

Накопители на магнитных дисках (мд)
В НМД предусмотрена аналогичная НМЛ возможность последовательного доступа к информации. Накопитель на магнитных дисках сочетает в себе несколько устройств последовательного доступа, причем сокращение времени поиска данных обеспечивается за счет независимости доступа к записи от ее расположения относительно других записей.
Технология НМД
Конструкция НМД сложнее, чем у НМЛ, а, следовательно, выше их стоимость. В НМД в качестве носителей данных используется пакет магнитных дисков (или плоттеров), закрепленных на одном стержне, вокруг которого они вращаются с постоянной скоростью. Поверхность магнитного диска, покрытая ферромагнитным слоем, называется рабочей.
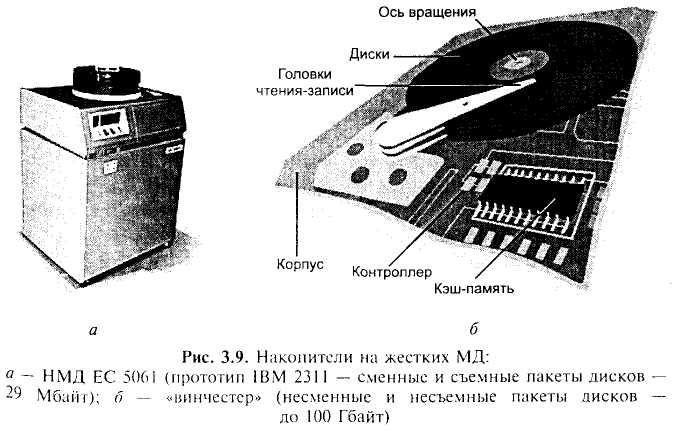
Первые подобные устройства (рис. 3.9, а) были оборудованы сменными пакетами МД. Вставленные в кожух с герметически закрывающимся поддоном, они образовывали компактные единицы хранения, именуемые томами. Наиболее распространенными емкостями томов были 7, 25, 29, 100 Мбайт. Оператор ставил пакет на шпиндель устройства, снимал кожух (при этом пакет автоматически фиксировался на шпинделе) и включал двигатели раскрутки пакета. После достижения определенной скорости вращения осуществляется ввод в пространство между дисками пакета блока магнитных головок («гребенки»). Принцип размещения головок - плавающий, поскольку они удерживаются на необходимом расстоянии от поверхности диска расходящимися потоками воздуха, возникающими при вращении пакета. В дальнейшем в основном применялись или полноконтактные головки (гибкие диски), или механически фиксируемые в вакууме на определенном расстоянии от поверхности («винчестер»). Попытки использовать жидкие среды (различные масла) для обеспечения необходимого размещения головок успеха не имели.
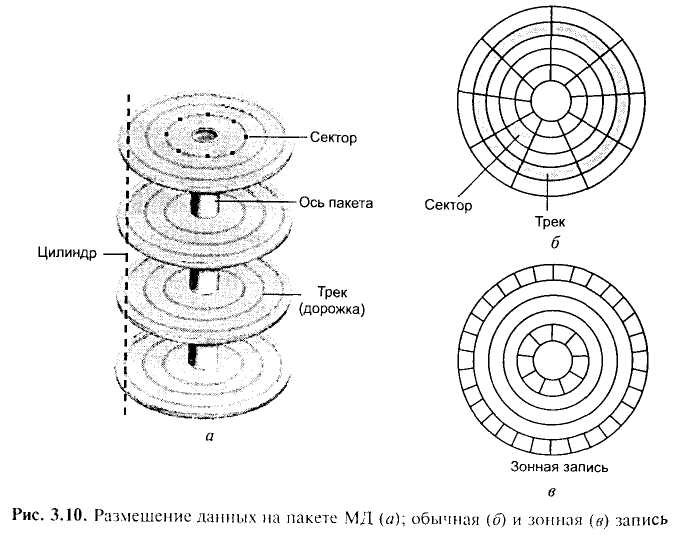
Количество магнитных головок равно числу рабочих поверхностей на одном пакете дисков (рис. 3.10, а). Если пакет состоит из 11 дисков, то механизм доступа состоит из 10 держателей с двумя магнитными головками на каждом из них. Совокупность дорожек, к которым имеется доступ при фиксированном положении блока, называется цилиндром. Держатели магнитных головок объединены в единый блок таким образом, чтобы обеспечить их синхронное перемещение вдоль всех цилиндров. Фиксируя блок механизма доступа на каком-либо из цилиндров, можно сделать переход с одной дорожки на другую данного цилиндра путем электронного переключения головок.
