

Глава 25 спутниковые радионавигационные системы
25.1 ОБЩИЕ СВЕДЕНИЯ О СПУТНИКОВЫХ РНС
Специфика работы морского, речного и рыбопромыслового флотов определяет необходимость применения высокоточных средств навигации, которые бы с минимумом затрат обеспечили удовлетворение современных и перспективных требований, предъявляемых потребителями в любом районе Земного шара.
Особую значимость вопросы надёжного, высокоточного контроля за положением судна приобретают при плавании в прибрежной зоне, на подходных путях, в узкостях, каналах и на акваториях портов, где последствия аварии судна в большой степени связаны с риском загрязнения окружающей среды. Для удовлетворения современных требований к навигационному обеспечению судоходства внедряются качественно новые средства судовождения, в том числе спутниковые навигационные системы (СНС) с использованием искусственных спутников Земли (ИСЗ), которые в последнее время получили большое признание.
Основные преимущества СНС перед другими РНС:
– глобальность;
– высокая точность определения места независимо от географического района и гидрометеорологических условий.
СНС включает в себя следующие основные элементы:
– систему ИСЗ, находящихся на заданных орбитах и имеющих на борту специальное радиотехническое оборудование, позволяющее излучать или ретранслировать радиосигналы;
– наземный комплекс, обеспечивающий управление ИСЗ и их бортовой аппаратурой, определение параметров орбитального движения спутников и передачу их на ИСЗ;
– бортовую аппаратуру для навигационных измерений.
Принцип работы СНС основан на использовании ИСЗ как опорных навигационных точек с известными координатами.
25.1.1. Основные закономерности движения ИСЗ
Для движения ИСЗ по орбите необходимо, чтобы сила земного притяжения была скомпенсирована центробежной силой, возникающей при движении тела вокруг Земли. Это условие приводит к равенству:
![]() , (25.1)
, (25.1)
где: m – масса ИСЗ;
g – ускорение свободного падения;
0 = R + H – радиус орбиты, т.е. расстояние от центра Земли до ИСЗ;
– угловая скорость ИСЗ относительно центра Земли.
Т.к.
![]() и
и
![]() ,
то, подставив эти выражения в формулу
(25.1), получим формулу для определения
линейной скорости VC
движения ИСЗ по круговой орбите:
,
то, подставив эти выражения в формулу
(25.1), получим формулу для определения
линейной скорости VC
движения ИСЗ по круговой орбите:
![]() . (25.2)
. (25.2)
Используя в формуле (25.2) соотношение H/R = K и подставив R = 6371 км; g0 = 9,81 м/сек2, получим
![]() . (25.3)
. (25.3)
Скорость, при которой начинается движение ИСЗ по окружности вокруг Земли, называется круговой или первой космической скоростью.
При H = 0 она равна V1 = VC = 7.91 км/с.
Период обращения спутника, т.е. время одного его оборота вокруг Земли по круговой орбите радиуса 0,
![]() .
(25.4)
.
(25.4)
Значения V1 и T для круговых орбит с разной высотой показаны в табл.25.1.
Табл. 25.1
Н, км |
0 |
250 |
1000 |
20 240 |
35 870 |
Т, мин |
84 |
89 |
106 |
12 ч |
24 ч |
V1, км/с |
7,91 |
7,76 |
7,35 |
3,87 |
3,07 |
ИСЗ спутниковых РНС, нашедших применение на судах морского флота, двигаются по орбитам с высотой:
- порядка 1000 км – низкоорбитальные СНС «Транзит» (США) и «Цикада» (Россия);
- порядка 20240 км – среднеорбитальные СНС НАВСТАР (США) и ГЛОНАСС (Россия);
Большое значение для практического использования имеют спутники с таким периодом обращения Т, при котором они за время звёздных суток делают целое число оборотов вокруг Земли. Эти геостационарные спутники называются периодическими или синхронными. Они пролетают над данными районами Земли ежедневно в одно и тоже время.
Синхронный спутник на орбите с высотой Н = 35 870 км имеет Т = 24 ч (точнее 23 ч 56 мин 4 с – одни звёздные сутки) и называется суточным. Такие спутники нашли применение в системах связи и телевидения.
Следует отметить, что ИСЗ двигаются по круговой орбите только в частном случае. В общем случае орбита ИСЗ является эллиптической, имеющей большую полуось a и малую b полуоси. Ближайшая к центру Земли точка орбиты называется перигеем П, наиболее удалённая апогеем А (рис.25.1).
Э ллиптическую
орбиту характеризуют 6 элементов
Кеплера.
ллиптическую
орбиту характеризуют 6 элементов
Кеплера.
1. Наклонение i плоскости орбиты к плоскости экватора.
2. Прямое восхождение восходящего узла орбиты.
3. Угловое расстояние перигея от восходящего узла орбиты N1.
4. Эксцентриситет орбиты
![]() .
.
5. Параметр орбиты
![]() .
.
6. Время прохождения спутника через перигей или восходящий узел.
Первые пять элементов характеризуют пространственное положение орбиты ИСЗ и направление его движения, шестой – положение спутника на орбите.
Для определения места судна необходимо знать координаты спутника в момент наблюдений. Исходными величинами для расчётов являются приведённые выше параметры орбиты.
Реальная орбита спутника отличается от кеплеровской, во-первых, из-за того, что реальная форма Земли (геоид) отлична от шара, во-вторых, из-за влияния на спутник различных возмущающих сил, таких как сопротивление земной атмосферы, притяжение Луны и Солнца, давление солнечной радиации, взаимодействие спутника с магнитным полем Земли. Поэтому кеплеровские элементы непрерывно меняются, что необходимо учитывать при расчёте места ИСЗ. В связи с этим всем судам, использующим ИСЗ для определения места, должны сообщаться не только начальные параметры Кеплера, соответствующие какому-то параметру времени, но и периодически обновляемые поправки к ним. Все эти данные получили название орбитальной информации. В действующих спутниковых РНС орбитальная информация считывается из запоминающего устройства спутника и используется для фазовой манипуляции несущих частот, на которых передаются сигналы от спутника. Время существования спутника зависит от высоты орбиты, массы, размеров спутника, в частности от диаметра его поперечного сечения.
25.1.2. Орбиты ИСЗ и их особенности
Орбитой спутника называется траектория его движения относительно центра Земли. Плоскость орбиты всегда проходит через центр Земли.
Особенности и методы использования ИСЗ для целей навигации и связи в значительной степени зависят от того, на какую орбиту они запущены.
Орбиты ИСЗ классифицируются по двум признакам:
-
i = 90
- в зависимости от
высоты Н
орбиты над
з емной
поверхностью.
емной
поверхностью.
П о
первому признаку (рис. 25.2) орбиты
подразделяются на:
о
первому признаку (рис. 25.2) орбиты
подразделяются на:
- экваториальные (i = 0 или 180);
- полярные (i = 90);
-
i = 0
По второму признаку подразделяются на:
- низкие (Н 5000 км) – «Транзит», «Цикада»;
- средние (5000 Н 22 000 км) – ГЛОНАСС, НАВСТАР;
-
Рис. 25.2.
Расположение орбит ИСЗ
Среди последних выделяются синх-ронные орбиты с Н = 35 870 км. Синхронный суточный спутник, выведенный на экватори-
альную орбиту, будет неподвижно «висеть» над определенной точкой земной поверхности. Такой спутник получил название стационарного. Если i 0, то синхронный ИСЗ будет периодически смещаться в меридиональном направлении, захватывая северную и южную полярные области (квазистационарный ИСЗ).
М алый
круг, в пределах которого могут приниматься
радиосигналы спутника S0,
называется зоной
радио-видимости
(рис. 25.3). Сферический диаметр
этой зоны определяется по формуле:
алый
круг, в пределах которого могут приниматься
радиосигналы спутника S0,
называется зоной
радио-видимости
(рис. 25.3). Сферический диаметр
этой зоны определяется по формуле:
![]() .
(25.5)
.
(25.5)
Для стационарного ИСЗ при Н = 35870 км; R = 6371 км диаметр зоны радиовидимости 162. Это означает, что стационарный ИСЗ будет теоретически видим в Северном и Южном полушарии до широты = 81 N (S) (рис. 25.4). Для надежного приёма сигналов необходимо, чтобы ИСЗ имели высоту не менее 10 над горизонтом. Это требование вызвано тем, что при малой высоте спутника будут на-
блюдаться высокий уровень помех и большое затухание радиоволн в атмосфере. Поэтому границы зоны радиовидимости несколько сужаются (до = 71). На рис. 25.5 показаны области, в пределах которых наблюдатель «видит спутник с h10 над горизонтом.
Стационарные ИСЗ
не нашли применение в навигации, но
широко используются для связи и
телевидения. Например, для обеспечения
глобальной радиосвязи на стационарную
орбиту выводят три ИСЗ международная
система связи INMARSAT (см. рис. 25.5),
применяющаяся на судах морского флота
с 1982 года.

Для низкоорбитального ИСЗ (Н = 1000 км; R = 6371 км) по формуле (25.5) получаем диаметр зоны видимости:
60,5 = 3639 миль.
При условии наблюдения спутника на высоте более 10, что необходимо для более точного определения места, получаем диаметр зоны видимости:
50 = 3000 миль.

100 80 60 40 20 0 20° 40 60 80° 100 120°140 160 180 160 140 120 100
W E
Рис. 25.5. Границы зоны радиовидимости,
в пределах которых наблюдается спутник
при h
10. Зоны радиовидимости
ИНМАРСАТ
Ш ирина
Атлантического океана в наиболее широкой
его части около 3000 миль, поэтому один
спутник на полярной орбите, пролетая
над серединой океана, может наблюдаться
в трёх его точках.
ирина
Атлантического океана в наиболее широкой
его части около 3000 миль, поэтому один
спутник на полярной орбите, пролетая
над серединой океана, может наблюдаться
в трёх его точках.
Так как спутник движется, то будет перемещаться и зона видимости, образуя на поверхности Земли полосу видимости. Полоса видимости для ИСЗ на полярной орбите для одного витка показана схематично на рис. 25.6.
Из-за вращения Земли полоса видимости, соответствующая каждому последующему витку, будет смещаться к западу на расстояние d (в милях):
d = 15 sin i cos T. (25.6)
Для спутника на полярной орбите, имеющего Н = 1000 км и Т = 106 мин, получаем величину смещения полосы видимости, равную на широте = 0 d = 1575 миль, = 30 d = 1362 мили, = 60 d = 788 миль.
Из этого видно,
что смещение d
полосы видимости к W меньше ширины полосы
.
Поэтому на
каждом следующем витке будет иметь
место перекрытие полосы видимости. Это
перекрытие, если выражать в его процентах
![]() ,
для нашего примера равно:
= 0
– 57,
= 60
– 78,
= 90
– 100.
Отсюда следует, что один и тот же спутник
на полярной орбите может наблюдаться
в одном и том же месте несколько раз
подряд, например в средних широтах, по
крайней мере, два раза. Это означает,
что по одному и тому же спутнику в средних
широтах можно определить место четыре
раза в сутки: два раза подряд с интервалом,
равным периоду обращения спутника, и
затем через 10...12 ч ещё два раза подряд,
когда Земля, вращаясь с запада на восток,
переместит наблюдателя на вторую
половину орбиты спутника.
,
для нашего примера равно:
= 0
– 57,
= 60
– 78,
= 90
– 100.
Отсюда следует, что один и тот же спутник
на полярной орбите может наблюдаться
в одном и том же месте несколько раз
подряд, например в средних широтах, по
крайней мере, два раза. Это означает,
что по одному и тому же спутнику в средних
широтах можно определить место четыре
раза в сутки: два раза подряд с интервалом,
равным периоду обращения спутника, и
затем через 10...12 ч ещё два раза подряд,
когда Земля, вращаясь с запада на восток,
переместит наблюдателя на вторую
половину орбиты спутника.
Изложенное показывает, что один низкоорбитальный спутник одновременно может наблюдаться только в ограниченном районе Земли. В процессе движения ИСЗ сделает несколько оборотов вокруг Земли и при i = 90 будет наблюдаться во всех её точках. При i 90 след (трасса) ИСЗ на земной поверхности будет доходить до = i.
При Н
= 1000 км суточное число оборотов ИСЗ
![]() .
.
Следовательно, один ИСЗ на полярной орбите может в течение суток обеспечить определение места во всех точках Земли, но таких обсерваций будет мало и они будут редки.
Минимальное число ИСЗ для определения места с требуемой дискретностью треб может быть определено по формуле:
![]() ,
,
где
![]() - минимальная разность долгот на данной
параллели, охватываемая полосой видимости
спутника за один его виток.
- минимальная разность долгот на данной
параллели, охватываемая полосой видимости
спутника за один его виток.
Например, для спутников на полярной орбите, имеющих Н = 1000 км и Т = 106 мин, для определения места в районе экватора (min = = 50) с дискретностью треб = Т получаем:
![]() ,
,
т.е. заданная дискретность обеспечивается 4 спутниками. Для дискретности треб = 60 мин требуется
![]() спутников.
спутников.
Для обеспечения возможности непрерывного определения места судна в любое время суток и в любом месте Земли необходимо применить синхронно вращающиеся спутники, причём число их должно быть значительным.
Применение же независимо вращающихся спутников может обеспечить лишь дискретные определения места судна. Увеличение числа ИСЗ не устранит этого недостатка. Поэтому система с ограниченным числом низкоорбитальных ИСЗ может быть лишь средством дискретной навигации.
Большое значение для использования ИСЗ имеет продолжительность его наблюдения. Очевидно, она будет определяться временем прохождения зоны видимости через место наблюдателя. Для неподвижного наблюдателя, находящегося в плоскости орбиты ИСЗ, будет иметь место максимальная продолжительность наблюдения спутника, определяемая выражением
![]() ,
,
где ТЗ и ТВ – время захода и восхода спутника соответственно.
Например, для низкоорбитального спутника (Н = 1000 км) получим
![]() мин.
мин.
На практике это время не более 16 мин.
Если наблюдатель находится на некотором расстоянии от трассы ИСЗ, то продолжительность его наблюдения будет меньше.
СНС с низкоорбитальными ИСЗ являются более старыми системами, использующими 4 или 5 спутников на полярных орбитах. Как было отмечено ранее, низкоорбитальный принцип построения СНС характеризуется относительно большой дискретностью в обсервациях, поэтому такие системы перестали удовлетворять требованиям в отношении точности, всепогодности, круглосуточной работы и зоны охвата.
В отличие от систем с низкоорбитальными ИСЗ, СНС со средне-орбитальными ИСЗ спроектированы таким образом, что в любой точке Земной поверхности можно принимать сигнал не менее чем с четырех спутников.
25.2. МЕТОДЫ ОПРЕДЕЛЕНИЯ МЕСТА СУДНА С ПОМОЩЬЮ
НАВИГАЦИОННЫХ СПУТНИКОВ
Искусственный спутник Земли можно представлять как навигационный ориентир, поднятый на высоту нескольких сотен и даже тысяч км над поверхностью Земли. Двигаясь по законам всемирного тяготения по заранее рассчитанной орбите и излучая радиосигналы, он является навигационным ИСЗ – космическим радиомаяком. Принципиальной основой использования ИСЗ в качестве опорных ориентиров является закономерный характер их движения вокруг Земли. Для определения места по ИСЗ применяются следующие методы:
- дальномерный;
- радиально-скоростной;
- разностно-дальномерный;
- угломерный.
Дальномерный метод. В этом методе навигационным параметром является наклонная (топоцентрическая) дальность до спутника (рис. 25.7). Ей соответствует изоповерхность в виде сферы с центром, совпадающим с ИСЗ, и радиусом, равным измеренной дальности.
При пересечении сферической изоповерхности с поверхностью Земли получим изолинию, соответствующую измеренной дальности до спутника, – окружность сферического радиуса D. Его можно получить из S0OK:
2
= R2
+ (R
+ H)
2
– 2R(R
+H)
cosD
![]() ;
;
Градиент этой изолинии:
g = cos hS, (25.7)
где hS – видимая угловая высота ИСЗ над горизонтом.

Из выражения (25,7) видим, что для определения изолинии с наибольшей точностью надо наблюдать ИСЗ, имеющие малые высоты. Для определения места необходимо иметь несколько изолиний. Их можно получить, выполнив наблюдения нескольких ИСЗ или повторные наблюдения одного и того же низкоорбитального ИСЗ через небольшие промежутки времени.
Топоцентрическая дальность может быть измерена пассивным или активным методом. Пассивный метод состоит в определении по времени t распространения радиосигнала от спутника до приёмника:
= c(t + t),
где t – поправка к отсчёту времени t из-за сдвига временных шкал часов спутника и приёмника.
Для измерения дальности пассивным методом с высокой точностью на спутнике и на судне должны быть высокостабильные опорные генераторы (ОГ). Так, например, для обеспечения точности измерения дальности не хуже 10 м допустимое относительное расхождение частот опорных генераторов ПИ и НО при существующей периодичности заходов судов в порты (интервалах между коррекциями временных шкал) должно лежать в пределах 10-14 – 10-15, достижение которого — достаточно сложная техническая задача. Поэтому в настоящее время более широко используется модификация дальномерного способа — псевдодальномерный метод. Более подробно о псевдодальномерном методе определения места изложено в подразделе 21.1.2 главы 21.
Дальномерный пассивный метод применяется в спутниковых РНС со среднеорбитальными ИСЗ (НАВСТАР, ГЛОНАСС) с использованием псевдодальномерного принципа построения СНС, позволяющего применять в приёмоиндикаторах ОГ с относительно не высокой стабильностью и используя четыре и более линии положения.
Активный метод измерения дальности до спутника аналогичен методу измерения расстояния до активного радиолокационного отражателя:
![]() .
.
Этот метод не требует наличия высокостабильных генераторов частоты на судне. Но при его использовании возникает другая проблема – обеспечение одновременного обслуживания сотен и тысяч потребителей.
Радиально-скоростной (доплеровский дифференциальный) метод. Быстрое перемещение ИСЗ в зоне радиовидимости наблюдателя позволяет приме-
н ить
метод определения места, осно-ванный
на измерении радиальной скорос-
ить
метод определения места, осно-ванный
на измерении радиальной скорос-
ти, т.е. скорости сближения спутника с наблюдателем. Для измерения радиаль-ной скорости применяется эффект Доплера. Его сущность при использова-нии в спутниковых РНС заключается в том, что при быстром перемещении спутника, излучающего колебания строго определенной частоты f0, неподвижный наблюдатель на Земле будет принимать колебания другой частоты f. Разность этих колебаний, называемая Доплеров-ским смещением частоты, определяется по формуле
![]() ,
(25.8)
,
(25.8)
где v – скорость движения ИСЗ по орбите;
– направление на наблюдателя со спутника относительно вектора его скорости (рис. 25.8);
0 – длина волны, соответствующая частоте f0.
Входящая в формулу (25.8) величина v cos = v называется радиальной скоростью. Поэтому формулу (25.8) можно написать в виде:
![]() . (25.9)
. (25.9)
Так как частота
f0
передатчика спутника и опорная частота
судового генератора могут иметь
постоянную разность
f,
то формула (25.9) приобретает вид
![]() (25.10)
(25.10)
Постоянная разность f частот должна определяться как дополнительная неизвестная.
Из формул (25.8) и (25.9) видно, что если Fd = const, то = const и v = const. Углу = const в пространстве соответствует изоповерхность в виде кругового конуса, вершина которого с местом ИСЗ, а ось – с вектором его скорости.
Так как судно находится на Земле, то его место надо искать на кривой КК /, по которой конус пересекается с поверхностью Земли (в пределах зоны радиовидимости). Эта кривая получила название изодопы.
И зодопа
– это изолиния на поверхности Земли,
характерными свойствами которой являются
постоянство доплеровского смещения
частоты и постоянство радиальной
скорости. По своей форме изодопа в
пределах зоны видимости близка к
сферической гиперболе. Перемещение
спутника приводит к перемещению зоны
видимости и соответствующих ей изодоп.
Точка пересечения изодоп дает место
судна.
зодопа
– это изолиния на поверхности Земли,
характерными свойствами которой являются
постоянство доплеровского смещения
частоты и постоянство радиальной
скорости. По своей форме изодопа в
пределах зоны видимости близка к
сферической гиперболе. Перемещение
спутника приводит к перемещению зоны
видимости и соответствующих ей изодоп.
Точка пересечения изодоп дает место
судна.
Для определения места судна требуется несколько изолиний – изодоп. Вторую и последующие изодопы получают вскоре после пер-вой. В частном случае, когда = 90 (судно находится на кратчайшем расстоянии от спутника), конус разворачивается в плоскость и изодопа превращается в дугу большо-го круга. Изодопы пересекаются в двух точках – К и К1 (рис. 25.9), лежащих по обе стороны трассы ИСЗ. Т.е. появляется неоднозначность в определении места судна. Указанная двузначность может быть разрешена с помощью счисления. За время пролёта
низкоорбитальных ИСЗ может быть получено несколько сотен изодоп. Например, при ТНmax = 16 мин = 960 с и измерении доплеровского смещения частоты за 4 с может быть получено 240 изодоп. Как видно, информация со спутника быстротечна и отличается большой избыточностью. Её приём и оперативная обработка вручную невозможны. Для этого необходимы автоматический приёмник и ЭВМ (процессор). Результаты измерения обрабатываются по способу наименьших квадратов. Движение судна за время наблюдения может быть учтено обычным способом (приведение наблюдений к одному зениту).
Разностно-дальномерный метод. Этот метод основан на измерении разности топоцентрических расстояний между судном и двумя положениями одного и того же ИСЗ в последовательные моменты времени.
В своём движении по орбите спутник последовательно проходит точки S1, S2 и т.д., расстояние между которыми называется базой (рис. 25.10). Её длина b определяется выражением:
![]() ,
,
где tИ – время интегрирования – промежуток времени между двумя последовательными моментами наблюдения спутника;
Т – период обращения спутника.

