретных участков ВВП (первоначальное обучение и предрейсовая подготовка);
своевременному
визуальному обнаружению судов в дневное
время, по огням в ночное время и по
информации, получаемой от РЛС и других
навигационных приборов, в условиях
ограниченной в идимости;
идимости;
визуальному определению характера ра-боты судов, их маневренных возможностей и размеров;
квалифицированной обработке информа-ции, получаемой от РЛС и других навигаци-онных приборов;
к
Отображение навигационной обстановки
на экране тренажера РЛС\САРП фирмы ВВS
Рис. 16.11.
определению
точности получаемой пер-вичной и
вторичной информации, учету факторов,
влияющих на точность РЛС и з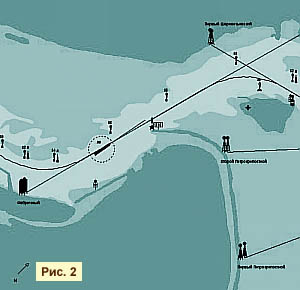 а-держку
в формировании вторичной радиоло-кационной
информации САС;
а-держку
в формировании вторичной радиоло-кационной
информации САС;
оценке навигационной ситуации по ви-зуальному наблюдению в дневное время, по огням в ночное время и по наблюдению за перемещением эхосигналов на имитаторах;
в
Рис. 16.12.
п
Отображение электронной карты на
дисплее тренажера РЛС\САРП фирмы ВВS
По Правилам плавания на ВВП на посту управления судном, кроме рулевого, должны находиться два лица из командного состава, в том числе капитан. Использование РЛС в условиях ограниченной видимости должно сочетаться с использованием средств УКВ-радиосвязи, что требует обязательного оборудования тренажера этими средствами и отработки распределения обязанностей между судоводителями.
Для применения расчетно-инструментального метода проводки судов и отработки действий обучаемых в условиях неосвещаемой и частично снятой навигационной обстановки тренажер должен обеспечивать возможность освоения длительных переходов по конкретным участкам ВВП и содержать набор всех сложных районов плавания.
Тренажёр должен состоять только из стандартных компьютерных компонент и иметь блочную структуру, позволяющую расширять и модернизировать его в дальнейшем. Он должен представлять собой интегрированную сетевую среду, включающую не менее трех рабочих мест (для предрейсовой подготовки комплектация может быть упрощена):
- рабочее место инструктора (РМИ), оснащенное аппаратурой контроля и управления процессом тренировки судоводителей;
- рабочие места судоводителей (РМС) (рулевые рубки) с аппаратурой, имитирующей работу пультов управления и радиолокационных станций любого типа, используемых на судах ВВП.
Рабочее место инструктора должно включать ситуационный дисплей, базу данных и имитатор речной радиостанции. Компьютер РМИ с соответствующим программным обеспечением должен выполнять функции сервера, собирая информацию о состоянии всех рабочих мест обучаемых и отвечая на запросы. РМИ должно выполнять следующие функции:
- загрузку районов плавания судов (не менее трех сложных речных участков, а также морской и озёрный) и соответствующих задач (упражнений). Район должен загружаться в виде электронной карты в проекции Гаусса или Меркатора;
- загрузку и сохранение в файлах упражнений (район плавания с расставленными на нем активными и пассивными судами).
Библиотека судов (база данных) тренажера должна содержать математические модели речных судов и составов (не менее пяти), учитывающие: гидроаэродинамические характеристики; скорость; направление течения, снос от течения.
Желательно также учесть: влияние мелководья на управляемость судна (ухудшение управляемости и просадка) и направление ветра.
Активные суда должны соотноситься с рабочими местами на других компьютерах.
Пассивные суда могут быть двух типов: свободно движущиеся с заданными курсом и скоростью и движущиеся по определенному маршруту. Пассивными судами могут стать любые из списка активных, а также другие (например, малые) суда.
Маршруты должны задаваться набором исходных точек. Полученные таким образом ломаные линии автоматически сглаживаются и могут быть скорректированы. Маршруты сохраняются и могут быть загружены из файлов.
Упражнения должны включать в себя информацию об условиях плавания (ночь/день, скорость и направление ветра, состояние огней на бакенах, створах, пассивных судах). Каждый огонь может быть включен или выключен с помощью «мыши». «Мышью» задаются и другие свойства объектов: местоположение, курс, скорость, тип судна и т.п. Должно обеспечиваться масштабирование произвольных фрагментов. При запуске упражнений должны активизироваться рабочие места, соответствующие активным судам. Инструктор может в любой момент прекратить выполнение упражнения, которое должно быть записано, а затем проиграно в ускоренном масштабе времени. Решения задач могут проверяться на месте инструктора (определение курсов и взаимных позиций, времени занятия позиций, расчет направлений и расстояний между произвольными точками). При совершении обучаемыми грубых ошибок, приведших к остановке упражнения, должно быть предусмотрено повторение неправильно выполненного элемента упражнения.
Рабочее место судоводителя (рулевая рубка) должно состоять: из пульта управления судном и УКВ-радиостанцией; судовой РЛС; программы визуализации окружающей надводной обстановки.
РМС должны: имитировать работу пультов судоводителей, судовых РЛС и систем связи; обеспечивать многократное выполнение обучаемым операторских процедур, соответствующих реальным в системе управления судном.
При соответствующей настройке каждое рабочее место судоводителя должно предоставлять инструктору возможность руководить обучением и анализировать действия слушателей.