Любая операция чтения (записи) информации с (на) магнитного диска состоит из трех этапов. На первом этапе происходит механический подвод магнитной головки к дорожке, содержащей требуемые данные. На втором этапе обеспечивается ожидание момента, пока требуемая запись не окажется в зоне магнитной головки. На третьем этапе осуществляется собственно процесс обмена информацией между вычислительной машиной и магнитным диском. Таким образом, общее время, затрачиваемое на операцию записи-считывания, состоит из суммы времен поиска соответствующей дорожки, ожидания подвода записи (так называемое время ротационного запаздывания) и обмена с ЭВМ. Максимальное значение времени ротационного запаздывания равно времени, за которое совершается полный оборот магнитного диска.
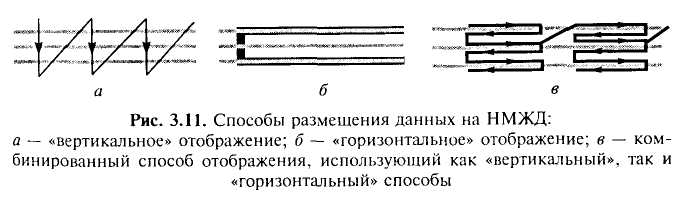
Существует несколько способов физического сохранения данных на жестком диске. Обычные жесткие диски используют «вертикальное» отображение. Данные записываются сначала на одном цилиндре сверху вниз, затем головки переходят на другой цилиндр и т. д. (рис. 3.11). При «горизонтальном» отображении сначала данные записываются последовательно от цилиндра к цилиндру на поверхности одного диска, затем также на поверхности следующего платтера и т. д. Такой способ лучше подходит для записи непрерывного высокоскоростного потока данных, например при записи «живого» видео.
Накопители на жестких магнитных дисках
«Винчестер» - это прозвище разработанного в 1973 г. фирмой IBM накопителя на жестком магнитном диске (НЖМД, или HDD - Hard Disk Drive). Есть несколько версий происхождения названия «винчестер». Приведем некоторые: от названия города Winchester в Англии, в котором филиалом фирмы IBM разработан данный тип накопителя; от маркировки первого жесткого диска, сходной с калибром знаменитой винтовки Winchester (30/30). Здесь тоже две легенды: диск имел емкость 30 Мбайт, время доступа 30 миллисекунд; накопитель состоял из двух дисков по 30 Мбайт каждый.
Конструкция и функционирование устройства. В НЖМД внутри накопителя устанавливается несколько пластин (дисков), или платтеров (см. рис. 3.9, б). Пластины имеют диаметр 5,25 или 3,5 дюйма. В новых разработках пытаются использовать стекло, поскольку оно имеет большее сопротивление и позволит делать диски тоньше, чем алюминиевые аналоги.
Механизм герметически запечатан в корпус с частичным вакуумом внутри. Эту конструкцию часто называют главным дисковым агрегатом (HDA). Среда внутри жесткого диска должна быть очищена от пыли, для этого воздух, попадающий в HDA, пропускается через специальные фильтры. Двигатель, вращающий диск с постоянной скоростью, измеряемой в оборотах в минуту (rpm), включается при подаче питания на диск и остается включенным до снятия питания.
Между пластинами существует расстояние для читающей/записывающей головки, установленной на конце двигающегося рычага. Головка удалена от пластины на долю миллиметра. В первых системах эта дистанция составляла 0,2 мм, на сегодняшний день она сокращена до 0,07 мм. Поэтому малейшее загрязнение может разрушить головку, сблизив ее с диском, а также повредить магнитное покрытие диска.
Головки рассчитаны таким образом, чтобы касаться диска только после его остановки, когда питание отключено. При снижении оборотов вращения воздушный поток ослабевает и, когда прекращается полностью, головка осторожно касается поверхности диска. Точку касания называют зоной посадки LZ (land zone), которая специально предназначена для касания головки и не содержит данных.
Когда диск форматируют на физическом уровне, он разделяется на секторы и дорожки. Физически дорожки расположены друг над другом и образуют цилиндры, которые затем делятся по секторам. В одном секторе 512 байтов. Сектор - минимальная единица измерения размера диска. Все жесткие диски имеют резервные сектора, которые используются его схемой управления, если на диске обнаружены дефектные секторы.