Рис. 25.10. К разностно-дальномерному
методу определения места по ИСЗ
Если измерить разность расстояний 1= 2 - 1 двух последовательных положений спутника, то место наблюдателя К окажется на изоповерхности, представляющей собой гиперболоид вращения, фокусы которого совпадают с концами базы, т. е. положениями спутника на орбите в моменты начала и конца наблюдений. Гиперболоид образован вращением гиперболы, соответствующей измеренной разности расстояний , вокруг базы S1S2 и является поверхностью второго порядка.
Пересечение гиперболоида с поверхностью Земли в пределах зоны радиовидимости даёт изолинию – сложную кривую, близкую по форме к сферической гиперболе. На этой гиперболе и будет находиться место судна. Когда база займёт новое положение S2 S3, измеряют вторую разность расстояний 2 = 3 2 и получают второй гиперболоид и вторую гиперболу, соответст-вующую величине 2. Аналогично можно получить 3 и третью гиперболу и т. д. Место судна получается в точке пересечения двух, трёх и более гипербол.
Разность расстояний i можно получить подсчётом числа импульсов доплеровской частоты в течение промежутка времени, необходимого спутнику для прохождения длины базы b. Такой подсчёт математически представляет собой интегрирование доплеровского смещения частоты по времени в интервале (t2 + t2) – (t1 + t1). После интегрирования получаем:
= 2 1 = 0 Nб f tи,
где Nб – число импульсов биений доплеровской частоты;
f = fог – f – постоянный относительный сдвиг частот генераторов приёмника м ИСЗ;
tи = t2 – t1 – момент начала и конца интервала.
Таким образом, каждому подсчитанному числу Nб импульсов биений доплеровской частоты соответствует вполне определенное значение разности расстояний от судна до двух последовательных положений спутника на орбите в моменты начала и конца интервала tи. Промежуток времени tи называется интервалом интегрирования. Постоянная величина f tи, представляющая собой погрешность в определении числа импульсов биений из-за сдвига частоты судового опорного генератора и его кратковременной нестабильности, должна определяться как дополнительная неизвестная. Данный метод определения места судна получил название доплеровского интегрального.
Из изложенного видно, что при использовании доплеровского интегрального метода спутниковая РНС аналогична наземной гиперболической РНС. Спутник в своём движении по орбите является последовательно как бы несколькими опорными станциями, для каждой пары которых измеряется разность расстояний до судна. Периодически спутник передаёт орбитальную информацию, и если место судна будет определено относительно некоторых фиксированных положений спутника, оно может быть определено и относительно связанной с Землёй географической системы координат.
Число изолиний зависит от времени наблюдения спутника и интервала интегрирования. Например, в ПИ спутниковой РНС «Транзит» приняты tи = 2 мин, 1 мин, 30 с, 24 с. При максимальном времени наблюдения низкоорбитального спутника ТНmax = 16 мин может быть получено соответственно 8, 16, 32 и 40 линий положения. При более коротких интервалах интегрирования можно получить большее число линий положения, что повышает вероятность обсерваций по спутниковой РНС.
Так как гиперболы на поверхности Земли пересекаются в двух точках, то определение места будет двузначным. Двузначность разрешают с помощью счисления.
При уменьшении интервала интегрирования разностно-дальномерный метод переходит в радиально-скоростной метод. Таким образом, доплеровский дифференциальный метод есть частный случай доплеровского интегрального метода, когда интервал интегрирования равен 1с. При этом гиперболоид вращения сливается с пространственным асимптотическим конусом.
Использование того или иного метода зависит от интервала интегрирования, применённого в ПИ, а спутники будут одними и теми же.
Спутниковая РНС доплеровского типа обладает свойством направленности точности изолиний, как и любая наземная гиперболическая РНС. Поэтому с геометрической точки зрения спутниковая РНС, основанная на использовании доплеровского метода, может быть отнесена к классу гиперболических систем. Но в отличии от наземных гиперболических РНС, имеющих фиксированные базы, в данном случае получаем гиперболическую систему с перемещающейся базы.
Угломерный метод. При угломерном методе определяется угловая высота спутника. Являясь наиболее простым по принципу и близким к астрономическим методам, он позволяет определить место по одному ИСЗ, так как за время пролёта спутника в зоне видимости значительно изменяются его высота и азимут, и тем самым появляется возможность за короткий промежуток времени получить несколько изолиний, пересекающихся с друг с другом. Судовое устройство, представляющее собой радиосекстан, с помощью остронаправленной антенны должно следить за спутником с точностью, равной долям угловой минуты. Размеры такой антенны (даже в сантиметровом диапазоне волн) становятся неприемлемыми в судовых условиях, тем более, что её основание должно иметь хорошую стабилизацию пространстве, а построить на качающемся судне высокоточную опорную систему координат – искусственный горизонт и направление истинного меридиана для отсчёта углов очень сложно.
25.3. ИСПОЛЬЗОВАНИЕ СПУТНИКОВОЙ РНС ДОПЛЕРОВСКОГО ТИПА
Примерами спутниковых РНС доплеровского типа являются спутниковые навигационные системы «Транзит» (США) и «Цикада» (Россия).
Созданная в США спутниковая навигационная система ВМС «Транзит», позднее получила название «Навсат» (NAVSAT – Navy Navigation Satellite). К такой системе получили доступ и суда гражданского морского флота. В США в конце XX века насчитывалось свыше 40 000 гражданских пользователей системы «Навсат». Спутники системы «Навсат» выводились на околополярные орбиты высотой 965 км. Они непрерывно вещали на двух частотах, причем оборудование пользователя могло принимать либо один, либо оба сигнала. Преимущество двухчастотного приема в том, что он дает возможность вычислять поправку на задержку, связанную с распространением сигнала в атмосфере. Погрешность определения местоположения на одной частоте равна приблизительно 500 м, а на двух – 25 м. Такая система имеет сравнительно низкую стоимость приёмного оборудования, однако не обеспечивает сплошного охвата. Поэтому система «Навсат» была непригодна для воздушной навигации.
Аналогом спутниковой навигационной системы «Транзит» является спутниковая система «Цикада» (Россия).
Указанные спутниковые РНС являются более старыми системами по сравнению со спутниковыми системами, использующие среднеорбитальные ИСЗ. Определение местоположения в таких системах – дискретное (периодическое), в отличие от непрерывного определения, как в случае GPS. Они требуют, чтобы приёмник был неподвижен во время определения положения, или двигался в известном направлении и с известной скоростью.
Спутниковые навигационные системы «Транзит» (США) и «Цикада» (Россия) перестали удовлетворять требованиям в отношении точности, всепогодности, круглосуточной работы и зоны охвата и в настоящее время используются, как правило, в военных целях и при выполнении специальных работ. В гражданском судоходстве их применение ограничено.
В связи с ограниченным использованием
указанных систем в данном под-разделе
даются только общие сведения об их
работе.
связи с ограниченным использованием
указанных систем в данном под-разделе
даются только общие сведения об их
работе.
Обычно в созвездие навигационных спутников входит 4…6 ИСЗ, например, в РНС «Цикада» 5 ИСЗ, орбиты которых образуют фигуру, изображённую на рис. 25.11. Для равномерной дискрет-ности обсерваций плоскости орбит должны располагаться в пространстве под примерно одинаковыми углами. Однако это не всегда соблюдается. Спутники передают радиосигналы, состоящие из меток времени, орбиталь-ной информации и измерительной ин-формации (доплеровский сдвиг частот). Кроме того, передаются сигналы синхро-низации, опознавательные сигналы. Спутники РНС «Транзит» и «Цикада» передают информацию на двух частотах: f1 = 400 МГц и f2 = 150 МГц. Это позволя-
ет при измерении в ПИ доплеровского смещения частоты также на двух частотах исключать влияние ионосферной погрешности.
Долговременная нестабильность задающего генератора ИСЗ составляет 10–9, а кратковременная – 10–11.
Станции слежения принимают радиосигналы со спутников и передают их по линиям связи в КВЦ. Здесь сигналы со спутников обрабатываются в ЭВМ и на основании результатов обработки получается орбитальная информация, которая вводится в память ЭВМ спутников с помощью станций ввода, когда они оказываются в зоне видимости спутников. Обновление орбитальной информации спутников производится через 12…14 ч (в РНС «Цикада» – через 24 часа). Одновременно происходит коррекция часов спутников со всемирным координированным временем, обеспечиваемым обсерваторией времени. Спутники, приняв новую орбитальную информацию, репетуют её. Эта информация в КВЦ сравнивается с вводимой орбитальной информацией. В случае ошибок производится повторный ввод этой информации в память спутника.
Передача информации со спутника производится двухминутными блоками, определяемыми в конце чётной минуты метками времени.
Важнейшим компонентом системы, в котором реализуются результаты работы, являются судовые ПИ. Они имеют следующие основные особенности: число каналов приёма информации (f1 = 400 МГц или f1 = 400 МГц и f2 = 150 МГц); интервал интегрирования (2 мин, 1 мин, 30 с, 24 с); способ индикации результатов определения места (телетайп, цифровое табло, дисплей); способ оценки качества обсерваций (интегральный или с помощью отдельных признаков); решаемые дополнительные задачи.
Наибольшее распространение на судах морского транспортного флота получили одноканальные ПИ с интервалом интегрирования 24 с. Индикация результатов производится на дисплее с оценкой качества по отдельным признакам.
На гидрографических и океанографических судах применяются так же двухканальные ПИ, отличающиеся повышенной точностью определения места.
Определение места по спутнику возможно, когда судно находится в зоне его радиовидимости, при этом особенно качественные (надёжные) обсервации получаются, если угловая высота ИСЗ над горизонтом находится в пределах от 10 до 75. При малых высотах бывает высотный уровень помех и большое затухание радиоволн в атмосфере. При больших высотах изолинии пересекаются под очень острым углом, что приводит к большим погрешностям по долготе.
Наибольшее время наблюдений спутника составляет 16 мин, наименьшее – 6 мин. Наименьшая продолжительность наблюдений, необходимая для получения места, получается как сумма длительности трёх блоков орбитальной информации, принимаемых со спутника. Приём трёх двухминутных блоков необходим для получения орбитальной информации с высокой степенью надёжности (проверяется в ПИ методом верификации).
Число линий положения, получаемых при различных интервалах интегрирования, приведено в табл. 25.2.
Табл. 25.2
-
Интервал
интегрирования
Число линий положения
ТН max = 16 мин
ТН min = 16 мин
2 мин
1 мин
30 с
24 с
8
16
32
40
3
6
12
15
На практике не всегда получают теоретически возможное число линий положения при данном времени наблюдения спутника. Часть сигналов может быть не принята из-за помех, нарушения синхронизации и других причин, что приводит к потере определённого числа линий положения.
Минимальное число линий положения, необходимое для получения места при различных интервалах интегрирования, равно числу линий положения, принимаемых в течение 6 мин.
Как правило, каждый спутник позволяет получить в одном и том же районе 4 обсервации в сутки (в средних широтах).
Для определения места судна необходимо заблаговременно (как правило, за несколько часов) включить ПИ.
После включения ПИ необходимо в ЭВМ ввести следующие исходные данные:
- гринвичское Тгр или московское Тмск время (погрешность не более 14 мин);
- с, с (с ошибкой не более 60…100 миль);
- скорость и курс судна (если они не вводятся автоматически);
- высоту ha приёмной антенны над поверхностью референц-эллипсоида;
П осле
ввода указанных данных ПИ находится в
дежурном режиме. При появлении над
горизонтом навигационного спутника ПИ
принимает его сигналы, синхронизируется
ими, выделяет из них орбитальную
информацию, измеряет навигационные
параметры, обрабатывает результаты
измерений, решает навигационную задачу
и выдаёт результат. Пример выдачи
информации на дисплее (приёмоиндикатор
МX-1102) показан на рис. 25.12.
осле
ввода указанных данных ПИ находится в
дежурном режиме. При появлении над
горизонтом навигационного спутника ПИ
принимает его сигналы, синхронизируется
ими, выделяет из них орбитальную
информацию, измеряет навигационные
параметры, обрабатывает результаты
измерений, решает навигационную задачу
и выдаёт результат. Пример выдачи
информации на дисплее (приёмоиндикатор
МX-1102) показан на рис. 25.12.
25.4. ИСПОЛЬЗОВАНИЕ СПУТНИКОВЫХ РНС НА СРЕДНЕВЫСОКИХ
ОРБИТАХ
25.4.1. Общие сведения о спутниковых РНС на средневысоких орбитах
Наличие существенных ограничений в использовании СНС доплеровского типа – возможная относительно большая дискретность в обсервациях, а так же недостаточная в ряде случаев точность определения места, обусловленная в первую очередь погрешностями в знании вектора истинной скорости судна и высоты антенны ПИ над уровнем опорного референц-эллипсоида и др. вызвали необходимость создания более совершенных спутниковых навигационных систем. Такие системы созданы на средневысоких орбитах и в настоящее время широко используются на морских и речных судах. Такие СНС непрерывного действия являются системами глобального высокоточного определения координат, скорости, направления и ориентации объекта в пространстве. Определение пространственных координат и составляющих скорости основывается на дальномерных и доплеровских измерениях сигналов, принятых со спутников.
На данный момент существуют две глобальные спутниковые радионавигационные системы второго поколения. Это российская система ГЛОНАСС (глобальная навигационная спутниковая система) и американская, называемая НАВСТАР (Navstar – Navigation Satellite Time and Ranging) или по её фактическому назначению GPS (Global Positioning System). Принципы работы этих систем одинаковы. Основные свойства обеих СНС определяются выбором системы навигационных ИСЗ (баллистическим построением), высокой стабильностью бортовых эталонов частоты, выбором сигналов и способов его обработки, а также способами устранения и компенсации погрешностей.
В состав обеих СНС входят:
сеть навигационных ИСЗ;
наземные средства управления, слежения и контроля;
навигационная аппаратура потребителей;
средства развёртывания и восполнения системы (космодром).
Сеть навигационных ИСЗ развёртывается из 18-24 спутников, скоординировано обращающихся по круговым орбитам высотой около 20 000 км. Система спутников представляет собой совокупность источников навигационных сигналов, передающих одновременно значительный объём служебной информации. В навигационном сигнале каждого спутника передаётся два типа информации:
аналоговая – измеряемые псевдодальность, псевдоскорость, а так же метки времени;
цифровая (служебная) – кадры эфемеридной информации и кадры альманаха.
В командно-измерительный комплекс входят:
- станции контроля, которые ведут траекторные и временные измерения для определения и прогнозирования пространственного положения спутников и расхождении их шкал времени с временной шкалой системы, а так же собирают телеметрическую информацию о состоянии бортовых систем;
- центр управления системой, собирающий информацию от станций контроля, формирующий массив служебной информации (альманах, эфемериды, частотно временные поправки) и программу управления бортовыми средствами;
- станции управления, закладывающие в бортовые запоминающие устройства служебную информацию и программу управления, а так же ведущие оперативное управление работой бортовых средств каждого из спутников.
Приёмоиндикаторы (ПИ), которые являются аппаратурой потребителей, предназначены для определения пространственных координат и параметров движения объекта по результатам измерений. По сложности технических решений и объёму аппаратных затрат ПИ разделяют на:
- одноканальные (в том числе мультиплексные, когда система очень быстро переключается между сигналами орбитальной группировки), которые в каждый текущий момент времени ведут приём и обработку радиосигнала только одного навигационного ИСЗ;
- многоканальные, позволяющие одновременно принимать и обрабатывать сигналы нескольких ИСЗ.
В мультиплексной аппаратуре резко снижаются аппаратурные погрешности, характерные для многоканальной аппаратуры, что позволяет производить измерения направлений. Так, если установить на потребителе две или более антенны на некоторой базовой линии, то можно измерять азимут, измеряя разность фаз несущей частоты сигналов, принимаемых антеннами.
Средства развёртывания и восполнения системы (космодром) обеспечивают вывод на орбиты спутников при первоначальном развёртывании сети навигационных ИСЗ и при её восполнении.
Решение навигационных задач основывается на использовании функциональной связи между навигационными параметрами и определяемыми координатами. Навигационные параметры – это те величины, которые измеряются непосредственно во время сеанса связи.
Если задать геоцентрическую экваториальную прямоугольную систему координат (начало отсчёта в центре Земли) и обозначить координаты ИСЗ и ПИ соответственно xC, yC, zC и x, y, z, то расстояние между ними выразится как
![]() .
.
Радиальная скорость может быть найдена путём дифференцирования этого уравнения по времени:
![]()
где
![]() и
и
![]() – частные производные соответствующих
координат ИСЗ и ПИ.
– частные производные соответствующих
координат ИСЗ и ПИ.
Величины, входящие в эти два уравнения должны относиться к одному моменту времени. Так, если бортовая шкала ПИ привязывается к временной метки с ИСЗ, то для расчёта координат ПИ, соответствующих измерениям в момент tи по бортовой шкале, координаты спутника следует брать для момента (tи – | r | / с),
где с – скорость распространения радиоволн.
Поскольку в спутниковой РНС с ИСЗ на средневысоких орбитах применяется дальномерный метод с хранением начала отсчёта, то измеряемая псевдодальность будет отличаться от истинной дальности на величину, зависящую от смещения относительно системного времени как временной шкалы ИСЗ dtc, так и временной шкалы ПИ dtп (см. подразделы 21.1.2 главы 21 и 25.2 главы 25). Кроме того, при распространении радиоволн в атмосфере возникает задержка сигнала dtA по сравнению с его временем распространения в свободном пространстве. Поэтому, на самом деле, в навигационном сеансе измеряется не дальность r, а псевдодальность rПС, выражение для которой будет выглядеть так:
![]() ,
где i
= 1,…,4.
,
где i
= 1,…,4.
Из этого выражения видно, что определяемыми параметрами являются координаты x, y, z и поправка dtп к временной шкале ПИ. Значения остальных пяти величин должны быть вычислены потребителем на основании служебной информации, передаваемой каждым спутником.
При доплеровских измерениях радиальной скорости поступают подобным образом: т.е. измеряется только псевдоскорость. Следовательно, определяемыми параметрами являются 3 составляющих вектора скорости (направленных по координатным осям) и поправка по частоте к генератору частоты.
ПИ принимает излучаемые каждым ИСЗ радиосигналы и производит измерения радионавигационных параметров, т.е. определяет по два навигационных параметра от каждого спутника: псевдоскорость и псевдо-дальность. Так, как для точного определения координат и скоростей необходимо, чтобы в решаемой системе было не менее четырёх уравнений для псевдодальности, и столько же для псевдоскорости, следовательно, число спутников, находящихся в орбитальной группировке должно быть не менее четырёх (см. подразделы 21.1.2 главы 21 и 25.2 главы 25). Переход от прямоугольных координат x, y, z к географическим , осуществляется по известным формулам геодезии.
При меньшем числе видимых или функционирующих ИСЗ определение координат и скорости можно производить с помощью ЭВМ, пользуясь статистическими методами обработки измерений, такими, как метод наименьших квадратов, или метод динамической фильтрацией (Кальмана). Применение статистических методов обработки возможно из-за достаточно быстрого изменения навигационных параметров, так как одной из основных особенностей среднеорбитальных СНС является высокая скорость относительного перемещения ИСЗ и потребителя.
Точность определения места. Ошибка определения места по трём ИСЗ на поверхности Земли может быть рассчитана по приближённой формуле мореходной астрономии
![]() ,
,
где hcp – средняя угловая высота спутников;
А – разность азимутов меду парами ИСЗ;
mp – СКО определения расстояния.
Выражение
![]() характеризует геометрические условия
наблюдений и называется геометрическим
фактором
(Geometric Delution of Precision – GDOP или Horizontal
Delution of Precision – HDOP). В процессе приёма
сигналов ИСЗ их геометрическое положение
непрерывно меняется: ряд ИСЗ уходит за
горизонт, другие появляются из-за
горизонта. В морских ПИ решается задача
выбора из общего числа ИСЗ, обработка
сигналов которых обеспечивает минимальное
значение геометрического фактора
(минимальное значение ошибки определения
места).
характеризует геометрические условия
наблюдений и называется геометрическим
фактором
(Geometric Delution of Precision – GDOP или Horizontal
Delution of Precision – HDOP). В процессе приёма
сигналов ИСЗ их геометрическое положение
непрерывно меняется: ряд ИСЗ уходит за
горизонт, другие появляются из-за
горизонта. В морских ПИ решается задача
выбора из общего числа ИСЗ, обработка
сигналов которых обеспечивает минимальное
значение геометрического фактора
(минимальное значение ошибки определения
места).
При работе по трём ИСЗ Г = min, если все три ИСЗ размещены одинаково низко над горизонтом, образуя равносторонний треугольник (разность азимутов А 120). При этом Г = 1,45.
При работе по четырём ИСЗ Г = min = 2,6, если один ИСЗ в зените, а остальные три будут иметь одинаковую высоту около 30, образуя равносторонний треугольник в плоскости расположения ИСЗ. При этом объём тетраэдра, образованного направлениями от судна на ИСЗ, будет максимальным (рис.25.13).
Геометрический фактор нужен для оценки точности обсерваций. Ошибка обсервации пропорциональна величине геометрического фактора (рис. 25.14).