Пульт управления судном и УКВ-радиостанцией может быть выполнен в нескольких модификациях:
аппаратно-компьютерной с квазиреальными органами управления;
с реальными органами управления.
Программа управления судном должна имитировать работу органов управления. Движение активного судна происходит в соответствии с интегрированием уравнений движения.
РМС должно быть оснащено:
устройством для управления главным двигателем;
рулевым устройством (штурвальное колесо) с авторулевым
индикаторами навигационных приборов;
указателями курса (репитер гирокомпаса), скорости (датчики скорости, лаг, тахометры), глубины (эхолот), положения руля, частоты вращения гребных винтов, угловой скорости поворота, скорости и направления ветра, судового и оперативного времени (часы, минуты, секунды);
выключателями огней и отмашек, коммутатором навигационных огней.
Имитатор радиолокационной станции должен обеспечивать:
имитацию работы не менее трех типов РЛС по выбору обучаемого;
формирование и индикацию радиолокационного изображения района плавания с учетом: местоположения судна, выбранной шкалы дальности, ориентировки по курсу и норду, высоты антенны, дальности до объектов, радиовидимости, помех;
отображение на экране: не менее пяти «активных» судов, не менее пяти «пассивных» целей, управляемых с пульта инструктора, радиовидимой береговой обстановки, плавучих средств навигационного ограждения судового хода;
решение задачи автосопровождения и определения параметров движения целей, определение ситуации сближения, расчет маневра расхождения;
режимы истинного и относительного движения.
Программа визуализации должна показывать надводную обстановку вокруг судна для данного рабочего местоположения. При этом должна обеспечиваться возможность произвольного изменения видимости с отражением кинематики судна, ночных или дневных условий, огней на знаках навигационной обстановки, их нумерации на участке, огней на судах. Точка наблюдения должна произвольно перемещаться относительно судна, а угол наблюдения - изменяться в диапазоне от 0 до 360 град. Должна быть предусмотрена возможность масштабирования (режим «бинокль»).
Данные по районам плавания подготавливаются на основе Атласа речных путей и фотографий берегов, что обеспечивает высокую степень достоверности визуализации.
Внешний вид речного тренажера фирмы BBS представлен на рис. 16.13.
С июня 2001 г. такой
тренажер, состоящий и з
шести РМС и одного РМИ, установлен в
Санкт-Петербургском универ-ситете
водных коммуникаций.
з
шести РМС и одного РМИ, установлен в
Санкт-Петербургском универ-ситете
водных коммуникаций.
В
Внешний вид речного тренажера фирмы
BBS
Рис. 16.13.
Он позволяет имитировать и отраба-тывать как лоцманскую, так и штурманс-
кую технологию судовождения по внутренним водным путям.
Тренажер представляет собой интегрированную сетевую среду, выполненную в виде гибкой наращиваемой структуры функциональных модулей, реализующих обязательные функции органов управления, связи и индикации. Гибкость программного обеспечения тренажера позволяет дополнять его модулями для дальнейшего развития по другим программам обучения или переподготовки, учитывая изменяющиеся требования к подготовке судоводителей речного и морского флота.
Обучение судоводителей проводке судов по внутренним судоходным путям в условиях ограниченной видимости или частично отсутствующей плавучей обстановки осуществляется по специальной методике.
В основу данной методики положена предварительная штурманская обработка участка пути. С использованием навигационной карты составляется схема движения судна, которая затем вносится в штурманскую карту-схему. На километровой сетке в удобном масштабе наносятся радиолокационные ориентиры (устья рек, острова, мысы), плавучая обстановка и номера буев, береговая обстановка, ширина, направление, угол поворота и радиус ширины судового хода, протяженность прямолинейных участков, места якорных стоянок, навигационные опасности, необходимые пеленги и дистанции в начальных и конечных точках поворота и другая важная для капитанов информация.
К расчетной части методики относится определение курсов судна на прямолинейных участках пути, их протяженности и времени прохождения. На криволинейных участках пути по снятым с карты радиусам закруглений рассчитываются угловая скорость судна и время прохождения криволинейного участка пути. Расчетные угловые скорости в зависимости от скорости судна и радиуса закруглений занесены в таблицу, удобную для оперативного пользования.
С помощью расчетной части методики можно обеспечить непрерывную проводку судна и контроль за его движением инструментальным методом, используя РЛС, показатель угловой скорости, лаг, гирокомпас и авторулевое устройство.
На речном тренажере фирмы ВSS с использованием такой методики разработано двенадцать задач с различными условиями плавания (день, ночь, туман, ветер). Отрабатываются маневренные характеристики моделей, обгон и расхождение судов, их движение судов в условиях ограниченной видимости и с частично снятой обстановкой (до 50%).
В перспективе планируется дальнейшее развитие тренажерной техники, обеспечивающей отработку: постановки судов на якорь, их швартовки, проводки судов и составов под мостами, входа и выхода их шлюза, элементов расхождения и обгона в различных погодных условиях с разными моделями и других операций, характерных для судоходства на внутренних водных путях.
Раздел III
АМПЛИТУДНЫЕ АЗИМУТАЛЬНЫЕ РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ
Глава 17 Судовые радиопеленгаторы
Глава 18 Погрешности радиопеленгования
Глава 19 Радиодевиация
Глава 20 Радиомаяки
|