Теоретически внешние цилиндры могут содержать больше данных, так как имеют большую длину окружности. Однако в накопителях, не использующих метод зонной записи, все цилиндры содержат одинаковое количество данных, несмотря на то, что длина окружности внешних цилиндров может быть вдвое больше, чем внутренних. В результате теряется пространство внешних дорожек, так как оно используется крайне неэффективно (см. рис. 3.10, б).
Процесс управления плотностью записи называется прекомпенсацией. Для компенсации различной плотности записи используют метод зонно-секторной записи (Zone Bit Recording), где все пространство диска делится на зоны (восемь и более), в каждую из которых входит обычно от 20 до 30 цилиндров с одинаковым количеством секторов (рис. 3.10, в).
В зоне, расположенной на внешнем радиусе (младшая зона), записывается большее количество секторов на дорожку (120-96). К центру диска количество секторов уменьшается и в самой старшей зоне достигает 64-56. При этом емкость жестких дисков можно увеличить приблизительно на 30%.
С увеличением плотности записи на диск возникают трудности при детектировании пиков аналоговых сигналов, поступающих от магнитных головок. В последнее время для устранения этого недостатка стали применять метод PRLM (Partial Response Maximum Likelihood), в котором используется специальный алгоритм цифровой фильтрации входного сигнала.
Для установки дисковых накопителей в системном блоке предусмотрены специальные монтажные отсеки. Габаритные размеры, соответствующие горизонтальному и вертикальному размерам винчестера, стандартизированы и характеризуются типоразмерами, или форм-фактором (form-factor).
В прошлом контроллер диска не успевал считывать физически смежные секторы, таким образом, диску требовалось совершить полный оборот, прежде чем следующий логический сектор мог считаться. Чтобы уменьшить время ожидания, используется фактор чередования (например, N : 1, когда один сектор считывается, а N пропускаются). В современных НЖМД применяется интегрированный контроллер и собственный буфер данных для повышения быстродействия.
Когда компьютер обращается к данным, операционная система с помощью таблицы файловой системы FAT (File Allocation Table) определяет их положение на диске (в каком секторе, на какой дорожке можно найти запрашиваемые данные).
НЖМД могут содержать от 256 Кбайт до 8 Мбайт кэш-памяти, которая хранит всю информацию о секторах, цилиндрах и предоставляет ее в случае необходимости.
Пластины диска могут выходить из равновесия по причине изменения температуры. Во время воспроизведения мультимедиа это может выразиться в виде внезапных пауз в звуке и потерянных видеокадров. Для предотвращения этого устройство постоянно проводит температурную калибровку. Если сервоинформация расположена среди обычных данных, то термическая калибровка не требуется. Поэтому в большинстве устройств применяют второй вариант.
Характеристики НЖМД. Характеристики жесткого диска очень важны для оценки быстродействия системы в целом. Эффективное быстродействие жесткого диска зависит от ряда факторов (табл. 3.8).
Таблица 3.8. Некоторые характеристики НЖМД |
|
Характеристика |
Пояснения |
Скорость вращения дисков, об/мин, rpm |
НЖМД с интерфейсом EIDE имели скорость около 5400 об/мин, SCSI-НЖМД развивает до 7200 об/мин. В 1999 г. Hitachi перешла барьер в 10 000 об/мин, выпустив Pegasus II SCSI-НЖМД. При скорости вращения 12 000 об/мин данные передаются со средним временем ожидания 2,49 мс |
Время ожидания, мс |
Среднее время доступа к сектору в процессе вращения (время полуоборота) |
Время поиска, мс |
Итоговое время, необходимое для поиска головкой чтения/записи физического расположения данных на диске |
Среднее время доступа дисковода, мс |
Интервал между моментом запроса к данным и моментом доступа к ним, измеряется в миллисекундах (мс). Время доступа включает фактическое время поиска, время ожидания и время обработки данных |
Скорость передачи диска, Мбайт/с |
Скорость, с которой данные передаются на дисковод и считываются с него, зависит от плотности записи |
Скорость передачи данных, Мбайт/с |
Data transfer rate (DTR) - это скорость, с которой данные через шины IDE/EIDE или SCSI передаются на ЦП |
К концу 2001 г. самые быстрые дисководы работали при среднем времени ожидания менее 3 мс, среднем времени поиска в диапазоне от 3 до 7 мс и максимальной скорости передачи данных в районе 50-60 Мбайт/с для EIDE- и SCSI-дисководов соответственно. Для некоторых типов устройств максимальные значения DTR определяются ниже уровня пропускной способности - Ultra ATA/100 и UltraSCSI 160, - которые определены в 100 и 160 Мбайт/с соответственно.