Чем он меньше, тем место определено более точно. Величина геометрического фактора вычисляется при обсервациях: один раз в течение 5…10 мин. Текущее значение геометрического фактора сравнивается с его оптимальным значением, заложенным в программу выбора созвездия спутников, или установленным самим судоводителем. Для точных обсерваций должно быть 1,5 Г 5. При Г 10 место получается менее точно. В некоторых ПИ, например «Shipmate GPS Navigator RS5700» точность обсерваций показывается на дисплее буквами: А (высокая точность), В (хорошая точность) и D (плохая точность).
Точность определения расстояния зависит от следующих факторов: нестабильности шкалы времени ИСЗ; ошибок в орбитальной информации; нестабильности шкалы времени ПИ; влияния ионосферы и тропосферы; шумов аппаратуры ИСЗ; шумов аппаратуры ПИ; многолучёвости распространения радиоволн.
Суммарная средняя квадратичная ошибка получается порядка 16 м. Например, если = 16 м, Г = 1,45, то М = m Г = 23 м, предельная ошибка при Р = 95% равна 46 м.
25.4.2. Принципы, положенные в основу построения GPS
Прежде, чем перейти к пояснению работы СНС НАВСТАР и ГЛОНАСС, подытожим пять наиболее важных идей, которые легли в основу работы GPS. Более подробно см. предыдущие подразделы 21.1.2 главы 21 и 25.1, 25.2, 25.4.1 главы 25.
Идея первая:
GPS основана на определении координат местоположения по расстояниям до спутников. Это означает, что наши координаты на Земле вычисляются на основе измеренных системой расстояний до группы спутников в космосе. Спутники выполняют роль точно координированных точек отсчета.
Для определения местоположения необходимо провести четыре измерения. Трех измерений достаточно, если исключить неправдоподобные решения. Еще одно измерение требуется по техническим причинам, которые будут рассмотрены ниже.
Идея вторая:
Как уже отмечалось ранее, GPS работает, измеряя время, за которое радиосигнал доходит от спутника до ПИ, а затем по этому времени вычисляется расстояние.
Радиоволны распространяются со скоростью света: 300 000 км/с. Если точно определить момент времени, в который спутник начал посылать свой радиосигнал, и момент получения его, то мы точно будем знать время его распространения. И тогда, умножая скорость распространения сигнала на время в секундах, получим расстояние до спутника.
Естественно, что у потребителя навигационной информации часы должны быть весьма точны, так как радиоволны распространяются непостижимо быстро. Например, если бы спутник находился прямо над нашим судном, то потребовалось бы всего около 0,06 секунды для прохождения радиосигнала от спутника до судна. Поэтому GPS строится с применением совершенного способа измерения времени, основанного на атомном стандарте частоты, который обеспечивает ход бортовых часов спутника с наносекундной точностью. А это 0,000000001 секунды!
Главной трудностью при измерении времени прохождения радиосигнала является точное выделение момента времени, в который сигнал передан со спутника. Для этого разработчики GPS обратились к разумной идее: синхронизировать спутники и приемники так, чтобы они генерировали один и тот же код точно в одно и то же время.
Далее, принятый код от спутника сравнивается со сгенерированным в приёмнике таким же кодом. Выявленный таким образом сдвиг одного кода по отношению к другому будет соответствовать времени прохождения сигналом расстояния от спутника до приемника. Преимуществом использования кодовых посылок (кодовых последовательностей) является то, что измерения временного сдвига могут быть проведены в любой момент времени.
Как спутники, так и приемники генерируют очень сложные цифровые кодовые последовательности. Коды усложняются специально, чтобы их можно было бы надежно и однозначно сравнивать, а также по некоторым другим причинам. Так или иначе, коды настолько сложны, что они выглядят как длинный ряд случайных импульсов. В действительности они являются тщательно отобранными «псевдослучайными последовательностями», которые повторяются каждую миллисекунду.
Идея третья: Обеспечение совершенной временной привязки.
Если спутник и приемник имеют расхождение шкал времени (выходят из синхронизации) даже на 0,01 с, то измерение расстояния будет произведено с ошибкой в 2993 км!
Для этого на борту спутников устанавливаются высокоточные атомные часы в количестве 4 комплектов. На судне установка таких хранителей времени достаточно сложная и дорогостоящая задача. Поэтому применяется способ измерения расстояния по псевдодальностям, который состоит в том, чтобы произвести измерение дальности еще до одного спутника. Не вызывает сомнений, что если три точных измерения определяют положение точки в трехмерном пространстве, то четыре неточных позволят исключить относительное смещение шкалы времени приёмника.
Указанный принцип применительно для плоскости (двухмерного пространства) более подробно изложен в подразделе 21.1.2 главы 21.
При обработке ошибочных сигналов компьютер приёмника начинает вычитание (или прибавление) некоторого (одного и того же для всех измерений) интервала времени к измеренным им псевдодальностям. Он продолжает корректировать время во всех измерениях до тех пор, пока не найдёт решение, которое «проводит» все окружности через одну точку.
Из сказанного следует, что при трехмерном определении места (т.е. при одновременном определении трех координат - долготы, широты и высоты точки над принятым в расчетах земным эллипсоидом) необходимо выполнить четыре измерения (в двухмерном – три), чтобы исключить погрешность временной привязки часов приемника к единому системному времени.
Необходимость в 4-х измерениях самым существенным образом сказывается на проектировании GPS-приемников. Если необходимо выполнять непрерывное определение места в реальном масштабе времени, то следует использовать приёмник, имеющий, по крайней мере, четыре канала измерений. То есть такой, у которого с каждым из четырех спутников постоянно работает отдельный канал приема и первичной обработки сигналов.
Тоже самое относится и к измерению скоростей (псевдоскоростной способ измерения скорости).
Идея четвертая: спутника в космическом пространстве.
До сих пор во всех наших рассуждениях мы принимали, что знаем точно, где в космическом пространстве находятся спутники и, исходя из этого, можно точно вычислить местоположение судна по их координатам и расстояниям до них. Для того чтобы узнать, где точно в космическом пространстве располагаются ИСЗ, двигающиеся с большой скоростью и удаленные на расстоянии порядка 18000 км, орбитальное движение ИСЗ вокруг Земли описываться математическими формулами. Т.е. орбиты известны заранее, а приемники имеют «альманах», размещаемый в памяти их компьютеров, из которого известно, где будет находиться каждый спутник в любой момент времени.
Чтобы сделать систему более совершенной движение спутников GPS находится под постоянным контролем специальных наземных станций слежения. Обращаясь вокруг планеты один раз за 12 часов, спутники GPS проходят над контрольными станциями дважды в сутки. Это дает возможность точно измерять их высоту, положение и скорость.
После того, как станции определили параметры движения спутника, они передают эту информацию обратно на спутник, заменяя ею в памяти бортового компьютера прежнюю. Далее эти небольшие поправки вместе с дальномерными кодовыми сигналами непрерывно передаются спутником на Землю.
Спутники GPS передают не только псевдослучайный дальномерный код, но также и информационные сообщения о своем точном положении на орбите и о состоянии своих бортовых систем.
Все виды приемников GPS используют эту информацию вместе с информацией, заключенной в альманахе, для того, чтобы установить точное положение каждого спутника в космическом пространстве.
Идея пятая: Ионосферные и атмосферные задержки сигналов.
Как бы ни была совершенна система GPS, существуют два источника погрешностей, которые очень трудно избежать. Наиболее существенные из этих погрешностей возникают при прохождении радиосигналом ионосферы Земли – слоя заряженных частиц на высоте от 120 до 200 км. Эти частицы существенным образом влияют на скорость распространения радиосигналов GPS. А это делает невозможным точное вычисление расстояний до спутников, поскольку они построены на предположении о том, что скорость распространения радиоволн строго постоянна.
Для того чтобы сделать такие ошибки, связанные с распространением радиоволн, минимальными, используются два метода.
Во-первых, можно вычислить каково будет типичное изменение скорости при средних ионосферных условиях, а затем ввести поправку во все измерения.
Другой способ состоит в сравнении скоростей распространения двух сигналов, имеющих разные частоты несущих колебаний.
Таким образом, если сравнить время распространения двух разночастотных компонент сигнала GPS, то можно вычислить изменение скорости распространения радиоволн. Этот метод корректировки достаточно сложен и используется только в наиболее совершенных, так называемых «двухчастотных» приемниках GPS.
После того, как сигналы GPS пересекли ионосферу, расположенную очень высоко, они входят в атмосферу, в которой происходят все погодные явления. Водяные пары в атмосфере также могут влиять на радиосигналы. Ошибки по величине схожи с ошибками, вызываемыми ионосферой, но их почти невозможно скорректировать. Их суммарный вклад в погрешность местоположения незначительный.
Другие виды погрешностей.
Как бы точны ни были атомные часы на спутниках, все же и у них имеются источники небольших погрешностей. Специальные станции следят за этими часами и выверяют их, если выявится незначительный уход.
Судовые ПИ так же могут быть источниками ошибок. Компьютер приемника может округлить математическую операцию, или электрические помехи могут привести к ошибочной обработке псевдослучайных кодов.
Еще один тип погрешностей - это ошибки "многолучевости". Они возникают, когда сигналы, передаваемые со спутника, многократно переотражаются от окружающих предметов и поверхностей до того, как попадают в приёмник.
Все источники погрешностей суммируются и придают каждому измерению GPS некоторую неопределенность.
Геометрический фактор (см. подраздел 25.4.1).
Для достижения наибольшей точности в приемнике GPS учитывается своеобразный геометрический принцип, названный "Geometric Dilution of Precision - GDOP" (геометрический фактор снижения точности).
Суть его состоит в том, что в зависимости от взаимного расположения спутников на орбите геометрические соотношения, которыми характеризуется это расположение, могут многократно влиять на увеличение или уменьшение точности измерений.
Наличие областей неопределенности означает, что мы не можем больше считать, что находимся в четко определенной точке. Можно лишь сказать, что мы где-то внутри этой суммарной области неопределенности. Исходя из этого, приемники снабжают вычислительными процедурами, которые анализируют относительные положения всех доступных для наблюдения спутников и выбирают из них четырех кандидатов, т.е. наилучшим образом расположенные четыре спутника.
Точность GPS
Результирующая погрешность GPS определяется суммой погрешностей от различных источников. Вклад каждого из них варьируется в зависимости от атмосферных условий и качества оборудования. Кроме того, точность может быть целенаправленно снижена Министерством обороны США в результате установки на спутниках GPS так называемого режима SA ("Selective Availability"- ограниченный доступ). Этот режим разработан для того, чтобы не дать возможному противнику тактического преимущества в определении местоположения с помощью GPS. И если этот режим установлен, он создает наиболее существенную компоненту суммарной погрешности GPS.
25.4.3. Спутниковая навигационная система НАВСТАР
В 1973 г. в США было принято решение разработать СНС нового поколения, лишенную недостатков системы «Навсат» (см. подраздел 25.3 настоящей главы) и предназначенную для обеспечения непрерывной и высокоточной навигационной информацией (время, три пространственные координаты: широта, долгота, высота, вектор скорости объекта, заданный тремя своими проекциями) неограниченного количества потребителей в любой точке земного шара. Проект получил название GPS (Global Positioning System) или NAVSTAR (Navigation Satellite Time and Ranging). В феврале 1978 г. был запущен первый экспериментальный спутник GPS.
На самом же деле она была разработана по заказу ВМФ США для использования сети спутников, предназначавшихся для американской программы "звёздных войн". Самые современные на тот момент радионавигационные системы: наземные «Loran-C», «Omega» и спутниковая РНС «Transit» перестали удовлетворять требованиям военных в отношении точности, всепогодности, круглосуточной работы и зоны охвата
О гражданском применении GPS широко заговорили в 1983 г. после катастрофы южнокорейского авиалайнера, сбитого над Курильскими островами. В начале 90-х годов систему было разрешено использовать в гражданских целях. Услуги системы GPS предоставляются по всему миру бесплатно и всё, что нужно для её использования - соответствующий приёмник.
Система GPS предоставляет два вида услуг: SPS - стандартной точности (для гражданских пользователей) и PPS - высокой точности (для военных). При разработке системы, точность SPS в 100 м считалась достаточной для гражданских целей. По мере испытаний оказалось, что подсистема SPS точнее, чем предполагалось. Для сохранения преимущества высокой точности для военных, с марта 1990 г. был введен режим «ограничения доступа» SA (Selective Availability), искусственно снижающий точность гражданского GPS. В мае 2000 года эти ограничения были сняты и теперь для современных гражданских 12-канальных приемников средняя точность измерений составляет 15м.
Система основана на вычислении расстояния от пользователя до спутника по измеренному времени от передачи сигнала спутником до приема этого сигнала пользователем. Пользователю не требуется иметь точные часы, поскольку измеряется расстояние до четырех спутников и по данным этих измерений вычисляются не только три координаты, но и уход часов пользователя. В СНС НАВСТАР используются также доплеровские методы измерения НП в целях определения вектора скорости объекта.
Боевое крещение система получила в ходе операции «Буря в пустыне». К тому времени еще не было запущено достаточно спутников. Потребовалось маневрировать имеющимися, для обеспечения круглосуточного покрытия зоны боевых действий. Интересно, что в сентябре 1989 г. фирма «MAGELLAN SYSTEMS CORP» выпустила приемник GPS –«NAV-1000M» - для применения в военных целях, и была выбрана 10 странами-членами НАТО в качестве поставщика приемников. Более 3000 приемников типа «NAV-1000M» наряду с прочими использовались США и Силами Коалиции во время войны в Персидском заливе. Сухопутные подразделения и морская пехота были тогда, в основном, укомплектованы носимыми одноканальными приемниками, аналогичными гражданским, и не способными принимать сигналы высокой точности. Было решено отключить на время боевых действий режим SA, что давало возможность пользования высокой точностью также и противнику.
К середине 1993 г. на орбитах находились уже 24 спутника, что достаточно для непрерывной навигации в любой точке Земли. Об окончательном вводе системы в эксплуатацию объявили только в июле 1995 г. В настоящее время СНС НАВСТАР развёрнута и введена в эксплуатацию как глобальная СНС, обеспечивающая непрерывное трёхмерное определение места.
В СНС НАВСТАР используется система координат WGS-84.
GPS является навигационным средством, и его использование не освобождает судоводителя от необходимости знать и использовать более традиционные методы навигации и управления судном.
Состав СНС НАВСТАР. Как и любая СНС (см. подраздел 25.1 настоящей главы), НАВСТАР состоит из трёх основных элементов:
- системы ИСЗ, используемых как навигационные ориентиры;
- наземного комплекса управления;
- бортовой аппаратуры потребителей навигационной информации (ПИ).
С
Рис. 25.15. Рабочее созвездие ИСЗ в СНС
НАВСТАР
П одобный
выбор параметров орбит ИСЗ позволяет
обеспечить в любой точке земного шара
приём радиосигналов не менее четырёх
спутников и тем самым р
одобный
выбор параметров орбит ИСЗ позволяет
обеспечить в любой точке земного шара
приём радиосигналов не менее четырёх
спутников и тем самым р ешить
задачу непрерывного глобального
навигационного обеспечения пользователей.
Кроме того, так как период обращения
ИСЗ системы равен половине синхронного,
то каждый спутник будет проходить над
одной и той точкой земной поверхности
через звёздные сутки. Благодаря этому,
в частности, отпадает принципиальная
необходимость разворачивать глобальную
сеть станций слежения за ИСЗ системы.
ешить
задачу непрерывного глобального
навигационного обеспечения пользователей.
Кроме того, так как период обращения
ИСЗ системы равен половине синхронного,
то каждый спутник будет проходить над
одной и той точкой земной поверхности
через звёздные сутки. Благодаря этому,
в частности, отпадает принципиальная
необходимость разворачивать глобальную
сеть станций слежения за ИСЗ системы.
Спутники движутся со скоростями около 11000 км/ч. Важным элементом спутника являются атомные часы, рубидиевые и цезиевые, по четыре на каждом. Спутники идентифицируются номером PRN (Pseudo Random Number), который отображается на приемнике GPS.
П
Рис. 25.16.
Спутники СНС НАВСТАР
с развёрнутыми солнечными батареями
Среднее время жизни каждого спутника GPS составляет около 10 лет. В связи с этим по мере необходимости производится замена старых спутников новыми. Масса спутника GPS составляет около 900 кг, а его ширина - около 5 м с развернутыми солнечными батареями (рис. 25.16).
Работа системы НАВСТАР.
В упрощенном виде работу системы GPS можно пояснить следующим образом. Спутники GPS вращаются вокруг Земли по круговым орбитам с частотой 2 оборота в сутки, передавая навигационные радиосигналы. GPS-приемники принимают эти сигналы и вычисляют местоположение методом триангуляции. Приемник сравнивает время излучения сигнала с временем приёма этого сигнала. Разность между этими величинами позволяет вычислить расстояние до спутника. Зная расстояние до нескольких спутников, GPS-приемник может определить свое местоположение и отобразить его на электронной карте (рис.25.17).
П
Рис. 25.17.
Отображение местоположения
спутника на электронной карте

скорость, путевой угол, траекторию, пройденное расстояние, расстояние до конечного пункта, время восхода и захода солнца и др.
В
Рис.25.18.
Измеренные истинная дальность и
псевдодальность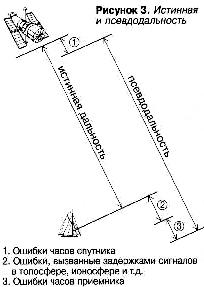

рис. 25.18, где 1 – ошибки часов спутника; 2 – ошибки, вызванные задержками сигналов в тропосфере, ионосфере и т.д.; 3 – ошибки часов приёмника.
Структура передаваемых сигналов спутниками СНС НАВСТАР. Все спутники СНС НАВСТАР излучают когерентные колебания на одинаковых частотах: f1 = 1575,42 МГц и f2 = 1227,6 МГц, кратными основной частоте часов спутника f0 = 10,23 МГц (154 и 120 гармоники частоты атомного стандарта колебаний, находящегося на борту каждого ИСЗ). При этом для аппаратурной реализации измерений псевдодальностей оба несущих колебания манипулированы по фазе по закону псевдослучайных двоичных цифровых последовательностей. Причём в качестве таких последовательностей используются так называемые М – последовательности, в которых число единиц и нулей может отличаться не более чем на один символ, что придаёт сигналу при кажущейся хаотичности чередования символов свойства широкополосного шума (рис.25.19). Псевдослучайный код содержит номер спутника (PRN).