С 1955 г. магнитная запись на жестких дисках постоянно совершенствовалась, чтобы удовлетворять возрастающий спрос. Плотность хранения данных возрастала на 27% в год, а с 1990 г. - на 60% в год. В итоге к концу тысячелетия дисководы способны были хранить информацию в диапазоне 600-700 Мбит/дюйм2.
Первые записывающие головки представляли собой железный сердечник, обмотанный проводом, подобно электромагнитам, которые можно часто встретить на уроках физики в начальной школе. В дальнейшем была открыта тонкопленочная индукция (TFI), которая позволила производить головки чтения/записи в больших количествах по технологии, аналогичной полупроводниковым процессорам.
Эта технология была стандартом до середины 1990-х гг. К этому времени стало невозможно увеличивать плотность хранения данных, увеличивая чувствительность магнитной головки путем добавления TFI-витков на головке, потому что это повышало уровень индуктивности, который ограничивал способность записи данных.
Решение пришло с идеей использования открытого в 1857 г. эффекта анизотропного магнитного сопротивления (anisotropic magne-toresistance - AMR), состоящего в том, что сопротивление ферромагнитного сплава изменяется в магнитном поле.
Возможности повышения емкости и ограничения. Утверждение Б. Гейтса, что «640 Кбайт достаточно для каждого», является наиболее известным примером недостатка интуиции при прогнозе возможных потребностей. В области технологии жестких дисков, по крайней мере, в течение 15 лет имели место десять различных барьеров. Одни из них были результатом непредусмотрительного выпуска BIOS или ОС, ограничений файловой системы FAT, ошибок в аппаратном или программном обеспечении, другие - связаны непосредственно со стандартами жестких дисков. Рассмотрим некоторые из этих барьеров.
Ограничение 528 Мбайт. Ограничение 528 Мбайт было самым печально известным из всех ограничений на вместимость НЖМД, отразившегося на ПК и BIOS, созданных до середины 1994 г. Это произошло из-за ограничения числа адресуемых цилиндров до 1024.
IDE-накопители определяются BIOS по количеству цилиндров, головок и секторов на дорожке, далее эта информация сохраняется в CMOS. Секторы содержат 512 байт, поэтому размер жесткого диска может быть определен умножением количества цилиндров на число секторов и на 512. BIOS воспринимает максимум 1024 цилиндра, 255 головок и 63 сектора и в итоге получается 504 Мбайт (если мегабайт трактовать как 1000000 байтов) или 528 Мбайт (если это 1 048 576 байт, как это и есть на самом деле).
Ограничение 8,4 Гбайт связано с общим пространством адресации, которое было определено для BIOS. До 1997 г. большинство систем PC имело ограничение на обращение к дисководам объемом 8,4 Гбайт или менее. Причина заключалась в том, что хотя интерфейс АТА использовал 28-битовую адресацию, которая поддерживала мощности дисковода до 228х 512 бит или 137 Гбайт, стандарт BIOS int13h наложил ограничение 24-битовой адресации, таким образом, доступ был возможен только к 224 × 512 байт или 8,4 Гбайт.
Снятие ограничения 8,4 Гбайт состояло в расширении стандарта int13h. Новые возможности поддерживали квадро-слово или 64 бита адресации, что означает доступ к 264 × 512 байт или 9,4 × 1021 байт. Это 9,4 Тера-Гигабайтов или больше триллиона дисководов по 8,4 Гбайт. Системы с поддержкой расширенного стандарта BIOS int13h начали создаваться только с середины 1998 г.
Ограничение 137 Гбайт. К началу нового тысячелетия у производителей дисководов и BIOS возникло существенное затруднение, так как предел в 137 Гбайт, наложенный интерфейсом АТА, перестал быть недостижимым. Кажется, что лучше поздно, чем никогда, хотя стандарты могут быть до конца изучены из предыдущих ошибок. Следующая версия EIDE - протокол (АТА-6), рассмотренный комитетом ANSI осенью 2001 г., использует 48 бит адресного пространства, позволяя работать с максимальным размером адреса в 144 PByte (Petabyte). Это уже в 100 тыс. раз выше, чем текущий барьер и, по сравнению с предыдущим случаем, будет достаточным, по крайней мере, в течение следующих 20 лет.
Файловые системы
Метод, которым данные организованы на жестком диске (здесь он называется том, volume), определен используемой файловой системой (см. также [22]). Файловые системы обычно зависят от операционной системы и большинство из них совместимы с Microsoft Windows.
Файловая система FAT впервые использовалась в MS-DOS (1981 г.). Цель FAT в распределении кластеров памяти в терминах цилиндр/сектор/дорожка - форма адресации, используемая контроллером жесткого диска.
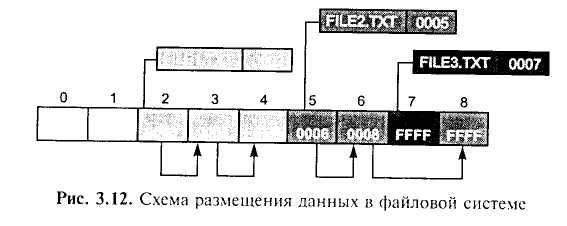
FAT содержит данные для каждого файла на НЖМД. Каждый кластер содержит указатель на следующий кластер файла или индикатор конца файла. На рис. 3.12 показаны три файла: FILE1.TXT использует три кластера; FILE2.TXT - фрагментированный файл, которому требуется три кластера; FILE3.TXT занимает один кластер. В каждом случае таблица размещения файлов содержит указатель на первый кластер файла.
Первая реализация системы FAT известна как FAT 12, которая поддерживала максимальный размер раздела в восемь мегабайт. Она была заменена в 1984 г. на FAT 16, которая поддерживала максимальный размер раздела в 2 Гбайта. С годами FAT16 подвергалась множеству модификаций, например для работы с именами файлов длиннее, чем стандартное ограничение в 8+3 символа (восемь - для названия, три - для типа или расширения), и т. д.
Главное ограничение системы FAT16 заключалось в том, что она использует ограниченное число кластеров на раздел, это означает, что чем больше жесткий диск, тем больше размер кластера и тем больше неиспользованного пространства на диске. Самым большим ее преимуществом было то, что она совместима с широким рядом операционных систем: Windows 95/98/Me, OS/2, Linux и некоторыми версиями UNIX.
Со времени выхода версии Windows 95 Servise Release 2 (OSR2) ОС Windows поддерживала обе системы - FAT16 и FAT32. Последняя расширена по сравнению с FAT16 тем, что предусматривает намного большее количество кластеров на раздел, что обеспечивает значительно более рациональное использование дискового пространства, чем FAT16. Тем не менее FAT32 содержит все остальные ограничения FAT16. Кроме того, многие операционные системы, поддерживающие FAT16, не работают с FAT32. Например, Windows NT может работать с данными (хранящимися в FAT32) только через сеть, когда данные хранятся на другом компьютере в сети, с более ранней версией Windows.
С выходом Windows XP в октябре 2001 г. широкое распространение получила NTFS, совершенно иная файловая система по сравнению с FAT, которая впервые была введена с выходом Windows NT в 1993 г. Разработанная для преодоления многих недостатков FAT, NTFS также обеспечивает новые возможности в сфере безопасности и кодирования.
Системы FAT16, FAT32 и NTFS используют разные размеры кластера в зависимости от объема, и каждая из них имеет максимальное количество кластеров, которое может поддерживаться. Меньший размер кластера позволяет более эффективно использовать дисковое пространство, так как незанятое место внутри кластера не может быть использовано другими файлами; чем больше кластеров поддерживается, тем большие размеры томов или разделов могут быть созданы. В табл. 3.9 приводится сравнение размеров кластеров, используемых ОС Windows при разных объемах диска.
Таблица 3.9. Размеры кластеров различных ФС |
|||
Обьем диска (тома) |
FAT 16 |
FAT32 |
NTFS |
7-16 Мбайт |
2 Кбайт |
Не поддерживается |
512 байт |
17-32 Мбайт |
512 байт |
Не поддерживается |
512 байт |
33-64 Мбайт |
1 Кбайт |
512 байт |
512 байт |
65-128 Мбайт |
2 Кбайт |
1 Кбайт |
512 байт |
129-256 Мбайт |
4 Кбайт |
2 Кбайт |
512 байт |
257-512 Мбайт |
8 Кбайт |
4 Кбайт |
512 байт |
513 Мбайт-1 Гбайт |
16 Кбайт |
4 Кбайт |
1 Кбайт |
1 - 2 Гбайт |
32 Кбайт |
4 Кбайт |
2 Кбайт |
2-4 Гбайт |
64 Кбайт |
4 Кбайт |
4 Кбайт |
4-8 Гбайт |
Не поддерживается |
4 Кбайт |
4 Кбайт |
8-16 Гбайт |
Не поддерживается |
8 Кбайт |
4 Кбайт |
16-32 Гбайт |
Не поддерживается |
16 Кбайт |
4 Кбайт |
32 Гбайт-2 Тбайт |
Не поддерживается |
Не поддерживается |
4 Кбайт |
Магниторезистивные (MR-) технологии
В 1991 г. IBM разработала технологию AMR, позволяющую создавать MR- (магниторезистивные) головки, работающие в области плотной записи, способствующие развитию характеристик жестких дисков. Новые головки превосходили своих TFI-предшественников тем, что у предшественников элементы чтения записи были разделены, позволяя друг другу выполнять свои функции независимо.