Рис. 25.19. Псевдослучайный код (двоичный,
цифровой, состоящий из нулей и единиц)
На каждом ИСЗ формируется подобным образом 2 кодированных сигнала:
- код PPS – сигнал точного определения места, защищённый от несанкцио-нированного использования сторонними потребителями навигационной информации и позволяющий производить навигационные измерения высокой точности;
- код SPS – сигнал стандартного определения места, открытый для пользо-вания всеми потребителями навигационной информации и предназначенный для местоопределения пониженной точности.
Рассмотрим указанные сигналы более подробно.
Сигнал PPS имеет тактовую частоту 10,23 МГц и период используемой кодовой последовательности 267 суток. Поэтому, не зная установленного начального состояния этого кода, раскрыть его, а значит, и воспользоваться им для навигационных определений практически невозможно. Каждому спутнику выделяется свой индивидуальный семисуточный интервал этой последовательности, что позволяет идентифицировать его сигнал в бортовых ПИ среди всех прочих ИСЗ системы. В конце каждой недели начальное состояние кода на каждом ИСЗ устанавливается по командам наземного комплекса управления. В соответствии с кодом PPS производится манипуляция фазы 90 (от «1» до +90, от «0» до –90) колебаниями обеих частот f1 и f2, излучаемых спутниками. Для использования этого сигнала потребители навигационной информации должны предварительно засинхронизировать с высокой точностью свой эталон времени с единым временем системы НАВСТАР, а счислимое место объекта должно быть известно с точностью 2 – 3 мили.
Код SPS, являющийся по своей структуре кодом Голда, также устанавливается индивидуально для каждого спутника, но в отличие от PPS кода имеет существенно более короткий период равный 1 мс при тактовой частоте 1,023 МГц. В силу этого псевдодальномерные измерения с его использованием не вызывают затруднений даже в отсутствии априорной информации о местоположении объекта и о расхождении его эталона времени с временем системы НАВСТАР. Кроме того, кодом SPS каждые 6 с передаётся ключевое слово HOW, указывающее текущую фазу (состояние) PPS кода. Поэтому в бортовых ПИ, имеющих дешифратор слова HOW (допущенных к использованию навигационной информации повышенной точности), можно осуществить достаточно быстрое вхождение в код PPS. Фазовая манипуляция в соответствии с SPS кодом осуществляется только на одной несущей частоте f1 = 1575,42 МГц изменением фазы на 0, 180.
В целях восстановления в бортовых ПИ вектора местоположения спутника в пространстве на моменты измерения НП каждый спутник транслирует на тех же частотах f1 и f2 своё навигационное сообщение. Для передачи его также используется фазовая манипуляция частот f1 и f2 со скоростью 50 двоичных знаков информации в секунду.
Кадр навигационного сообщения содержит 1500 битов информации, передаётся в течение 30 сек и разбит на 5 подкадров, в каждом из которых содержится 10 слов по 30 битов.
В первом подкадре передаются данные телеметрического контроля, метки времени, параметры, используемой модели ионосферной рефракции, параметры коррекции шкалы времени данного ИСЗ.
Второй и третий подкадры отведены под эфемеридную информацию, позволяющую рассчитать местоположение ИСЗ на момент измерения НП. Эфемериды - это данные об исправности спутника и параметры его орбиты - коэффициенты, с помощью которых приемник вычисляет текущее и будущее положение спутника, используя математическую Кеплеровскую модель.
Четвёртый подкадр используется для передачи служебной информации.
Пятый подкадр содержит информацию об эфемеридах и коррекции часов всех ИСЗ системы – так называемый альманах спутников (хранится в памяти приёмника). Альманах имеет достаточно большой объём и поэтому передаётся в 25 кадрах.
Полный цикл передачи всего сообщения занимает 12.5 мин
Данные, содержащиеся в альманахе, позволяют осуществить быстрый поиск и захват сигналов рабочего созвездия из четырёх ИСЗ, обеспечивающего минимальное значение геометрического фактора, после приёма сигналов любого из спутников системы НАВСТАР.
Наземный комплекс управления СНС НАВСТАР решает в целом те же задачи, что и в СНС «Транзит», а именно: контроль за работой ИСЗ системы, слежение за спутниками и прогнозирование местоположений их на орбитах, закладка эфемеридной и служебной информации на ИСЗ, формирование единой шкалы времени СНС НАВСТАР и её синхронизация относительно шкалы UTC.
Наземная часть GPS состоит из 4 станций слежения, расположенных на тропических островах. Они отслеживают видимые спутники и передают данные (эфемериды) на Главную станцию управления и контроля (MCS) на авиабазе в Колорадо-Спрингс для обработки на сложных компьютерных программных моделях. Через наземные станции данные передаются обратно на спутники, а затем спутник передает их приемникам GPS.
Бортовая аппаратура потребителей навигационной информации СНС НАВСТАР обеспечивает:
выбор из всей совокупности видимых ИСЗ рабочего созвездия оптимальной пространственной конфигурации, обеспечивающего минимальное значение геометрического фактора и, следовательно, минимальные геометрические погрешности определения места;
поиск и слежение за радиосигналами ИСЗ, измерение РНП: времени задержки на трассе распространения и доплеровского сдвига частоты;
выделение из радиосигнала необходимой эфемеридной и служебной информации;
обработка полученных данных с целью расчёта координат и вектора скорости объекта, а также отклонения бортовой шкалы времени относительно шкалы времени НАВСТАР;
решение ряда дополнительных задач для обеспечения навигации по заданному маршруту движения;
индикация полученных результатов удобной для судоводителя форме.
В зависимости от требований к точности навигационного определения различных объектов, их динамических свойств в СНС НАВСТАР существуют различные типы бортовой аппаратуры (более подробно о различных типах приёмников GPS изложено подразделе 25.5 настоящей главы). Самые сложные из них и дорогостоящие выполняются по многоканальной схеме для одновременного слежения за радиосигналами нескольких ИСЗ рабочего созвездия. Наиболее распространённый для целей морского флота – вариант построения бортового ПИ, имеющего один приёмный канал, позволяющий производить радионавигационные измерения по четырём спутникам последовательно, а также использующий только одну из рабочих частот ИСЗ и код SPS стандартного определения места.
Процессы, происходящие в аппаратуре этого типа, протекают в общих чертах следующим образом (рис. 25.20).
После выбора на основании принятого альманаха оптимального созвездия ИСЗ осуществляется захват сигнала одного из них. На следующем этапе при измерениях РНП в генераторе кода бортовой аппаратуры формируется точная копия индивидуального кода SPS данного ИСЗ, привязанная к шкале времени бортового ПИ и управляющая работой фазового демодулятора ФМД приёмника. ФМД инвертирует фазу принимаемых колебаний ИСЗ при поступлении на него с генератора кода символа «1» и оставляет её без изменения при поступлении символа «0».
Таким образом, при совпадении во времени кода принимаемого сигнала и кода, сформированного в ПИ, на выходе ФДМ будет наблюдаться немодулированное колебание несущей частоты, излучаемой спутником, из которого с использованием схемы доплеровского следящего фильтра выделяется один из искомых РНП – доплеровский сдвиг частоты. При точном совпадении частот генератора, управляемого напряжением следящего фильтра ГУН, и принимаемой от ИСЗ на выходе фазового детектора ФД1, управляющее напряжение будет равно нулю, в то время как на выходе фазового детектора ФД2 оно достигнет максимального значения, что в конечном итоге вызовет срабатывание обнаружителя и будет сигнализировать о наличии синхронизма в измерительном канале ПИ. В этом случае схема управления временным положением кода прекратит выработку управляющего напряжения на сдвиг во времени кодовой последовательности, вырабатываемой генератором кода относительно меток времени шкалы ПИ. В режиме синхронизма в измерителе псевдодальности определяется временное рассогласование между метками времени бортового ПИ, отличающегося от времени НАВСТАР на неизвестную пока систематическую погрешность, и метками времени, выделяемыми в конечном итоге из принимаемого сигнала ИСЗ и несущими информацию о дистанции ИСЗ – судно. Результат этих измерений пропорционален мгновенному значению НП – псевдодальности до данного ИСЗ.

Рис. 25.20. Упрощённая функциональная
схема одноканального приёмного
устройства
СНС НАВСТАР
В дальнейшем приёмное устройство на основании эфемеридной информации из альманаха ИСЗ под управлением ЭВМ комплекса перестраивается на поиск сигнала следующего спутника рабочего созвездия, и процесс измерения НП повторяется.
После измерения четырёх псевдодальностей и четырёх псевдорадиальных скоростей и приведения разновременных определений НП к одному месту (зениту) решается ОНЗ с целью определения трёх пространственных координат объекта, вектора его скорости и расхождения временных шкал СНС НАВСТАР и бортового ПИ.
В дальнейшем, если это предусмотрено в данном типе бортовой аппаратуре, осуществляется переход на работу с кодом PPS точного определения места с использованием ключевого слова HOW кода SPS.
Погрешности ионосферной рефракции компенсируются известными методами при двухчастотной обработке сигналов ИСЗ, либо предвычисляются и исключаются в одноканальных ПИ с использованием модели ионосферы.
Точность определения места по СНС НАВСТАР. Следует отметить, что вопросы точности измерения можно рассматривать только в тех случаях, когда обеспечен устойчивый приём сигналов спутников. Так как принцип действия GPS основан на приёме сигналов со спутников, очевидно, что приёмник не будет работать под водой, под землей и в закрытых помещениях. Уменьшить точность могут также задержки сигнала в верхних слоях атмосферы, отражения сигнала от местных предметов и неблагоприятная геометрия размещения видимых спутников. Погода и время суток не влияют на качество приёма сигналов.
Имея сигнал трёх спутников, приёмник может определить только широту и долготу, т.е. двухмерные координаты. Принимая сигналы от большего числа спутников, приёмник уже может определить и высоту, и скорость, и направление движения. Чем больше спутников «видит» приёмник, тем точнее будут данные измерений. GPS спроектирована таким образом, что в любой точке Земной поверхности можно принимать сигнал не менее чем с четырех спутников.
Первоначально точность гражданских сигналов GPS была искусственно занижена (режим SA) и определить координаты с точностью выше 100м было невозможно. В мае 2000 года эти ограничения были сняты и теперь для современных гражданских 12-канальных приемников средняя точность измерений составляет 15м.
Точность можно увеличить путем введения дифференциальных поправок, передаваемых либо с геостационарных (не меняющих свое положение относительно поверхности земли) спутников или с помощью сети радиомаяков DGPS. Последний способ применяется в судовождении. Большинство моделей GPS-приёмников поддерживают подключение к ним DGPS-приёмников для автоматического уточнения измерений. Более подробно работа СНС НАВСТАР в дифференциальном режиме рассмотрена ниже.
Наиболее перспективные источники дифференциальных поправок – глобальные дифференциальные подсистемы, передающие поправку к сигналам GPS с геостационарных спутников. За их использование не предусмотрено какой-либо платы. К ним относятся американская система WAAS, европейская EGNOS и японская MSAS. Они улучшают точность определения местоположения GPS-приемниками до 1-3 м.
Американская система WAAS уже работает. В настоящее время зона покрытия этой системы - территория Северной Америки. Большое число моделей GPS-приемников GARMIN могут использовать дифпоправку WAAS при вычислении местоположения без какого-либо дополнительного оборудования.
Вертикальная точность примерно в 1,5 раза хуже горизонтальной, что связано с геометрией спутника. (Спутники чаще находятся рядом с горизонтом, чем прямо над ПИ).
Американская фирма «Trimble Navigation», известная как мировой разработчик и изготовитель спутниковых ПИ, даёт следующий список ошибок для коммерческих навигационных приёмников:
Ошибка часов спутника 0.6 м ( ч).
Эфемеридная ошибка 0,6 м ( э).
Ошибка приемника 1,2 м ( пр).
Атмосферная/ионосферная 3,7 м (распр).
Избирательная доступность 7,6 м (дост).
Полная
=
![]() 4,5 м - 9,0 м (без режима SA).
4,5 м - 9,0 м (без режима SA).
Прогнозируемая точность рассчитывается путем умножения приведённого выше числа на GDOP (геометрический фактор), который обычно находится в пределах от 4 до 6. Это даёт точность порядка 30 метров.
Точность определения составляющей вектора скорости -– 0,2 м/сек.
Упомянутая точность относится к одночастотным навигационным приёмникам, которые способны измерять положение раз в секунду или около того.
Точные измерения достигаются с помощью гораздо более сложного оборудования, которое используется в геодезии и топографии. Эти системы используют обе частоты и различные измерения, сравнивают данные от движущегося приемника с данными от неподвижного приёмника в известной точке. Они также усредняют результаты измерений за период времени. В этих измерениях в действительности с большой точностью определяется разница в положениях фиксированного и движущегося приёмников, а не абсолютное положение любого из них.
Избирательная доступность СНС НАВСТАР. Избирательная доступность – это преднамеренное ухудшение точности определения места по СНС с целью не дать потребителю воспользоваться полной точностью GPS с тактическими целями. На начальном этапе эксплуатации GPS был включен так называемый режим SA (Selective Availability). Военные приёмники использовались зашифрованным PPS кодом для получения заданной точности вне зависимости от состояния режима SA. Точность определения места для гражданских пользователей была не выше 100 м.
Режим SA выключался только во время вторжения американских войск на Гаити в основном потому, что военные не имели достаточного количества военных приёмников.
В начале февраля 1996 года правительство США приняло закон, который потребовал от военных выключить режим SA к 1 мая 1996 года. Первый законопроект, в который был включен этот пункт, не прошел, но он был включен в другой законопроект, который был подписан президентом.
В мае 2000 года эти ограничения были сняты.
Система GPS принадлежит Министерству обороны США и её гражданский сегмент может быть отключен как полностью, так и по регионам при наличии угрозы национальной безопасности США, о чем неоднократно официально заявлялось.
В каждом руководстве к приёмнику GPS имеется предупреждение о том, что, используя приёмник для навигации, пользователь должен всегда быть готов ориентироваться без GPS, в связи с тем, что производители снимают с себя ответственность за любые последствия отказов их устройств и\или системы GPS.
25.4.4. Спутниковая навигационная система ГЛОНАСС
С реднеорбитальная
космическая навигационная система
ГЛОНАСС (Россия) предназначена для
навигационного обеспечения гражданских
морских судов и самолётов, определения
координат указанных потребителей в
любом районе Земной поверхности
независимо от времени суток и метеоусловий.
СНС ГЛОНАСС аналогична по своим
характеристикам и возможностям СНС
НАВСТАР.
реднеорбитальная
космическая навигационная система
ГЛОНАСС (Россия) предназначена для
навигационного обеспечения гражданских
морских судов и самолётов, определения
координат указанных потребителей в
любом районе Земной поверхности
независимо от времени суток и метеоусловий.
СНС ГЛОНАСС аналогична по своим
характеристикам и возможностям СНС
НАВСТАР.
По проекту до состава системы входит 24 ИСЗ, которые должны находиться в трёх орбитальных плоскостях с углом наклона 64,8, на высоте 19100 км (см. рис. 25.21).
Навигационные ИСЗ системы ГЛОНАСС излучают два вида радиосигналов: сигнал стандартной точности (СТ) и сигнал высокой точности (ВТ). Сигнал СТ обеспечивает потре-бителей определением следующих параметров:
- плановых координат – 28 м;
- высоты – 60 м;
- определение составляющей вектора скорости -– 0,2 м/сек;
- временем – 700 наносекунд.
В связи с выбранным наклоном орбит система ГЛОНАСС потенциально превышает по своим характеристикам систему GPS в приполярных широтах.
В системе ГЛОНАСС реализовано частотное разделение сигналов каждого навигационного ИСЗ. Каждый спутник ГЛОНАСС использует две несущие частоты в диапазоне L, которые в отличие от GPS имеют различные частоты для каждого спутника. Диапазон L1 охватывает от 1602,5625 МГц до 1615,5 МГц с шагом 0,5625 МГц (для гражданских потребителей), а диапазон L2 охватывает от 1246,4375 до 1256,5 МГц с шагом 0,4375 МГц. Таким образом, генерируются 24 частотных канала для каждого диапазона. Каждый из этих сигналов модулирован: частота модуляции 5,11 МГц для точного кода и 0,511 для грубого кода. На L1 сигналы кодируются по точному и грубому коду, на L2 – только по точному коду. Точный код представляет собой псевдослучайную последовательность с периодом 1 сек., грубый код является псевдослучайной последовательностью с периодом 1 мсек. В отличие от GPS, где все коды уникальны для каждого спутника, в системе ГЛОНАСС для всех спутников используется единый код. Приёмники ГЛОНАСС, также как и приёмники GPS, вырабатывают такой же точный или грубый коды. Время передачи определяется путём измерения времени расхождения между кодом, полученным от спутника, и кодом который генерирует приёмник.
В настоящее время спутники, которые входят в состав системы ГЛОНАСС, функционируют не полностью, что создаёт определённые трудности для потребителей (ухудшение точности, разрывы в обслуживании). Использование этой системы в качестве самодостаточной системы является проблематичным. Система ГЛОНАСС не обеспечивает мгновенных предупреждений о неисправности системы.
На смену системы ГЛОНАСС в России разрабатываются космические навигационные системы ГЛОНАСС-М, ГЛОНАСС-К с улучшенными тактико-техническими характеристиками ИСЗ.
Сравнительные характеристики систем GPS и ГЛОНАСС приведены в табл. 25.3.
Табл. 25.3
Характеристика |
GPS |
ГЛОНАСС |
Количество ИСЗ Количество плоскостей орбит Наклон площадей орбит, град Радиус орбит, км Несущие частоты, МГц L1 L2 Точность определения (СКП) Плановых координат, м Высоты, м Скорости, м/с Времени, мкс Частота последовательности импульсов, МГц С/А Р Системное время Опорная система координат
|
24+3 (резервный) 6 55 20145
1575,42 1227,60
18 34 0,2 0,34
1,023 10,23 UTC(USNO) WGS-84 |
24+3 (резервный) 3 64.8 19100
1602,5625…1615,500 1246,4375…1256,500
14 30 0,15 0,7
0,511 5,11 UTC(SU) ПЗ-90 |
25.4.5. Дифференциальный режим работы GPS и ГЛОНАСС
Находящиеся в эксплуатации спутниковые навигационные системы GPS и ГЛОНАСС были одобрены IMO в качестве компонентов Всемирной радионавигационной системы. При одобрении систем GPS и ГЛОНАСС IМО отметила неспособность каждой из них обеспечить в штатном режиме точность, необходимую для безопасной навигации судов на подходах к портам и в других водах, в которых свобода маневрирования ограничена (точность определения места в таких районах по требованиям IMO должная составлять менее 10 м).
Другой отмеченный недостаток этих систем связан с их неспособностью в данное время обеспечивать оперативное оповещение потребителей о нарушениях в работе систем или их элементов, которые происходят пока довольно часто.
Наиболее рациональным путем устранения указанных недостатков и улучшения основных характеристик систем GPS и ГЛОНАСС, необходимых для расширения их функциональных возможностей, является применение дифференциального режима работы этих систем (DGPS), что позволяет добиться повышения точности, надежности и эффективности радионавигационного обеспечения в рабочих зонах дифференциальных подсистем СНС. Для этой цели, а также для обеспечения проведения геодезических работ, на берегу устанавливаются контрольные ПИ системы и передатчики для проведения коррекции измерений на судне в реальном масштабе времени. DGPS исключает ошибку, которую вносит избирательная доступность, и ошибки, вызываемые изменениями в ионосфере, что приводит к точности определения местоположения менее 10 метров. Реальная точность DGPS определений составляет 1 – 5 м.
Идея дифференциального метода коррекции координат заключается в том, что приёмная аппаратура спутниковых систем устанавливается, на так называемых, опорных (контрольных) станциях, координаты которых определены геодезическим способом и точность привязки в данной системе координат значительно превышает точность определения места по навигационной системе.
Таким образом, принимая измерительную информацию, на станции появляется возможность вычислять дифференциальные поправки к координатам, или радионавигационным (навигационным) параметрам. Эти поправки практически постоянны на некотором удалении от опорной станции, т. е. в некотором дифференциальном районе. Поправки радиотехническими методами передаются в приёмную судовую аппаратуру для получения более точных координат, поэтому в судовых ПИ имеется специальный дифференциальный блок. В системе DGPS принято рассчитывать поправки к псевдодальностям, так как неизвестно, какое созвездие спутников применяет пользователь системы для определения места судна.
Поправки можно использовать в двух режимах:
1. Для неподвижных объектов является несущественным использование дифференциальных поправок в реальном масштабе времени и они могут запоминаться и применяться в дальнейшем для обработки навигационной информации.
2. Для движущихся объектов, которыми являются суда, необходимо применение поправок в реальном масштабе времени.
Состав дифференциальной подсистемы представлен на рис. 25.22.
Каналы связи могут быть наземные, например, в частотном диапазоне радиомаяков, или через геостационарные спутники (ИНМАРСАТ).
Наибольшее распространение имеет сеть опорных станций, расположенных на уже действующих радиомаяках (рабочие каналы морских радиомаяков находятся в диапазоне 283,5-325кГц).
Радиомаяки получают вторую жизнь, работая в режиме дифференциальной GPS или ГЛОНАСС. Частотный канал для передачи поправок обычно сдвинут на величину около 0,5 кГц относительно основной частоты. На размеры зоны оказывают влияние те же факторы, что и на дальность действия обычного радиомаяка маяка в режиме пеленгования (в среднем 100 миль). Это очень важно для потребителей, так как дифференциальная зона «дышит» в зависимости от условий распространения радиоволн, и на её границах приём может оказаться неустойчивым. С удалением от опорной станции точность определения места падает, т. е. в соответствии с рисунком 25.22 М1 М2 М3,
где М1, М2, М3 средние квадратические погрешности определения координат в соответствующих зонах.
Геостационарный
спутник
Спутник GPS
Поправки
Поправки
Поправки
Опорная станция
ПИ GPS
компьютер
модем
передатчик
ПИ
DGPS
компьютер
модем
Рис. 25. 22. Состав дифференциальной
системы спутниковой РНС
Морские дифференциальные подсистемы СНС, работающие непрерывно, обеспечивают передачу потребителям дифференциальных сообщений в формате, соответствующем стандарту RTCM-104 (Radio Technical Comission for Marine Services). При этом обеспечивается возможность получения надежных навигационных определений в реальном масштабе времени с интервалами не более 5-10 с. В Стандарте RTCM-104 задаётся число различных посылок данных в двоичном формате. Первый набор сообщений (от 1 до 17) предназначен для навигационных приемников, отслеживающих код C/A, и дает точность примерно 10 метров. Они вносят коррекции на ионосферу и другие ошибки, но имеют свойственную коду C/A ошибку дискретизации. Сообщения 18 21 относятся к фазовой коррекции несущей GPS и используются для наблюдений.
В сигналах опорных станций транслируются 16 видов данных, но непосредственно для навигации используются сообщения типа 1 с общей информацией, которая включает в себя:
Идентификатор опорной станции.
Расписание передачи информации.
Объём передачи информации.
Техническое состояние опорной станции.
Затем передаются поправки к псевдодальностям по каждому спутнику отдельно в фазовых циклах по следующей форме:
![]() ,
,
где dФ(t0) – поправка к псевдодальности в момент t0,
![]()
приращение поправки за
время
(t-t0).
приращение поправки за
время
(t-t0).
Далее следуют:
идентификатор спутника;
техническое состояние спутника;
возраст информации;
предполагаемая погрешность навигационного параметра.
Если произошла коррекция орбитальных данных спутника или произведена временная синхронизация системы, то в течение некоторого времени допол-нительно передаётся поправка за изменение данных dФ (сообщения типа 2):
![]() .
.
В США, Канаде, Украине, России и многих других странах дифференциальные передачи радиомаяков бесплатны. В Великобритании и некоторых других странах услугами морской службы DGPS можно воспользоваться только по подписке.
Существуют также коммерческие передачи DGPS, осуществляемые другими средствами (через VHF или UHF радиостанции или спутник связи, или на поднесущей FM радиостанции), воспользоваться которыми можно, только уплатив подписной взнос. Некоторые из них обеспечивают точность 1 метр или лучше при наличии специального приемника GPS.
Важным достоинством реализации дифференциального режима является возможность обеспечения контроля целостности рабочего созвездия спутников, используемого для навигационных определений, и оперативной передачи потребителям информации о целостности.
Область применения дифференциального режима для судов транспортного, рыбопромыслового, речного флотов достаточно широка.
Применение СНС в стандартном режиме работы, т.е. при работе по сигналам стандартной точности в штатном режиме, практически удовлетворяет требованиям к навигационному обеспечению судов в части точности, доступности и рабочей зоны при плавании в открытом море. При использовании их в дифференциальном режиме в рабочей зоне дифференциальной системы удовлетворяются все основные требования к навигационному обеспечению судов на всех этапах плавания.
При использовании дифференциального режима работы СНС решаются следующие специальные навигационные задачи:
- обеспечение высокоточного судовождения на внутренних водных путях (реках, озерах и водохранилищах);
- рыбный промысел в прибрежных водах, узкостях и в районах со сложной навигационной обстановкой;
- высокоточный промер глубин в прибрежных водах и узкостях;
- точное выставление и контроль за местоположением плавучих средств навигационного ограждения, как на море, так и на реках и в узкостях;
- прокладка кабелей и трубопроводов, как в прибрежных водах, так и в открытом море;
- геодезические и другие научные исследования в любых районах мира;
- обеспечение добычи полезных ископаемых и проведения необходимых изыскательских работ.
Ряд стран Балтийского моря (Польша, Финляндия, Швеция, Дания и Эстония) установили сеть опорных станций, зона действия которых охватывает большую часть Балтийского моря.
Согласно принятой в США программе развития дифференциальной подсистемы, предусматривается развёртывание 52 опорных станций, зона действия которых охватывает все прибрежные воды США. 23 таких станции планируется разместить в Канаде, что позволит обеспечить высокоточными навигационными измерениями внутренние водные пути Великих озер, реки Святого Лаврентия.
Совместное использование СНС ГЛОНАСС и GPS получило название GNSS = GPS + ГЛОНАСС. Такое совместное использование позволяет повысить точность и надёжность определений за счёт увеличения числа наблюдаемых спутников. В Англии разработан и успешно прошёл испытания 20-канальный приёмоиндикатор САА-ISN для GNSS в дифференциальном режиме (DGNSS), который работает через опорные станции Ski Fix с каналом связи для передачи поправок через геостационарные спутники системы ИНМАРСАТ. Для расчёта координат применяется референц-эллипсоид WGS-84. В Украине разработан и успешно эксплуатируется приёмоиндикатор аналогичного типа СН-3101 (см подраздел 25.5.1)
25.4.6. Европейская навигационная глобальная служба – EGNOS
Большой интерес представляет создание и ввод в эксплуатацию европейской ГНСС «Галилео» как компонента Всемирной радионавигационной системы (ВРНС), требования к которой изложены в резолюции IMO.
ГНСС создаётся в 2 этапа:
- GNSS-1, первое поколение системы, которая которой будет основываться на использовании сигналов СНС НАВСТАР и ГЛОНАСС и дополнением этих созвездий спутниками таких подсистем, как EGNOS в Европе, а так же подобными подсистемами WAAS (США) и MSAS (Япония).
- GNSS-2, второе поколение системы, которая будет обслуживать гражданских потребителей и находиться целиком под контролем гражданских служб.
GNSS-1 состоит из:
- среднеорбитальной СНС GPS (США);
- среднеорбитальной СНС ГЛОНАСС (Россия);
- 4-х взаимодействующих геостационарных спутников: трёх ИНМАРСАТ-3 и одного Artemis.
Разработанный для безопасности морского, воздушного и наземного транспорта проект EGNOS обеспечит потребителям доступ до различных видов обслуживания, таких как:
- обеспечения дополнительной информации о местоположении подобно штатным режимам действующих СНС;
- информации о целостности – в случае аномальной передачи данных от спутников СНС НАВСТАР и ГЛОНАСС в зоне их действия, EGNOS будет посылать сигналы уведомления, которые будут приниматься каждые 6 секунд, до тех пор, пока эти спутники могут передавать ошибочную информацию до устранения неполадок либо нейтрализации или реконфигурации данных.
- служба дифференциального управления – EGNOS улучшит точность измерений, которая обеспечивается системами GPS и ГЛОНАСС за счёт уменьшения ионосферных ошибок и управления эфемеридами спутников и тем самым исключить влияние преднамеренного загрубления точности GPS;
- доступности и непрерывного обслуживания спутники EGNOS на геостационарных орбитах обеспечат перекрытие всего часового пояса Европы и улучшения геометрического фактора системы;
- обслуживания по высокоточному временному обеспечению.
В наземные средства EGNOS будет входить до 30 станций мониторинга (RIMS) и 4 контрольных центра (МСС), размещённых в Испании, Великобритании, Германии и Италии.
25.5. АППАРАТУРА ПОТРЕБИТЕЛЕЙ СПУТНИКОВЫХ НАВИГАЦИОН-
НЫХ СИСТЕМ
Точное определение местоположения судов без применения системы глобального позиционирования крайне затруднено, а во многих случаях практически невозможно. Это делает её незаменимой в индустрии морских транспортных перевозок.
Аппаратура потребителей в этих случаях может быть представлена в виде:
Навигационных комплексов для судоходства, включающих в себя в основном оборудование лидера в области GPS-приборов американской компании Trimble (серия приборов DSM 12/212, 4000 Rsi/Dsi и др.) и обеспечивающих получение информации о координатах местоположения объекта и отображение на морских электронных картах в формате S57/DX90.
Гидрографических промерных комплексов, состоящих из цифрового эхолота, GPS-прибора, программного геоинформационного обеспечения, функциони-рующего на персональном компьютере, который объединяет работу всех составных частей. С помощью комплексов выполняются работы по съёмке рельефа дна у причалов, в каналах и на других участках акватории портов с целью принятия решений при инженерных изысканиях, проектировании, строительстве, проведении дноуглубительных и других работ.
Систем лоцманской проводки судов в портах, включающих базовую станцию обработки DGPS-поправок, передающую УКВ-радиоаппаратуру для передачи поправок, портативные комплекты для лоцмана. Системы обеспечивают точность позиционирования до 1 м и позволяют выполнять лоцманскую проводку, швартовку судов в порту в любых погодных условиях.
Систем диспетчерского управления и контроля транспортных средств (Automatic Vehicle Location), предназначенных для обеспечения оперативного контроля и управления транспортными средствами предприятия, для обеспечения безопасности при перевозке особо опасных грузов, ценностей, пассажиров и т. д. Системы функционируют следующим образом: на транспортные средства устанавливается бортовой комплект, включающий GPS-прибор, контроллер, средство передачи информации, с помощью которого осуществляется определение текущих координат, скорости, курса, сбор информации о состоянии датчиков. Всё это обрабатывается и передаётся в диспетчерский центр, где осуществляется визуальный контроль за местонахождением и состоянием подчинённых транспортных средств по электронной карте местности.
В странах СНГ для работы с низкоорбитальными СНС «Цикада-М», «Цикада», а так же американской системой «Транзит» (см. подраздел 25.3 настоящей главы) используется следующая аппаратура для морских потребителей: СЧ-1, СЧ-2, СЧ-3 («Чёлн»), «Бирюса-СН», «Бирюса-СН2», АДК-3, «Шхуна». Однако с введением в эксплуатацию систем ГЛОНАСС и GPS данная аппаратура не стала удовлетворять требованиям потребителей и в настоящее время её производство практически приостановлено.
Для работы с системой ГЛОНАСС в разное время разрабатывалась и поставлялась аппаратура для морских потребителей: «Шкипер», «Бриз», «Чёлн-4», «Навигатор».
Для использования современных спутниковых ПИ одним из главных требований к ним выдвигается то, что они должны принимать сигналы как от системы ГЛОНАСС, так и от GPS. Серийную аппаратуру такого класса (серия СН) производит ГП «Оризон-Навигация» (Украина, г. Смела).
Из зарубежных образцов, как пример, можно назвать ПИ типа «Trimble» (США), «Furuno», «JMC» и «JRC» (Япония).
Все модели GPS приёмников, начиная с самых дешевых, как правило, имеют следующий набор базовых возможностей:
определение прямоугольных (x, y), геодезических координат (широта, долгота) и высоты над уровнем моря.
определение сторон света, дирекционного угла на точку и работа в режиме «компаса»
поддержку нескольких систем координат (datum) и возможности задания пользовательской, что является необходимым условием использования приёмников с электронными картами различных производителей;
определение текущей, средней, максимальной скорости;
занесение в память приёмника координат выбранных точек (way points);
определение направление движения;
определение расстояния до выбранной точки и ориентировочное время пути, исходя из текущей (или средней за период) скорости;
запись в память устройства пройденного маршрута с возможностью обратной его прокрутки;
индикация точного местного времени, времени заката и рассвета;
определение пройденного пути;
интерфейс к PC для загрузки выбранных путевых точек маршрутов. Возможен мониторинг местоположения прямо на экране компьютера, но для этого может понадобиться или карманный компьютер, или ноутбук.
25.5.1. Приёмоиндикатор СН-3101
Навигационная аппаратура потребителей спутниковых навигационных систем ГЛОНАСС и NAVSTAR СН-3101 производится на Украине (г. Смела) и предназначена для непрерывной, автоматической выработки текущих значений координат места, времени и путевой скорости кораблей и судов по радиосигналам стандартной точности СНС ГЛОНАСС и GPS NAVSTAR в любой точке земного шара, в любой момент времени, независимо от метеоусловий, а также выдачи их на устройство индикации и, по стандартному интерфейсу, внешним потребителям с дискретностью не менее 1 с.
Приёмоиндикатор СН-3101 обеспечивает решение следующих задач:
- Автоматический выбор оптимального, с точки зрения ожидаемой точности, созвездия ИСЗ ГЛОНАСС и GPS. При работе в совмещенном режиме, автоматический поиск, захват навигационных сигналов спутников и в режиме слежения за ними измерение навигационных параметров, приём навигационных сообщений, используемых для однозначных навигационных определений без ввода начальных данных;
- автоматическую непрерывную выработку координат, времени и вектора путевой скорости движения потребителя по сигналам СНС ГЛОНАСС, GPS NAVSTAR, при совместной обработке сигналов СНС ГЛОНАСС и GPS NAVSTAR;
- выдачу на индикацию с дискретностью 1 с текущих координат в системе координат ПУЛКОВО 1942 года, на общеземном эллипсоиде 1990 года (ПЗ-90), в системе координат WGS-84 или в местной системе координат;
- оценку прогнозируемой точности определения координат;
- приём, хранение и обновление альманахов СНС ГЛОНАСС и GPS NAVSTAR;
- автоматический выбор ИСЗ СНС ГЛОНАСС и GPS NAVSTAR с учётом их технического состояния;
- автоматический контроль функционирования аппаратуры, тестовый контроль функционирования аппаратуры, индикацию неисправностей;
- отображение на экране приёмоиндикатора признаков режимов работы аппаратуры, вводимых и выводимых параметров;
- запоминание текущих координат в качестве координат маршрутной точки. Ввод и хранение до 500 маршрутных точек, до 50 маршрутов движения;
- определение пеленга и расстояния от текущей точки до любой из маршрутных точек или между двумя любыми выбранными точками;
- движение по маршруту с выработкой параметров отклонения от маршрута;
- сопряжение с внешними приборами и системами по интерфейсу RS-232;
- решение навигационной задачи при работе в дифференциальном режиме. Приём, учёт и коррекция информации в соответствии с рекомендацией RTCM SC-104.
Внешний вид приёмоиндикатора СН-3101 показан на рис 25.23.