«MR-эффект», обнаруженный в 1988 г., состоит в том, что в MR-материале (например, ферроникелевый сплав), электроны проводимости имеют ограниченную свободу (более частые столкновения с атомами) при их движении под действием магнитного поля. Когда электроны двигаются менее свободно, сопротивление материала выше. Датчики GMR используют представления квантовой механики, где спин (вектор вращения) электрона может иметь два направления - вверх и вниз (рис. 3.13).
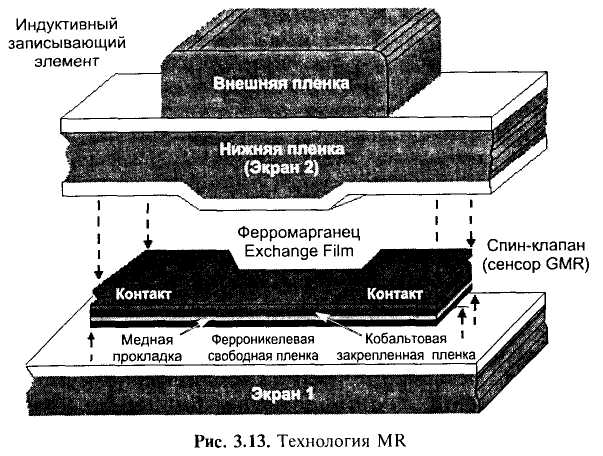
Электроны с направлением вращения, параллельным направлению магнитного поля, двигаются свободно, производя низкое сопротивление. Наоборот, при движении электронов против действия магнитного поля электроны имеют частые столкновения, создавая более высокое сопротивление. IBM разработала структуры, определенные как спин-клапаны, в которых одна магнитная пленка закреплена (направление магнитного поля определено), а вторая магнитная пленка или магнитный датчик имеет свободную магнитную ориентацию. Это очень тонкие пленки, расположенные очень близко друг к другу, позволяя электронам любого направления вращения двигаться вперед и назад между ними. Изменения магнитного поля, исходящего от диска, вызывают изменение магнитной пленки датчика, который, в свою очередь, изменяет сопротивление всей структуры. Низкое сопротивление возникает, когда датчик и скрепленные пленки ориентированы в одном и том же направлении, в этот момент электроны в обеих пластинах свободно вращаются в одном направлении.
Более высокое сопротивление возникает, когда ориентация магнитного датчика и скрепленных пластин противоположны, потому что движение электронов или направление движения препятствуют ДРУГ другу. Датчики GMR могут использоваться в значительно более высоких величинах плотности данных, чем MR-датчики, потому что относительное изменение сопротивления здесь больше. Поэтому GMR-датчики более чувствительны к магнитным полям диска.
В MR-головках пишущий элемент - обычная TFI-головка, в то время как элемент чтения состоит из тонкой полоски магнитного материала (рис. 3.13). Сопротивление полоски изменяется в присутствии магнитного поля, производя сильный сигнал с низким шумом, что дает существенное повышение плотности. При чтении MR имеет большую чувствительность, обеспечивая четкость сигнала при прохождении дорожки на поверхности диска. Более того, данная технология обеспечивает работу при плотном расположении большого объема данных на поверхности диска. Такая производительность вызывает свои трудности: необходимо строгое соблюдение мер предосторожности при работе с MR-головками. Кроме того, они чувствительны к загрязнению и подвержены коррозии.
Различные усовершенствования позволяют MR-головкам считывать данные, записанные в 4 раза плотнее и с большей скоростью, чем это может сделать TFI-головка. Это означает, что данная технология обеспечивает плотность до 3 Гбит/дюйм2.
Технология GMR. GMR-технология (Giant Magneto-Resistive) устройства головки чтения/записи основывается на существующих технологиях TFI и MR и позволяет создавать головки с более высокой чувствительностью к переменному магнитному полю диска.