Рис. 25. 23. Внешний вид приёмоиндикатора
СН-3101
Основные технические характеристики приёмоиндикатора СН-3101
Навигационная аппаратура потребителей спутниковых навигационных систем ГЛОНАСС и NAVSTAR СН-3101 обеспечивает работу по сигналам СНС ГЛОНАСС или GPS NAVSTAR, или по сигналам этих двух систем одновременно. В аппаратуре применяется 14-ти канальный цифровой приемник, позволяющий одновременно принимать 14 спутниковых навигационных сигналов данных систем. Для определения текущих значений навигационных параметров используются все «видимые» спутники. При уменьшении количества «видимых» спутников до 3-х, аппаратура переходит из режима трехмерных определений координат (3D) в режим двумерных определений координат (2D) в горизонтальной плоскости.
Принимаемые сигналы: ГЛОНАСС: L1-диапазон (СТ-код),
GPS: L1-диапазон (С/А-код).
Точность определения навигационных параметров (СКП):
автономные определения: GNSS - 10-12 метров,
ГЛОНАСС 10-15 метров,
GPS 25-40 метров;
дифференциальный режим: 1-3 метра.
Точность определения скорости 0,2 узла (0,1 м/сек).
Время начального определения:
при «холодном старте» не более 180с.
при «горячем старте» не более 90с.
Для облегчения оценки точности текущих значений навигационных параметров аппаратура вырабатывает оценку СКП, при расчёте которой используются практически все факторы, влияющие на точность.
Частота обновления координат 1 раз в секунду.
Время возобновления выработки навигационных параметров после кратковременного (до 20 с) пропадания радиовидимости навигационных спутников, не более 4 6 с.
Активная антенна, всенаправленная в верхней полусфере.
Длина антенного кабеля 50 метров.
Питание: переменный ток 110/127/220 В, 50 Гц, постоянный ток 9-30 В.
Потребляемая мощность не более 7,5 Вт.
Аппаратура СН-3101, благодаря технологиям, заложенным в неё, надёжно работает при любых погодных условиях, устойчиво принимает данные от спутников и выдает стабильные показания даже при сильной продольной и поперечной качке в штормовых условиях.
Конструкция приёмника имеет поворотную подставку с отверстиями для крепления, что даёт возможность установки прибора в любом удобном для пользователя месте. Выбор режимов работы и набора выходных параметров осуществляется при помощи подсвечиваемых клавиатуры и дисплея.
Состав аппаратуры: приёмоиндикатор, блок антенный, сетевой адаптер, комплект кабелей.
Органы управления.
Реализация функций приёмоиндикатора осуществляется с помощью органов управления, расположенных на передней панели ПИ:
- вывод на дисплей ПИ соответствующих формуляров (клавиши NAV, WPT, TRK, SND, AUX, INF, ST, F).
- управление маркером (клавиши « < », « > », « /\ », « \/ »);
- изменение значения параметра (клавиши « 0....9 »);
- перевод аппаратуры из режима выбора параметра в режим редактирова-ния значения параметра и наоборот. Ввод значения параметра в память ПИ (клавиша " ENTER);
- выбор режима подсветки клавиш и дисплея ПИ (клавиша «»). Последовательным нажатием этой клавиши оператор может задать один из трёх режимов подсветки:
Подсветка дисплея включается примерно на 15 секунд после любых действий с органами управления ПИ.
Параметры, входящие в состав формуляра, разделяются на индицируемые и вводимые. Индицируемые параметры не могут быть изменены оператором. Вводимые параметры допускают как просмотр, так и изменение своих значений.
Внутри формуляра возможны два режима работы системы ввода-вывода - режим выбора параметра и режим редактирования параметра.
В режиме выбора параметра можно перемещать маркер между параметрами. При этом вид маркера зависит от типа параметра.
Работа аппаратуры.
После включения аппаратура автоматически производит поиск и принятие решения о приёме (захвате) навигационных сигналов ИСЗ. В режиме слежения за сигналами она производит измерение навигационных параметров и приём навигационных сообщений, полученные данные используются для навигационных определений. При этом производятся выработка и выдача координат места, времени и вектора путевой скорости потребителя.
Аппаратура может работать по СНС ГЛОНАСС (режим «GLON»), по GPS NAVSTAR (режим «GPS») или по двум системам одновременно (режим «GNSS»).
Излучаемые с борта ИСЗ сигналы на частотах около 1,6 ГГц принимаются ПИ, предварительно фильтруются, усиливаются по ВЧ и поступают на плату синтезатора ПВ, входящего в состав ПИ. На плате синтезатора происходит основное усиление и преобразование их в цифровой код отдельно для каждой системы. Затем сигнал в цифровом коде используется для измерения навигационных параметров и выделения навигационного сообщения. Полученные данные поступают на навигационный процессор ПВ, где производится программная обработка навигационного сигнала, решается навигационная задача и выдача результатов решения на дисплей и внешним потребителям.
Текущие координаты определяют положение антенны в текущий момент времени. К текущим координатам можно отнести и высоту антенны. Высота антенны, в зависимости от установки потребителем параметра «Geoid Alt» в формуляре AUX, измеряется над уровнем геоида, или над уровнем эллипсоида.
Аппаратура позволяет вырабатывать координаты в 4-х системах: (WGS-84, ПЗ-90, SK - 42, в локальной (местной) системе координат).
Оценка прогнозируемой точности координат представляет собой величину прогнозируемой средней квадратической погрешности (СКП) выраженной в метрах.
Аппаратура работает по всемирному координированному времени с учетом поправки на местное время, вводимой оператором. Время обновления данных - не менее 1 с. Местное время вырабатывается встроенным таймером и корректируется по сигналам ИСЗ.
При наличии дифференциальных поправок для четырех и более ИСЗ, участвующих в определении координат, индицируется признак работы в дифференциальном режиме (символ D).
Поправка на часовой пояс (разность между временем в текущем часовом поясе и временем по Гринвичу) задается оператором и может вводиться с точностью до минут.
Кроме выполнения основной навигационной задачи в аппаратуре предусмотрено выполнение дополнительных сервисных задач:
- прогноз ИСЗ (в формуляре SНD);
- обмен навигационной информацией с внешними потребителями (в форму-лярах AUX и F);
- статистическая обработка координат места судна (в формуляре ST);
- выработка аппаратурой рекомендаций при движении по маршрутным точкам (в формулярах WPT, TRK).
Решение дополнительных сервисных задач, а также приём и учёт дифференциальных поправок (при работе в дифференциальном режиме) и обмен информацией с внешними потребителями производятся параллельно с решением основой навигационной задачи.
Включение аппаратуры.
1 Тумблеры "СЕТЬ" и "РЕЗЕРВ" на сетевом адаптере - в положении "ВКЛ". На ПИ нажать клавишу "ON". Аппаратура должна включиться и, примерно через минуту, на дисплей ПИ будет выведен навигационный формуляр NAV.
Допустимое значение СКП задается в формуляре AUX1. При включении аппаратуры допустимое значение СКП автоматически устанавливается равным 200 м.
Далее аппаратура начнет поиск ИСЗ, находящихся в зоне радиовидимости, захват, синхронизацию и через 2-3 минуты на экране дисплея ПИ высветится полная навигационная информация, которая в дальнейшем будет обновляться с дискретностью в 1 секунду.
Определение основных навигационных параметров.
Вывести на дисплей ПИ формуляр NAV1 (нажать клавишу «NAV»), при этом, на дисплей ПИ будут выведены текущие координаты положения антенны ПИ - широта, долгота и высота.
Информация о времени находится в формуляре NAV2. Для вывода информации о времени - повторно нажать клавишу "NAV".
При помощи редактируемых параметров формуляра "NAV" оператор может:
- задать режим работы аппаратуры по системам "GPS", "GLON" или "GNSS";
- выбрать систему координат;
- ввести поправку местного времени.
Ниже приводится отображение навигационной информации в формулярах NAV1 и NAV2
Информационный формуляр NAV1.
В зависимости от режима индикации координат формуляр имеет вид с возможными вариантами отображения координат:
- широта и долгота в градусах, - широта и долгота в градусах,
минутах, долях минут: минутах, секундах, долях секунд:
<00°00’00.0N
GNSS D
180°00’00.0E
WGS-84 COG
000°
SOG 000.0 rms
**** 00:00:00 H
+000
<00°00.000N
GNSS D 180°00.000E
WGS-84 COG
000° SOG 000.0 rms
**** 00:00:00 H
+000
- номер зоны и координаты X, Y в картографической проекции ГАУССА:
<
+0000068.3 GNSS D 30
833950.0 SK-42
СOG
000°
SOG 000.0 rms
**** 00:00:00
H +000
Первая строка:
- широта (N-северная, S-южная) или координата X в картографической проекции ГАУССА;
- режим работы аппаратуры «GLON», «GPS» или «GNSS» (параметр вводимый);
- признак работы в дифференциальном режиме D.
Если количество ИСЗ, на которые есть поправки, более трех - индицируется признак дифференциального режима работы аппаратуры (D). В других случаях - пробел.
Вторая строка:
- долгота (E-восточная, W - западная) или номер зоны и координата У в картографической проекции ГАУССА;
- система координат WGS-84, PZ-90, SK-42, Local (параметр вводимый).
Третья строка:
- путевой угол, град;
- скорость, уз.
Четвертая строка:
- прогнозируемая СКП координат, метры («rms ****» –значение СКП более 200 метров);
- текущее время часы, минуты, секунды.
Пятая строка - высота антенны над уровнем геоида или эллипсоида, метры.
Информационный формуляр NAV2.
^T>+00:00 Time
00:00:00 Data
06/01/80 Tw
00:00:00 00000.0
Первая строка - поправка местного времени часы, минуты, со знаком «+» восточнее и со знаком «» западнее Гринвичского меридиана (параметр вводимый).
Вторая строка - местное время, часы, минуты, секунды.
Третья строка - местная дата, число, месяц, год.
Четвертая строка:
- время работы прибора от момента включения, часы, минуты, секунды;
- наработка прибора с момента первого включения, часы.
25.5.2. Приёмоиндикаторы NT-серии («Trimble», США)
В качестве модификаций приёмоиндикаторов NT-серии («Trimble», США) могут применяться приёмоиндикаторы NT-100, NT-200, NT-200D, NT-200G, имеющие незначительные различия между собой. Работу указанных типов ПИ рассмотрим на примере приёмника NT-GPS, установленного на тренажёре NAVI-SAILOR Киевской государственной академии водного транспорта.
Передняя панель операторский интерфейс системы NT GPS. Она снабжена дисплеем для передачи информации от пользователя к GPS.
Расположение органов управления изображено на рис. 25.24.
Дисплей – LCD экран 320 240 пикселей, который просматривается при любом освещении.
Кнопка POWER - для включения/выключения питания NT GPS, а также для ввода режима инсталляции, который требуется для ввода настроечных данных (при нажатии её держится нажатой кнопка SETUR).
Кнопка BRT – регулировка яркости дисплея.
Кнопка CON – регулировка контрастности.
Кнопки от 0 до 9 – используются для ввода цифровых данных на различных экранах. Кнопка » используется для перемещения курсора между полями и для завершения операций на полях цифровых данных.
Кнопки управлением курсора – кнопки-стрелки – управляют движением курсора на тех же экранах, где воспроизводится курсор.
На экранах SETUP, WAYPT и ROUTE кнопки-стрелки вверх/вниз используются для перемещения курсора между пунктами меню, которые могут быть изменены пользователем, а кнопки-стрелки влево/вправо используются для редактирования или изменения данного пункта.
Кнопки SETUP, STATUS, NAV, SAVE, WAYPT и USER используются для доступа к различным функциям NT GPS и рабочими режимами.

Рис. 25.24. Панель управления приёмоиндикатора
NT GPS
(«Trimble», США)
SETUP – открывает доступ к различным экранам, которые позволяют настраивать работу NT GPS.
STATUS – выводит дополнительную информацию по рабочему состоянию GPS, такую как сила сигнала и принимаемые операционные сообщения, а также настройки, выбранные на различных экранах SETUP.
NAV – сначала выводит NAV1, при втором нажатии выводится NAV2. Эти экраны обеспечивают два разных способа для наблюдения за навигационными данными.
SAVE – нажатие этой кнопки выводит текущую позицию и время, предоставляет пользователю выбор, с помощью программированной клавиши – soft key, либо ввода этой позиции как аварийной цели, например, функция «Человек за бортом».
WAYPT – по этой кнопке открывается доступ к библиотекам путевых точек и маршрутов. С помощью этой функциональной кнопки можно просмотреть, добавить или отредактировать путевые точки и маршруты.
Пять клавиш (программированные клавиши soft key), расположенных справа от дисплея, и отмеченных горизонтальными линиями, предназначены для вызова выборов меню. Функции, которые они выполняют при простом нажатии, могут изменяться при переходе с одного экрана на другой. Функция, связанная с отдельной клавишей, указывается отметкой, которая появляется возле клавиши в правой части экрана.
MENU – если выборы меню накрывают или затемняют часть экрана, их можно убрать нажатием кнопки MENU. Вызов их на экран осуществляется повторным её нажатием. Если отметки клавиш скрыты, то при нажатии кнопки MENU они появятся.
PLOT – вывод на дисплей электронной карты (кроме NT-100), либо сетки в проекции Меркатора.
Текущий режим работы указывается в правой части заголовка экрана. Индикаторами режимов являются: DGPS, GPS, DR и EXT.
После включения приёмник NT GPS начинает автоматически определять место судна. Время первой фиксации координат места лежит в промежутке от 30 секунд до 2-3 минут и зависит о состояния альманаха системы и данных эфемерид в памяти приёмника. В течение этого процесса заголовок экрана может показывать режим DR или EXT, если обновление координат с NT происходит от внешнего источника.
С переходом в режим непрерывного обновления места по системе GPS индикатор состояния покажет режим DGPS или GPS – зависимости от конфигурации системы и наличия дифпоправок (RTCM-104). При срыве сопровождения спутников приёмник автоматически перейдёт в один из режимов: DR или EXT.
NT GPS начинает сканирование для спутников, захват по доступным спутникам, получение навигационных данных и непосредственно расчёт позиции судна. Навигационную информацию можно вывести в цифровом виде. Существуют два навигационных экрана, NAV1 и NAV2, которые выдают курс судна при плавании по маршруту или направление на путевую точку маршрута. NAV2 отображает картушку компаса, указывающую курс на следующую путевую точку и курс относительно дна. Кроме того, в нижней части дисплея NAV2 выводится индикатор поперечного сдвига от маршрута.
Три последовательно включаемые навигационные экраны USER1, USER2, USER3 позволяют настроить их для вывода необходимой информации в виде двух или четырёх текстовых строк.
До включения NT GPS в работу необходимо с помощью кнопки SETUP сделать необходимые установки. Все исходные установки вводятся с помощью цифровой клавиатуры и/или стрелочных кнопок и сохраняются в памяти прибора.
Установочное меню NT GPS – это 4-х уровневая структура.
Первый уровень SETUR вызывается нажатием кнопки SETUP (рис. 25.25).
Вторые уровни – GPS, MISC, DR, ALARM, USER – вызываются програм-мируемыми клавишами на экране первого уровня (рис. 25.26, 25.27).
Третий уровень – DATUM, USER1, USER2, USER3 и т.д. – вызывается программируемыми клавишами на экранах второго уровня (рис. 25.28).
Четвёртый уровень вызывается программируемой клавишей на экране третьего уровня (рис. 25.24).
Экран каждого меню представляет собой набор данных, из которых можно произвести выбор или ввести его. Выборы из определённого меню представляют собой фиксированные наборы текущих или исходных данных, подсвеченных окошком. Другие входы в меню, такие как дата и время, требуют ввода числа или значения с помощью цифровой аппаратуры и/или стрелочных кнопок. Окончание выбора, ввода и перемещения на следующее поле фиксируется нажатием кнопки с двойной стрелкой ».

Каждый установочный экран включает перечень из 17 элементов навигации, которые могут быть выбраны или установлены на каждом экране пользователя USER. Обозначение указанных элементов стандартное (табл. 25.4).
Каждому экрану USER установлено фиксированное количество линий или строк (2 или 4). Выбор нужного элемента производится его выделением.
Табл. 25.4
Date (Дата)
|
День, месяц, год |
Time (Время)
|
Время (часы, минуты, секунды) |
Position (Координаты места)
|
Широта и долгота (в проекции Меркатора) |
COG (Курс абсолютный)
|
Курс относительно Земли |
Продолжение табл. 25.4
SOG (Скорость абсолютная)
|
Скорость относительно Земли |
XTE (Величина бокового уклонения)
|
Величина бокового уклонения |
DTW (Дистанция до путевой точки)
|
Расстояние до путевой точки |
DTD (Дистанция до пункта назначения)
|
Расстояние до конечной точки маршрута |
CTW (Курс на путевую точку)
|
Курс, пеленг на путевую точку |
TTG (Время движения)
|
Оставшееся время на переходе |
ETA (Время прибытия)
|
Расчётное время прихода в пункт назначения |
Set (Направление течения)
|
Направление течения |
Drift (Дрейф)
|
Скорость течения |
Speed (Скорость)
|
Скорость относительная (относительно воды) |
Heading (Компасный курс)
|
Курс заданный |
DMG
|
Кратчайшее расстояние до путевой точки |
VMG
|
Средняя скорость до путевой точки |
25.5.3. Приёмоиндикаторы GPS типа FURUNO, «JMC» и «JRC» (Япония), «Котлин» (Россия)
Н иже
приводятся описание наиболее
распространенных типов приёмо-индикаторов
GPS. Высокая
надежность, удобство в эксплуатации,
высокие тактико-технические характеристики,
современный дизайн приёмоиндикаторов
типов «Furuno», «JMC» давно снискали
заслуженное уважение у судоводителей
всего мира.
иже
приводятся описание наиболее
распространенных типов приёмо-индикаторов
GPS. Высокая
надежность, удобство в эксплуатации,
высокие тактико-технические характеристики,
современный дизайн приёмоиндикаторов
типов «Furuno», «JMC» давно снискали
заслуженное уважение у судоводителей
всего мира.
FURUNO GP-32 (FURUNO GP-37).
Компактный водонепроницаемый GPS-приёмник с поддержкой коррекции WAAS (см. подраздел 25.4.6), спроектированный для малых судов (рис. 25.29). Точность определения местоположения со-
с
Рис. 25.29.
Приёмоиндикатор FURUNO
GP-32
сколько видов звуковой и световой сигнализации, в том числе прибытие в район, пересечение треков, время, скорость и др.
Данный приёмоиндикатор характеризуется следующими особенностями:
- для показаний используется 4,5" LCD-дисплей;
-память: до 999 путевых точек, 50 маршрутов и 1000 точек для записи траектории;
- ввод путевых точек производится нажатием одной кнопки;
- несколько графических и цифровых режимов;
- функция Track Back для хранения и последующего воспроизведения маршрута по автоматически наносимым через определенные интервалы точкам;
- 12-канальный приемник GPS в компактном водонепроницаемом корпусе;
- встроенный WAAS-приемник, приём данных DSPS с внешнего приёмника;
- возможность подключения радара, эхолота, видеоплоттера, автопилота, АИС.
В комплект поставки входит: дисплей, антенна, антенный кабель 10 м. Сравнительные технические характеристики в сравнении с другими типами приёмоиндикаторов GPS приведены в табл. 25.5.
F URUNO
GP-90.
URUNO
GP-90.
Новый высокоэффективный 12-канальный GPS-приемник, подходящий для судов разных типов. Чувствительный приемник GPS обеспечивает точное определение местоположения (рис. 25.30).
Н
Рис. 25.30.
Приёмоиндикатор FURUNO
GP-90
ляется полностью водонепроницаемым, что позволяет устанавливать его на открытом мостике.
Данный приёмоиндикатор характеризуется следующими особенностями:
- соответствует требованиям IMO;
- 12-канальный приёмник GPS с LCD-экраном 6";
- встроенный WAAS-приемник;
- возможность работы в режиме DGPS;
- память: 2000 путевых точек и меток (включая 99 меток событий); 999 путевых точек / 30 маршрутов (до 30 путевых точек в каждом маршруте);
- Возможность подключения радара, эхолота, видеоплоттера, автопилота, АИС.
В комплект поставки входит: дисплей, антенна, антенный кабель 15 м.
С равнительные
технические характеристики в сравнении
с другими типами приёмоиндикаторов GPS
приведены в табл. 25.5.
равнительные
технические характеристики в сравнении
с другими типами приёмоиндикаторов GPS
приведены в табл. 25.5.
Приёмоиндикаторы JMC GP-100 и GP-200.
К
Рис 25.31. Приёмоиндикатор JMC-100
Данный приёмоиндикатор характеризуется следующими особенностями:
- встроенный 18-канальный GPS-приемник;
- поддержка WAAS/DGPS (модель GP-200) и DGPS (модель GP-100);
- точка "Человек за бортом";
- нанесение треков с емкостью памяти на 1000 фиксированных точек;
- аудиовизуальная сигнализация потери питания.
В комплект поставки входит: дисплей, антенна, антенный кабель. Сравнительные технические характеристики в сравнении с другими типами приёмоиндикаторов GPS приведены в табл. 25.5.
Приёмоиндикатор JMC NP-20NT GPS.
П римером
совместного использования электронных
карт и приёмника GPS является плоттер
панорамного обзора приёмоиндикатор
JMC NP-20NT GPS (рис. 25.32).
римером
совместного использования электронных
карт и приёмника GPS является плоттер
панорамного обзора приёмоиндикатор
JMC NP-20NT GPS (рис. 25.32).
Такой приёмоиндикатор характеризуется следу-ющими особенностями:
- 7" TFT-LCD дисплей панорамного обзора во влагозащищенном корпусе;
- быстродействующая система на основе 200 МГц ARM-процессора с поддержкой карт типа C-MAP;
- 12-канальный GPS-приёмник;
-
Рис. 25.32.
Приёмоиндикатор JMC
NP-20NP GPS
- поддержка системы координат UTM и системы Лоран-С;
- ориентация по курсу и по направлению;
- возврат в текущую позицию с помощью одной клавиши;
- отдельная клавиша MOB с сохранением текущей позиции при несчастном случае с автоматическим указанием пеленга, дистанции и расчетного времени прибытия в точку;
- инфракрасный пульт дистанционного управления.
В комплект поставки входит: дисплей, антенна, антенный кабель. Сравнительные технические характеристики в сравнении с другими типами приёмоиндикаторов GPS приведены в табл. 25.5.
 Приёмоиндикатор
JRC J-NAV 500 / 112
является одним из самых дешёвых
GPS-приёмников. Такой приёмоиндикатор
характеризуется следующими особенностями:
Приёмоиндикатор
JRC J-NAV 500 / 112
является одним из самых дешёвых
GPS-приёмников. Такой приёмоиндикатор
характеризуется следующими особенностями:
- монохромный экран с подсветкой;
- 12-канальный приемник GPS/DGPS;
- навигационные сигнализации: прибытие, якорь, граница, пересечение треков и потеря спут-ника;
-
Рис. 25.33.
Приёмоиндикатор JRC
J-NAV 500 / 112
- временной дифференциал Лоран-С;
- язык меню по выбору: английский, немецкий, норвежский, французский, испанский, японский, итальянский;
- импорт / экспорт путевых точек и треков.
В комплект поставки входит: дисплей, антенна, антенный кабель. Сравнительные технические характеристики в сравнении с другими типами приёмоиндикаторов GPS приведены в табл. 25.5.
С![]() удовой
спутниковый приёмоиндикатор
КОТЛИН МТ-102
(Россия)
создан на
базе спутниковых навигационных систем
ГЛОНАСС, GPS, WAAS, GNOS для навигационно-временного
обеспечения морских и речных судов
удовой
спутниковый приёмоиндикатор
КОТЛИН МТ-102
(Россия)
создан на
базе спутниковых навигационных систем
ГЛОНАСС, GPS, WAAS, GNOS для навигационно-временного
обеспечения морских и речных судов