Промышленные версии GMR-дисков имеют плотность записи 4,1 Гбит/дюйм2, в лабораторных условиях достигнуты плотности 10 Гбит/дюйм2. В этих головках толщина датчика 0,04 мкм. IBM планируется сокращение толщины до 0,02 мкм, что позволит достигнуть плотность хранения 40 Гбит/дюйм2.
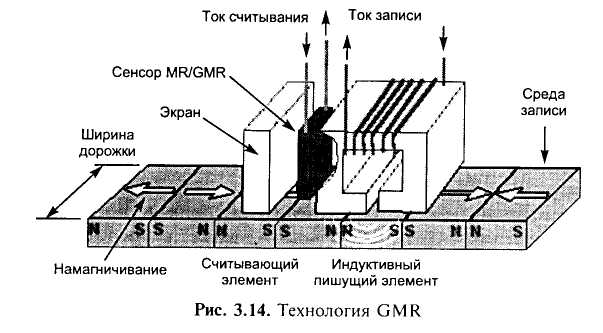
IBM производит универсальные головки чтения/записи по технологии GMR с 1992 г. Они состоят из тонкой индуктивной пленки, пишущего и читающего элемента (рис. 3.14). Элемент чтения состоит из GR- или GMR-датчика между двумя магнитными экранами. Магнитные экраны защищают от воздействия внешних магнитных полей, поэтому GMR по существу «видит» только магнитное поле данных, которые читает.
RAID
В 1980-х гг. мощности дисководов были ограничены и более мощные устройства стоили намного дороже. В качестве альтернативы отдельным дорогостоящим и высокопроизводительным устройствам разработчики накопителей начали экспериментировать с наборами менее дорогих НЖМД меньшей емкости. В 1988 г. появился термин RAID - (Redundant Array Of Inexpensive Disks) избыточный массив недорогих дисков. Такой массив, как предполагалось, должен иметь лучшие показатели, чем индивидуальный НЖМД. Проблема, однако, состояла в том, что среднее время наработки на отказ (MTBF) массива дисков уменьшалось из-за возможности выхода из строя любого устройства. Последующее развитие имело следствием спецификацию шести стандартизированных уровней RAID, чтобы обеспечить баланс защиты данных и работы.
Уровень 0 подразумевает «расщепление данных» без избыточности (размещение блоков каждого файла на различных дисках). Это улучшает работу, но не способствует устойчивости к ошибкам. RAID 0 образует «полосы» (виртуальные дорожки), проходящие в нескольких дисководах, что позволяет параллельно получать данные от нескольких устройств.
Уровень 1 подразумевает зеркальный диск - метод, при котором данные записываются на двух дисках одновременно, так, чтобы если один из дисководов дает сбой, то система могла немедленно переключиться к другому диску без всякой потери данных. RAID 1 имеет лучшие характеристики и устойчивость к ошибкам, но это осуществляется за счет мощности используемых дисководов (здесь дублирование составляет по меньшей мере 100%).
Уровень 3 - аналогичен уровню 0, но при уровне 0 вместимость меньше при том же количестве дисководов. Здесь достигается более высокий уровень целостности данных или устойчивость к ошибке путем выделения одного тома (дисковода), используемого для исправления ошибочных данных.
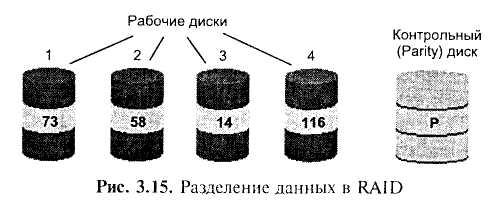
Уровень 5 - наиболее используемый, обеспечивает разделение данных на уровне байта, а также разделяет информацию для исправления ошибки. На уровнях 3 и 5 избыточная информация представляет собой контрольные данные (например, циклические контрольные суммы блоков или биты контроля четности байтов), которые заносятся на выделенный для этих целей избыточный дисковод (избыточность в диапазоне от 10 до 33%).
Рисунок 3.15 иллюстрирует концепцию разделения данных в RAID, блок со значениями 73, 58, 14 и 126 может быть разделен массивом RAID 3, включающим четыре дисковода данных и контрольный том, использующий контроль четности.
Такая структура может гарантировать улучшенную работу по сравнению с отдельным дисководом и если размер полосы соответствует типу прикладной программы, то:
в системах, ориентированных на запросы, с большим потоком транзакций или операций ввода-вывода, где доминируют многократные параллельные запросы к небольшим объемам данных, предпочтительны большие (порядка блока) полосы;
в системах, ориентированных на данные, где хранятся большие объемы данных, целесообразно использовать небольшие полосы данных (порядка байта). Если запись расположена на множестве нескольких дисководов, то она может быть прочитана по частям, параллельно, что увеличивает скорость передачи данных.
Цены на НЖМД за последние годы значительно снизились, так что теперь уже неуместно говорить как о «недорогих» лишь о дисках, составляющих RAID-массив. Поэтому термин RAID сейчас переопределен как массив «независимых (independent) дисков».
Системы SMART
В 1992 г. IBM начала производить 3,5-дюймовые НЖМД, которые могли предсказать сбой при работе, снабженные средством, прогнозирующим отказы (Predictive Failure Analysis - PFA). При этой технологии периодически измеряются определенные характеристики работы дисковода, например расстояние от головки до диска и посылаются предупреждения, когда некоторый порог превышен. Есть два вида отказов жесткого диска: непредсказуемый и предсказуемый. Непредсказуемые отказы случаются быстро, без заблаговременного предупреждения. Эти отказы могут быть вызваны статическим электричеством, повреждением или тепловыми проблемами. Фактически 60% отказов двигателя являются механическими, часто вызванными износом двигателя (см. табл. 3.8).
Идея SMART (Self-Monitoring Analysis and Reporting Technology - технология самоанализа и информирования) заключается в создании механизма предсказания возможного выхода из строя НЖМД и предотвращения тем самым потери данных. SMART была предложена фирмами COMPAQ и IBM и включена в версию стандарта ANSI ХЗТ10.
Для анализа надежности НЖМД используются две группы параметров (здесь и далее подразумевается диск, поддерживающий SMART-технологию). Первая характеризует параметры естественного старения жесткого диска:
количество циклов включения/выключения (старт/стоп);
количество оборотов двигателя за время работы;
количество перемещений головок.
Вторая группа параметров информирует о текущем состоянии качества накопителя:
высота головки над поверхностью диска;
скорость обмена данными между дисками и кэш-памятью на диске;
количество переназначений плохих секторов (когда вместо испорченного сектора подставляется свободный исправный);
количество ошибок поиска;
количество операций перекалибровки;
скорость поиска данных на диске.
Типичные дефекты жесткого диска и способы их предсказания приведены в табл. 3.10.
Таблица 3.10. Данные о дефектах жесткого диска |
||
Вид дефекта |
Симптом/Чем вызван |
Что предсказывает |
Большое количество плохих секторов |
Физические дефекты поверхности, повреждения при транспортировке |
Количество дефектов поверхности, скорость их роста |
Чрезмерный шум |
Дефект мотора, повреждения при транспортировке |
Диагностика |
Значительное количество нерегулярных ошибок |
Повреждение головки или ее загрязнение |
Частые повторы при обращении к диску, срабатывание схемы ЕСС контроля |
Отказ мотора |
Не вырабатывается сигнал готовности, нет шума вращения дисков/ Дефект мотора, повреждения при транспортировке |
Повторы включения, увеличение времени набора номинальной скорости вращения |
Диск не отвечает (эффект такой же, как при отсутствии диска) |
Дефект электроники диска |
Ничто не может предсказать катастрофу в данном случае (к сожалению) |
Ошибки позиционирования серводвигателя |
Большое количество ошибок перемещения головок/Повреждения при транспортировке |
Ошибки позиционирования, частые повторы калибровки |
Сбой работы головки, резонанс при ее перемещении |
Значительное количество нерегулярных ошибок |
Рост ошибок при чтении, а также ошибок позиционирования |
В силу некоторой ограниченности технологии SMART (пользователь оказывается перед свершившимся фактом - «диск почти сломался, его осталось только заменить») появились расширения способов предотвращения потери данных, разработанных отдельными фирмами-производителями жестких дисков.
Основная идея технологии Data Lifeguard фирмы Western Digital - проверка через каждые 8 ч работы поверхности всего диска, выявление секторов, которые могут стать сбойными, и перенос информации в резервные области диска. Все эти операции выполняются в паузах (которые составляют до 90% времени работы диска) и не снижают производительность компьютера. Совместимость с системой SMART полностью сохраняется.
Фирма Quantum применила свою технологию Data Protection System (DPS), которая отличается от Data Lifeguard доступной через Internet программой диагностики, позволяющей выявить возможные дефекты и во многих случаях устранить их.