Рис. 25.34. Судовой спутниковый приёмоиндикатор
КОТЛИН МТ-102 (Россия)
Спутниковый приёмоиндикатор КОТЛИН МТ-102 предназначен для определения текущих координат, скорости и времени по сигналам спутниковых навигационных систем ГЛОНАСС и GPS. Легко встраивается в навигационные комплексы и системы синхронизации различного назначения.
Функции приёмоиндикатора КОТЛИН МТ-102:
определение геодезических координат судна (выдача навигационной информации в системах WGS-84, ПЗ-90 или любых других опорных системах координат);
определение вектора путевой скорости (путевой угол и путевая скорость);
определение времени в шкалах UTC (SU), UTC(US);
ввод и хранение до 500 маршрутных точек;
ввод и хранение в памяти до 20 маршрутов или фарватеров (до 50 точек в каждом маршруте);
расчёт (по локсодромии и ортодромии) времени прихода судна в точку с заданными координатами и с заданной скоростью движения;
расчёт расстояния и направления между двумя маршрутными точками;
расчёт параметров отклонения от заданного маршрута.
срабатывание звуковой и визуальной сигнализации о подходе на заданное расстояние к маршрутной точке и о выходе за пределы выбранной ширины фарватера.
Сравнительные технические характеристики приведённых выше приёмо-индикаторов показаны в таблице 25.5.
Табл. 25.5
Техническая характеристика |
Furuno GP-32 (GP-37) |
Furuno GP-37 |
Furuno GP-90 |
JMC GP-100 (GP-200) |
СН-3101 |
Тип приёмника
Точность: GPS: DGPS: WAAS: GNSS
Время до первого определения
Скорость слежения
Геодезическая система
Дисплей
Объём памяти
Масса:
|
12 каналов, код С/А
10 м 5 м 3м
12 сек
900 узлов
WGS-84 и др.
LCD 4,5
До 1000 точек, 999 именова-ных точек, 50 марш.
0,54 (0,68) кг
|
12 каналов, код С/А
10 м 5 м 3м
12 сек
900 узлов
WGS-84 и др.
LCD 4,5
До 1000 точек, 999 именова-ных точек, 50 марш.
0,68 кг
|
12 каналов, код С/А
10 м 5 м 3м
12 сек
900 узлов
WGS-84, NAD-27 и др.
LCD 6
До 2000 точек, 999 именова-ных точек, 30 марш.
0,8 кг
|
18 каналов, код С/А
10 м 5 м 3м
12 сек
900 узлов
WGS-84 и др.
LCD 4,5
До 2000 точек, 300 именова-ных точек, 20 марш.
1,1 кг
|
14 каналов Код С/А, СТ
20-40 м 1-3 м 10-12 м
1,5 мин
99,9 узлов
WGS-84, ПЗ-90, SK-42
Жидко-кристаллический
До 500 маршрутных точек (50 марш.)
2,2 кг
|
25.6. КОСМИЧЕСКАЯ СИСТЕМА КОСПАС-САРСАТ
Международная космическая система КОСПАС-САРСАТ создана как глобальная система поиска и спасания в соответствии с межправительственным соглашением между СССР, США, Канадой и Францией. Советская часть проекта получила название КОСПАС (космическая система поиска аварийных судов и самолётов), другая часть проекта, созданная США совместно с другими странами, – САРСАТ (Search and Rescue Satellite Aided Tracking).
Другими словами КОСПАС-САРСАТ это глобальная спутниковая система оповещения о бедствии, предназначенная для определения местоположения терпящих бедствие объектов, их идентификации и вызова поисково-спасательных служб.
С сентября 1982 г. по конец 2002 г. при использовании системы КОСПАС-САРСАТ было спасено 15700 человек в 4500 поисково-спасательных операциях по всему миру.
Важность создания системы поиска аварийных объектов подчёркивается тем фактом, что аварийность на транспорте продолжает оставаться высокой: ежегодно в результате кораблекрушений, столкновений и пожаров гибнут тысячи людей. Спасание терпящих бедствие на морях и океанах, в воздушной среде и на континентах стало интернациональной, межгосударственной задачей. Система КОСПАС-САРСАТ приобрела огромную ценность для поисково-спасательных служб и самих терпящих бедствие людей.
Н ачало
использования системы КОСПАС-САРСАТ
относят к 9 сентября 1972 года, когда легкий
самолёт, на борту которого было двое
членов Конгресса США, потерпел аварию
в удалённом районе Аляски. Были предприняты
очень серьёзные меры по спасанию, но
никаких следов людей и обломков самолёта
тогда обнаружено не было. Реакцией на
эту трагедию стало принятие Конгрессом
Соединённых Штатов закона о том, что
вся авиация США должна обязательно
иметь на своём борту аварийные
радиопередающие устройства (маяки) АРМ.
Эти устройства разрабатывались, чтобы
автоматически активизироваться в случае
аварии для передачи сигнала бедствия.
ачало
использования системы КОСПАС-САРСАТ
относят к 9 сентября 1972 года, когда легкий
самолёт, на борту которого было двое
членов Конгресса США, потерпел аварию
в удалённом районе Аляски. Были предприняты
очень серьёзные меры по спасанию, но
никаких следов людей и обломков самолёта
тогда обнаружено не было. Реакцией на
эту трагедию стало принятие Конгрессом
Соединённых Штатов закона о том, что
вся авиация США должна обязательно
иметь на своём борту аварийные
радиопередающие устройства (маяки) АРМ.
Эти устройства разрабатывались, чтобы
автоматически активизироваться в случае
аварии для передачи сигнала бедствия.
В то время, когда спутниковая технология была все ещё в самом начале своего развития, частота, выбранная для передачи сигналов АРМ, была 121.5 МГц, которая так же была известна как Международная авиационная частота бедствия. Система работала, но имела много разных ограничений: частота была слишком загромождена, не было средств для определения источника сигнала, и что самое важное, другая авиация, проводящая поисково-спасательные мероприятия, должна быть в пределах зоны уверенного приема сигнала.
После нескольких лет использования, ограничения 121.5 МГц АРМ начали уже перевешивать их полезные качества. В это время как раз и подоспело решение о создании спутниковой поисково-спасательной системы. По замыслу создателей, она должна была работать на частоте 406 МГц, зарезервированной только для сигналов бедствия, в системе будет использоваться цифровой сигнал, обеспечивающий глобальный охват поверхности Земли и дающий однозначность определения источника аварийного сообщения. Данный принцип лёг в основу создания системы КОСПАС-САРСАТ.
Система САРСАТ была разработана при совместном участии США, Канады и Франции в 1977 году. Одновременно, параллельно системе САРСАТ в Советском Союзе разрабатывалась система КОСПАС.
В 1979 году, было принято решение объединить
эти системы в глобальную спутниковую
систему поиска и спасания, названную
КОСПАС-САРСАТ, и в 1984 году система была
объявлена полностью работающей.
1979 году, было принято решение объединить
эти системы в глобальную спутниковую
систему поиска и спасания, названную
КОСПАС-САРСАТ, и в 1984 году система была
объявлена полностью работающей.
Хотя спутники КОСПАС-САРСАТ перво-начально разрабатывались только для функцио-нирования на частоте 406 МГц, впоследствии было
принято решение о совместимости с тысячами 121.5 МГц маяков, уже находящимися в использовании. По этой причине, в приёмо-передающей аппаратуре спутника так же была заложена возможность приёма сигналов бедствия по каналу 121.5 МГц.
В Соединенных Штатах, система САРСАТ была разработана Национальным Аэрокосмическим Агентством (NASA). Как только система стала функциональной, управление было передано Национальной Администрации по исследованию атмосферы и океана США (NOAA), где она сейчас и находится. В настоящее время в компьютерной базе NOAA зарегистрировано свыше 314000 АРБ, работающих на частоте 406 МГц. В 1986 году в соответствии с требованиями Международной Морской организации (IMO) было принято решение об использовании частоты 406 МГц и для морских аварийных спутниковых радиобуев (АРБ). IMO также решило включить КОСПАС-САРСАТ в состав Глобальной морской системы связи при бедствии и для обеспечения безопасности (ГМССБ). Это означает, что все морские суда с этой даты обязаны иметь на своем борту АРБ-406.
Организация КОСПАС-САРСАТ продолжала расти. К четырем странам, основавшим систему, в последствии присоединилось 33 других страны (всего - 37), которые обслуживают 37 станций наземного слежения и 25 координационных центров во всем мире.
25.6.1. Состав и назначение системы КОСПАС-САРСАТ
Как уже было отмечено, Международная спутниковая система КОСПАС-САРСАТ предназначена для поиска аварийных объектов на поверхности Земли (см. рис. 25.35). Система используется как на суше (путешественниками, геологами, промысловиками), так и на море (на судах различных типов, буровых вышках, плавучих платформах).
Российская часть системы КОСПАС использует низкоорбитальные навигационные спутники типа «Надежда» с высотой орбиты 620 миль и орбитальным наклонением относительно экватора 83°. Период обращения спутника - 105 минут.
Американская часть системы САРСАТ использует низкоорбитальные спутники NOAA типа «Tiros-N» с высотой орбиты 528 миль и орбитальным наклонением 99°. Период обращения спутника 100 минут.
Также в последнее время в системе используются и геостационарные спутники, находящиеся на геостационарных орбитах (серии GOES и INSAT).
В систему входят три основных сегмента:
космический (низкоорбитальный и геостационарный);
наземный;
аппаратура потребителей (аварийные радиобуи (АРБ)).
Низкоорбитальный сегмент (низкоорбитальная система поиска и спасания НССПС LEOSAR) предназначен для приёма аварийных сигналов от АРБ, непосредственной ретрансляции их на наземный сегмент, находящиеся в зоне прямой их видимости. Низкоорбитальный космический сегмент состоит из нескольких низкоорбитальных ИСЗ, расположенных на взаимодополняющих орбитах. На борту ИСЗ помимо служебных систем, позволяющих определять положение ИСЗ в пространстве, устанавливается специальная аппаратура для приёма и обработки сигналов от АРБ и передачи информации на Землю. Эта аппаратура составляет бортовой радиокомплекс (БРК). Сигналы бедствия, излучаемые АРБ, принимаются БРК одного из ИСЗ, выведенных на низкую (600-1000 км) околоземную полярную орбиту. Если АРБ и низкоорбитальная станция приёма и обработки информации (НИОСПОИ) одновременно находятся в зоне видимости ИСЗ, то полученная от АРБ информация передаётся в координационные центры системы (КЦС) без задержки (локальный режим ретрансляции). В противном случае обработанная информация запоминается бортовой радиоаппаратурой ИСЗ, а затем передаётся ближайшему пункту НИОСПОИ при подлёте к нему (глобальный режим ретрансляции). Информация от всех НИОСПОИ собирается в центре системы (ЦС).
Другими словами функционирование низкоорбитального сегмента следует рассматривать в двух разных аспектах. Во-первых, низкоорбитальный сегмент КОСПАС-САРСАТ работает не одинаково при использовании АРБ-121 и АРБ-406. Во-вторых, имеются различия в работе аппаратуры при нахождении АРБ в зоне непосредственной видимости АРБ, НИОИСЗ, НИОСПОИ.
Возможные режимы: локальный режим непосредственной ретрансляции, при нахождении в зоне видимости спутника одновременно и береговой станции и АРБ, либо режим переноса информации с задержкой (глобальный режим), если спутник получил аварийный сигнал от АРБ, но низкоорбитальная станция приема и обработки информации (НИОСПОИ-LEOLUT) еще не появилась в его зоне видимости.
Аварийные буи, работающие на частоте 121,5 МГц, используются в основном на небольших самолетах. При работе с АРБ-121 возможен только локальный режим, так как информация об АРБ-121 не запоминается в аппаратуре БРК и не может быть доставлена на НИОСПОИ вне зоны взаимной видимости АРБ - НИОИСЗ - НИОСПОИ. Признаком аварийности служит сам номинал частоты (121.5 МГц) и характерная звуковая модуляция.

Рис. 25.35. Международная спутниковая
система КОСПАС-САРСАТ
При появлении в зоне видимости АРБ-121 любого низкоорбитального НИОИСЗ системы КОСПАС-САРОСАТ появляется возможность для непосредственной ретрансляции этого сигнала на НИОСПОИ приёмником БРК. Режим работы передатчика АРБ-121 - непрерывный, поэтому в течение сеанса связи, который в среднем составляет 10 мин, принятый сигнал обрабатывается приёмным устройством СПОИ с целью измерения доплеровского смещения частоты. Приёмное устройство обеспечивает обнаружение и измерение частоты сигналов не менее 10 одновременно работающих АРБ-121, если расстояние между ними не менее 50 км.
Измеренные в точно известные моменты времени значения частоты сигнала от АРБ поступают в ЭВМ, где хранятся данные о положении ИСЗ (эфемериды) на начало каждых 30 мин данных суток. Для определения координат АРБ используются не более 30 значений частоты от каждого АРБ в сопровождении 30 значений моментов времени. Истинные и зеркальные координаты с указанием вероятности того, насколько каждые из них близки к истинным значениям, поступают через линии связи в ЭВМ КЦС. Дополнительная обработка может быть произведена оператором НИОСПОИ по результатам отображения всех измеренных частот на графике частота - время. При анализе и обработке могут быть приняты во внимание: наличие помех, протяженность доплеровской кривой и т.п. Таким образом, основная обработка сигналов от АРБ-121, осуществляется на СПОИ и заканчивается спустя 20 мин после завершения сеанса.
Работа в локальном режиме осуществляется при ретрансляции сигнала АРБ-406 на НИОСПОИ с обработкой его на борту ИСЗ. После включения АРБ-406 начинает периодически излучать короткий сигнал, который содержит сведения, необходимые для обнаружения и синхронизации, а также продолжительный сигнал, несущий полезную информацию. Передача ведется в импульсном режиме с достаточной скважностью, что обеспечивает свободный доступ к БРК многим АРБ-406. Сигнал от АРБ-406 с выхода приёмной антенны БРК поступает на приёмник-процессор. Приёмник усиливает и фильтрует смесь сигнала с шумом, а процессор производит обработку сигнала с целью выделения аварийной информации и измерения доплеровского смещения частоты. Так как смысловая информация и результаты измерения представлены в цифровой форме, то они могут быть скомпонованы в единый цифровой поток, который совместно с сигналом от АРБ-121 (если он одновременно с АРБ-406 работает в зоне видимости ИСЗ) поступает на фазовый модулятор передатчика БРК.
После восстановления цифрового потока в наземной приёмной системе НИОСПОИ данные о доплеровской частоте и времени (примерно по 10 результатов измерений от каждого АРБ-406) попадают в ЭВМ СПОИ для определения истинных и зеркальных координат. Координаты АРБ-406 вместе с аварийным сообщением образуют группу аварийных данных, которые поступают в КЦС. В Координационном центре системы эти данные подвергаются вторичной обработке для устранения неоднозначности за счет использования априорной информации о контролируемых объектах. Здесь же происходит распределение потока данных по потребителям и приём аварийных данных из зарубежных центров.
В глобальном режиме сигналы АРБ-406 так же, как и в локальном режиме, обрабатываются в бортовом приёмнике - процессоре, однако попадают на НИОСПОИ только тогда, когда он окажется в зоне видимости ИСЗ, оставаясь в остальное время в памяти БРК (задержка передачи на СПОИ может составлять от 10 до 45 минут). Сегодня в основном, НИОСПОИ системы КОСПАС-САРСАТ находятся в северном полушарии. Режим переноса информации с задержкой реализуется путем циклической передачи всей имеющейся в памяти информации. Полный объем памяти передается за 3 минуты.
Принятые на НИОСПОИ сообщения (2048 сообщений от АРБ-406) поступают в оперативную память ЭВМ. Сразу же данные сортируются по принадлежности к одним и тем же АРБ-406 и определяются координаты всех АРБ, сигналы которых были приняты и обработаны бортовым приёмником - процессором (примерно 200 АРБ-406). Таким образом, на определение координат затрачивается около 10 мин, затем следует передача всего массива аварийных данных в КЦС.
Бортовой приёмник - процессор позволяет во время передачи на НИОСПОИ данных из памяти принимать и обрабатывать в глобальном режиме новые сообщения от АРБ-406. В этом случае в момент приёма посылки от АРБ-406 приостанавливается передача данных из памяти. Принятая посылка обрабатывается, передается на НИОСПОИ в режиме ретрансляции на борту и записывается в последнюю ячейку памяти БРК. Если при этом вся память была заполнена сообщениями от АРБ-406, то стирается самая первая (самая старая по времени) посылка. Затем продолжается передача данных из памяти.
Зона обслуживания системы в режиме непосредственной передачи определяется числом и географическим расположением СПОИ (каждый СПОИ обслуживает район радиусом примерно в 2500 км).
Система КОСПАС-САРСАТ рассчитывает местоположение аварийных радиобуев, используя метод Доплеровского определения координат. Чаще применяется термин «эффект Доплера» для описания явления, при котором частота сигнала, поступающего на приёмное устройство, меняется в зависимости от относительной скорости движения между передатчиком и приёмником. В результате Доплеровского эффекта принимаемая частота выше - при уменьшении расстояния между передатчиком и приёмником и ниже - при увеличении этого расстояния. Если относительное движение отсутствует, то принимаемая частота точно соответствует передаваемой частоте.
Географическое положение излучающих аварийных радиомаяков определяется системой автоматически с использованием данного метода с точностью не хуже 5 км для радиобуев, работающих в диапазоне 406 МГц, и 20 км для радиобуев, работающих на частоте 121,5 МГц.
П редставленная
ниже временная диаграмма частоты (рис.
25.36) показывает распределение частоты
принимаемого низкоорбитальным спутником
сигнала от неподвижного передатчика
на поверхности Земли. Точка изгиба
данной кривой - положение, при котором
спутник находится наиболее близко к
передатчику (МКС
- момент кульминации спутника). При
обработке реальной кривой может быть
получено расстояние от передатчика до
траектории спутника.
редставленная
ниже временная диаграмма частоты (рис.
25.36) показывает распределение частоты
принимаемого низкоорбитальным спутником
сигнала от неподвижного передатчика
на поверхности Земли. Точка изгиба
данной кривой - положение, при котором
спутник находится наиболее близко к
передатчику (МКС
- момент кульминации спутника). При
обработке реальной кривой может быть
получено расстояние от передатчика до
траектории спутника.
Используя данную информацию и зная нахождение спутника во времени при его проходе, можно построить две линии, которые представляют собой расстояние от траектории спутника до возможного нахождения передатчика.
Д
Рис. 25.36.
Временная диаграмма частоты алее,
зная время МКС спутника, очень просто
построить перпендикулярные линии из
точки траектории спутника в момент МКС
к линиям, которые представляют два
возможных местоположения передатчика,
одно - реальное, другое – зеркальное
(рис. 25.37). Последующий проход спутника
по другой спутниковой траектории может
быть использован
алее,
зная время МКС спутника, очень просто
построить перпендикулярные линии из
точки траектории спутника в момент МКС
к линиям, которые представляют два
возможных местоположения передатчика,
одно - реальное, другое – зеркальное
(рис. 25.37). Последующий проход спутника
по другой спутниковой траектории может
быть использован
для разрешения неоднозначности.
Неоднозначность также может быть разрешена путем учёта враще-ния Земли при расчёте доплеров-ских решений.
О
Рис. 25.37. Неоднозначность определения
местоположения передатчика
и может быть применим только для сигналов на частоте 406 МГц.
Таким образом, можно сделать следующий вывод:
доплеровское определение местоположения дает два решения для каждого радиомаяка: истинное и зеркальное относительно наземной проекции трассы спутника;
эта неоднозначность решается путем расчётов, принимая во внимание эффект вращения Земли. При достаточно высокой стабильности несущей частоты радиомаяка, что имеет место с радиомаяками 406 МГц, которые спроектированы специально с этой целью, истинное решение определяется за один проход ИСЗ. Для радиомаяков 121 МГц эта неоднозначность разрешается в результате второго прохода.
В соответствии с Межправительственным соглашением, космический сегмент системы “КОСПАС-САРСАТ” должен состоять как минимум из 4 КА, расположенных на полярной круговой орбите.
В настоящее время в космическом комплексе системы эксплуатируется 8 КА (4 КА типа КОСПАС и 4 КА типа САРСАТ).
Геостационарный космический сегмент (Геостационарная система поиска и спасения - ГССПС - GEOSAR) состоит из нескольких геостационарных спутников, на которых находятся репитеры системы КОСПАС-САРСАТ. При получении аварийного сигнала, репитер геостационарного спутника имеет возможность без задержек передать аварийный сигнал на геостационарную станцию приема и обработки информации (ГЕОСПОИ), таким образом, сокращая время доставки аварийного сигнала. Недостатком геостационарного способа передачи аварийного сигнала является невозможность определения местоположения терпящего бедствия объекта.
Главным преимуществом системы НССПС 406 МГц является обеспечение глобальной зоны обслуживания с использованием ограниченного числа спутников на околополярных орбитах. Её основное ограничение состоит в том, что для создания непрерывной зоны обслуживания требуется большое количество спутников, что по причине высокой стоимости не может быть реализовано государствами, обеспечивающими космический сегмент. Это ограничение привело к тому, что участниками Программы КОСПАС-САРСАТ для повышения эффективности системы НССПС 406 МГц были проведены эксперименты по использованию ретрансляторов 406 МГц, установленных на борту геостационарных спутников и совместимых с характеристиками существующих радиобуев 406 МГц.
В феврале 1999 г. США информировали Международную организацию гражданской авиации об изменении вклада США в систему КОСПАС-САРСАТ и объявили об установлении ретрансляторов 406 МГц на геостационарных спутниках по наблюдению за окружающей средой (GOES-W и GOES-E).
Спутники системы ГССПС не обеспечивают обслуживание полярных регионов, но зато обеспечивают практически немедленное оповещение о бедствии от существующих радиобуев 406 МГц, находящихся в зоне их радио видимости, хотя и без определения местоположения, так как отсутствует доплеровский сдвиг частот.
Для использования преимуществ системы ГССПС в 1998 г. были введены новые типы аварийных радиобуев 406 МГц со встроенным спутниковым навигационным приемником или интерфейсом для ввода данных о местоположении от внешнего источника, позволяющие передавать данные о местоположении на частоте 406 МГц в цифровом сообщении радиобуя, поэтому системы ГССПС и НССПС дополняют друг друга.
В настоящее время ГЕОСПОИ официально введены в эксплуатацию и осуществляют прием, обработку и распределение поисково-спасательным службам аварийной информации 406 МГц.
Система ГССПС 406 МГц включает в себя:
- ретрансляторы 406 МГц на борту четырех геостационарных спутников, плюс 2 в резерве;
- ГЕОСПОИ в восьми странах (см. рис. 25.38), включенные в сеть КЦС КОСПАС-САРСАТ для распределения аварийных данных ГССПС;
- более 314000 существующих аварийных буев 406 МГц.
Система КОСПАС-САРСАТ наглядно показала, что элементы ГССПС (GEOSAR) и НССПС (LEOSAR) не противоречат, а эффективно дополняют друг друга. К примеру, система ГССПС может дать почти мгновенный сигнал бедствия в зоне видимости геостационарного спутника, в то время, как система НССПС:
- покрывает полярные районы, находящиеся вне зоны видимости геостационарных спутников;

Рис. 25.38. Размещение геостационарных
станций приёма и обработки информации
- может рассчитать местоположение бедствия, используя метод доплеровского определения координат;
- так как спутники постоянно находятся в движении по отношению к радиобую, система НССПС менее чувствительна к препятствиям, блокирующим передачу сигнала АРБ в данном, конкретном направлении.
Возможности системы НССПС и ГССПС отображены в табл. 25.6.
Табл. 25.6
Канал обработки |
НССПС |
ГССПС |
406 МГц |
1. Идентификация радиобуя и определение местоположения. 2. Глобальная зона покрытия, но задержка по времени. |
1. Идентификация радиобуя, определение местоположения (при встроенном GPS) 2.Мгновенная передача сообщения о бед-ствии в зоне видимости геостационарного спутника |
121.5 МГц |
1. Местоположение аварийного радиобуя 2.Отсутствие идентификации радиобуя 3.Только местная зона видимости |
Не поддерживается |
Наземный сегмент состоит из комплекса станций НИОСПОИ и ГЕОСПОИ и предназначен для приема от БРК ИСЗ ретранслированных сигналов радиобуя, обработки этих сигналов для определения координат АРБ, выделения аварийного сообщения и передачи этих данных через КЦС в спасательно-координационные центры (СКЦ). Расположение геостационарных станций приёма и обработки информации (ГЕОСПОИ) показано на рис. 25.38. Расположение низкоорбитальных станций приёма и обработки информации (НИОСПОИ) показано на рис. 25.39.
Рис.25.39. Расположение низкоорбитальных
станций приёма и обработки информации
КОСПАС-САРСАТ
Аварийные данные КОСПАС-САРСАТ, генерируемые на НИОСПОИ и ГЕОСПОИ, направляются на соответствующие Спасательно-координационные центры (СКЦ RCC) в соответствии с рассчитанным местоположением бедствия и/или кода радиобуя. Ввиду высокой избыточности наземного сегмента (каждая работающая СПОИ способна выдавать по существу одни и те же данные о глобальном режиме), подобное распределение данных должно координироваться и избыточные данные должны отфильтровываться из наземной сети связи.
Каждая СПОИ связана с соответствующим Координационным центром системы (КЦС-МСС) и аварийные сообщения направляются в соответствующий СКЦ через сеть связи СКЦ в соответствии с процедурами, описанными в документе C/S A.001 (Cospas-Sarsat Data Distribution Plan).
Для распределения аварийной информации КОСПАС-САРСАТ установил пять районов распределения данных (Data Distribution Regions DDRs), которые поддерживаются узловыми КЦС (см. рис. 25.40, 25.41). В каждом районе распределения данных может быть несколько КЦС, отвечающих за распределение аварийных данных в своих специфических географических районах (зона обслуживания КЦС). Аварийные сообщения направляются по сети распределения данных КОСПАС-САРСАТ на тот КЦС, который отвечает за район, где было обнаружено срабатывание аварийного радиобуя. Данный КЦС отвечает за передачу аварийных данных на соответствующих СКЦ или точку контакта для поиска и спасания (ТКПС). Аварийные сообщения, которые должны быть распределены вне данного района распределения данных, направляются через узловые КЦС на соответствующий КЦС, отвечающий за данный район обслуживания. КОСПАС-САРСАТ разрешает использование дополнительных двухсторонних соглашений между КЦС для упрощения в определенных случаях передачи аварийной информации.
Рис. 25.40.
Районы распределения данных КОСПАС-САРСАТ

Каждый КЦС КОСПАС-САРСАТ отвечает за распределение всех аварийных данных в своей зоне обслуживания. Зона обслуживания КЦС включает в себя авиационные и морские поисково-спасательные районы (ПСР), в которых национальные власти КЦС способствуют или представляют поисково-спасательные услуги, а также такие регионы других стран, с которыми национальные власти КЦС имеют соглашение по предоставлению аварийных данных КОСПАС-САРСАТ. Устанавливаемые зоны обслуживания КЦС координируются государствами, обеспечивающими наземный сегмент КОСПАС-САРСАТ, принимая во внимание следующее:
- географическое расположение и общность границ ПСР
- связные возможности
- существующие национальные положения по поиску и спасению, а также существующие двухсторонние договоренности.

Рис. 25.41. Координационный центр системы
КОРСПАС-САРСАТ
Согласованные зоны обслуживания КОСПАС-САРСАТ описаны в документе C/S A.001 (Cospas-Sarsat Data Distribution Plan). Когда обнаружены сигналы от АРБ вне зоны обслуживания данного КЦС, аварийные данные передаются в КЦС, который ответственный за зону обслуживания, где находится радиобуй, или же информация отфильтровывается, если уже была получена из другой(ого) СПОИ/КЦС.
Обмен аварийными сообщениями КОСПАС-САРСАТ между КЦС осуществляется в соответствии со стандартными форматами сообщений. Детальная структура сообщений для распределения аварийных данных и системной информации описаны в документе A.002 (Cospas-Sarsat Mission Control Centres Standard Interface Description) (SID).
Форматы SID КОСПАС-САРСАТ были разработаны с целью возможности передачи аварийных сообщений через любые системы связи, согласованные между КЦС, а также между КЦС и их СКЦ и ТКПС. Аварийные сообщения в формате SID могут отправляться и обрабатываться КЦС автоматически или вручную.
В дополнении к телефонному каналу от всех КЦС КОСПАС-САРСАТ требуется доступ, по крайней мере, к двум международным сетям связи для передачи аварийных сообщений, обеспечивая при этом максимальную доступность и достаточную гибкость при обмене аварийными данными. КЦС передают аварийные сообщения в другие КЦС, ТПКС или СКЦ, используя следующие системы связи:
- международный телекс;
- сеть авиационной фиксированной связи (АФТН) гражданской авиации;
- сеть пакетной передачи данных (X.25).
Адреса АФТН, телексные номера, номера телефонов и факсов приводятся в документе C/S A.001 (Cospas-Sarsat Data Distribution Plan).
25.6.2. Аппаратура потребителей – аварийный радиобуй АРБ – 406
Аварийный радиобуй
(АРБ) является
основным сегментом системы. Он размещается
непосредственно на объекте и служит
источником аварийного сообщения. АРБ
предназначен для передачи сигнала
бедствия в случае в озникновения
аварийной ситуации (рис.25.42).
озникновения
аварийной ситуации (рис.25.42).
Система КОСПАС-САРСАТ способна обраба-тывать аварийную информацию от радиобуев сле-дующего типа:
- аварийных передатчиков-указателей положе-ния (АРМ-ELTs) при авиационном использовании.
- аварийных радиобуев-указателей местополо-жения (АРБ-EPIRBs) при морском использовании.
-
Рис. 25.42.
Разновидности радиобуёв системы
КОСПАС-САРСАТ
Типично морской АРБ представляет собой закреплённый в кронштейне или устройстве автома-
тического отделения аварийный радиобуй (блок радиомаяка (РМ), укомплектованный блоком питания), который приводится в действие вручную либо, при погружении в воду, автоматически с помощью устройства автоматического отделения. После отделения и включения, радиобуй осуществляет передачу аварийной информации, содержащей код страны, тип протокола пользователя, а так же идентификационный (опознавательный) номер буя, по которому в координационном центре системы (КЦС) КОСПАС-САРСАТ производится опознавание объекта, оснащенного данным АРБ.
Термин радиобуй является условным для обозначения любого типа источника сигналов. На практике это могут быть различные устройства: свободно плавающие на воде, установленные на палубе судна, переносимые вручную экипажами судов. Как правило, понимают автоматически включающиеся устройства.
АРБ-406 является аварийным буём нового поколения. Данный буй был специально спроектирован для радиосистем построенных по типу измерения доплеровского сдвига радиочастот.
Преимуществами данного буя является:
- улучшенная точность Доплеровского определения местоположения;
- улучшенная способность устранения неоднозначности;
- увеличение пропускной способности системы (возможность обрабатывать большее число АРБ, передающих одновременно);
- увеличение глобальности;
- уникальная идентификация каждого АРБ;
- наличие в аварийном сообщении информации о бедствии.
Системные характеристики АРБ также значительно улучшены за счет повышения стабильности частоты задающего генератора 406 МГц и использования специально выделенной частоты. Данные радиобуи каждые 50 секунд излучают посылку мощностью 5 Вт и длительностью примерно 0,5 сек. При этом, несущая имеет очень высокую стабильность по частоте и модулирована по фазе, а посылка содержит информацию в цифровом виде. Стабильность частоты обеспечивает точность определения координат источника сигнала, а высокая выходная пиковая мощность повышает вероятность обнаружения сигнала. За счет большой скважности передачи посылок, система обладает способностью одновременно обрабатывать сигналы от более чем 90 передающих радиобуев, находящихся в зоне видимости низкоорбитального спутника. За счет этого также снижаются требования к источнику питания АРБ.
Важной особенностью аварийных радиобуев 406 МГц является наличие кодированного цифрового сообщения, в котором содержится такая информация, как код страны регистрации объекта, идентификатор терпящего бедствие морского или воздушного судна и, на факультативной основе, данные о координатах, полученные от встроенного или внешнего навигационного устройства (GPS/GLONASS).
В АРБ 406 МГц может быть встроен вспомогательный передатчик (приводной маяк) для использования его поисково-спасательными службами при осуществлении наведения на радиобуй.
25.6.3. Перспективы развития системы КОСПАС-САРСАТ
Используемая технология в радиобуях АРБ 121,5 не может быть улучшена достаточно простым способом, что является причиной большого числа аварийных ложных срабатываний (более 98% срабатываний аварийных АРБ на частоте 121,5 МГц – ложные). Данная ситуация снижает эффективность ПСО и увеличивает нагрузку на СКЦ.
В 1999 г. Объединенная рабочая группа ИМО/ИКАО по поиску и спасанию, а также подкомитет по спасанию COMSAR одобрили предложение прекратить спутниковую обработку сигналов на частоте 121,5 МГц с 2008 г. Аэронавигационная комиссия ИКАО также рекомендовала обязательную установку аварийных передатчиков-указателей положения (АРМ) 406 МГц на борту новых воздушных судов начиная с 2002 года, а на всех коммерческих воздушных судах с 2005 года.
В ответ на просьбу ИМО и рекомендации ИКАО комиссия КОСПАС-САРСАТ инициировала план о полном прекращении работы системы КОСПАС-САРСАТ на частоте 121.5 МГц с 2009 г.
Среднеорбитальная система КОСПАС-САРСАТ (MEOSAR).
США, Россия и Европейская комиссия/Европейское космическое агентство (EC/ESA) в настоящее время разрабатывают возможность установки поисково-спасательного оборудования 406 МГц на среднеорбитальные (MEO) системы определения местоположения (GPS, GLONASS и GALILEO). В настоящее время подтверждена совместимость существующих систем с оборудованием АРБ-406 МГц.
В спецификации КОСПАС-САРСАТ на радиобуи 406 МГц и станции приёма и обработки информации (СПОИ) были внесены изменения для обеспечения факультативного кодирования информации о координатах в передаваемом цифровом сообщении радиобуя. Получили одобрения первые две модели радиобуев с такой возможностью. В конце 2001 г. 124 моделей радиобуев (АРМ, АРБ, ПРБ), способных воспринимать данные о местоположении от встроенных или внешних навигационных устройств, в основном от приемников GPS, получили сертификаты одобрения типа.
Радиобуи, использующие протоколы с координатами, позволяют значительно улучшить обработку аварийных сообщений, полученных через полярно-орбитальные спутники КОСПАС-САРСАТ, предоставляя информацию о местоположении, когда на СПОИ получено недостаточное количество посылок для вычисления координат места аварии при традиционной Доплеровской обработке. При использовании же геостационарных спутников значимость радиобуев, использующих протоколы с координатами, значительно повышается. Геостационарные спутники значительно ускоряют обнаружение аварийного сигнала и передачу сообщений о нём, так как они имеют непрерывную зону обслуживания. Но так как эти спутники являются стационарными относительно аварийного радиобуя, Доплеровская обработка для вычисления местоположения радиобуя не может применяться. С информацией о координатах передаваемых самим радиобуем, данное ограничение снимается.
Принимая во внимание ожидаемое увеличение количества радиобуев 406 МГц и влияние, которое оно может оказать на пропускную способность системы ГССПС из-за недостаточного частотного распределения, советом КОСПАС-САРСАТ принято решение, что несущая частота новых моделей эксплуатационных радиобуев 406 МГц должна быть перенесена на частоту 406,028 МГц (в настоящее время все эксплуатационные радиобуи излучают на частоте 406,025 МГц).
В настоящее время, в частотном диапазоне 406.0-406.1 (выделен Международным Союзом Электросвязи для системы КОСПАС-САРСАТ) выделено 3 канала:
- канал А (Channel A) на частоте 406.022 МГц для референсных АРБ (тестовые буи)
- канал B и С (Channel B and C) на частотах 406.025 и 406.028 выделены для рабочих АРБ
Также планируется с ростом количества АРБ-406 использовать канал F (Channel F) с частотой 406.037 МГц.
Спутник МЕТЕОСАТ второго поколения (METEOSAT SECOND GENERATION - MSG), как элемент системы ГССПС (GEOSAR).
Первый спутник MSG-1 организации EUMETSAT был запущен с мыса Куру 28 августа 2002 г. и в настоящее время занимает временную позицию примерно 10.5 W. В настоящее время спутник проходит этап тестирования и начального ввода в эксплуатацию и в дальнейшем будет перемещен на другую, постоянную точку стояния.
Спутник MSG-1 займет позицию между спутниками GOES-E и INSAT и станет частью системы ГССПС КОСПАС-САРСАТ, при этом «покрыв» всю европейскую часть континента (см. рис. 25.43).

Рис. 25.43. Перспективное развитие системы
КОСПАС-САРСАТ
Передача аварийных сигналов с АРБ-406 через спутник MSG на спасательно-координационные центры также начнётся только после того, как будут полностью готовы ГЕОСПОИ MSG. В настоящее время, Франция и Испания устанавливают ГЕОСПОИ для работы с MSG-1. К ним планируют присоединиться Алжир, Греция, Италия, Норвегия и Англия (UK).
Индийский геостационарный спутник нового поколения INSAT-3A был запущен 10 апреля 2003 г. и расположился в точке 93.5 E. Первичная функция данного спутника - метеорология и телекоммуникации, но он также оснащен ретранслятором сигналов 406 МГц и заменив спутник INSAT-2B 19 мая 2003 г., вошел в состав геостационарной системы ГССПС. В 2005 г Индией запущен второй спутник серии INSAT-3 оборудованный репитером сигналов 406 МГц (INSAT-3D).