

Угловые перемещения колесной пары
Одной из причин колебаний вагона является виляние (извилистое движение). Как известно, между ребордами колес и рабочими гранями рельсов существуют зазоры, за счет которых колесная пара при своем движении может постепенно переходить от контактирования гребнем правого колеса с правым по ходу рельсом к контактированию гребнем левого колеса с левым рельсом.
Поскольку колесная пара при движении непрерывно перемещается поперек колеи ( в пределах указанного выше зазора), то ось колесной пары при конической форме колес совершает угловые колебания вокруг оси х (угол φ), и шейки оси то поднимаются, то опускаются на некоторую величину z. Эти колебания также передаются затем другим элементам вагона.
Колебания вагонов вызываются также действием сил, возникающих при входе вагона в кривые участки пути и в стрелочные кривые, от порывов ветра, аэродинамических толчков воздуха в боковую поверхность вагонов при встрече поездов и по некоторым другим причинам.

Виды колебаний
В линейных колебательных системах известны два вида колебаний:
Собственные колебания – происходят в изолированных колебательных системах вследствие какого-либо начального возмущения; в процессе самих собственных колебаний никакие внешние дополнительные возмущения на систему не действуют.
Системы, в которых энергия колебаний расходуется на преодоление сопротивлений среды, называют диссипативными, а системы, у которых энергия в окружающую среду не рассеивается – консервативными.
Вынужденные колебания – в колебательных системах возникают тогда, когда на систему все время действуют возмущающие силы.
Полнее всего изучены, так называемые, гармонические колебания систем, которые описываются обычно уравнением

где z – величина перемещений в колебательном процессе;
А - амплитуда колебаний; ωt +α – фаза колебаний;
ω - угловая частота колебаний;
t - время;
α - начальная фаза колебаний.
Динамические характеристики верхнего строения пути.
Важной характеристикой верхнего строения пути (ВСП) является жёсткость. Жёсткость пути различна в горизонтальном и вертикальном направлениях, в неодинаковом стыке и середине рельс.
Вертикальная жесткость пути определяется отношением действующей на головку рельса вертикальной нагрузки к вертикальному перемещению точки контакта колеса с рельсом.
Приведенная масса пути – это условная величина, которая представляет собой коэффициент пропорциональности в расчетных уравнениях, связывающих скорость удара колеса по рельсу с максимальной силой соударения.
Горизонтальная жёсткость пути определяется соотношением горизонтальной поперечной (боковой) силы приложенной к головке рельса к вызванному ею отклонению головки рельса от положения в ненагруженном состоянии.
Отклонения от сжатия возникают из-за деформации упругих прокладок между рельсами и шпалами.
Динамические свойства пути описывают с помощью модели, которые учитывают его упругие, диссипативные и инерционные свойства.
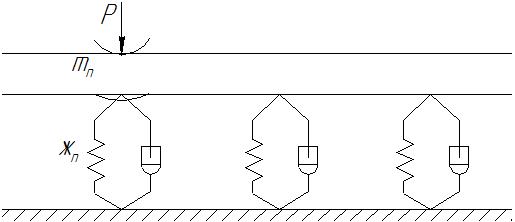
В основном используются две модели пути:
Дисктретная- путь представляется в виде сосредоточенной массы mп приведенная к точке контакта колеса и рельса, пружины жесткостью жп и гидравлического гасителя колебаний с коэффициентом затухания βп.
При выполнении расчетов по этой модели можно принимать значения параметров пути в следующих диапазонах:
mп = 0,3 - 0,8 т;
жп = 35 – 85 МН/м;
βп = 0,2 – 0,8 МН*с/м.
Континуальная – путь как система с распределенными по его длине параметрами (балка на упруго-вязком винклеровском основании, то есть на основании, в котором прогиб проявляется только в точке приложения силы).
Геометрические неровности входящие в эквивалентную геометрическую неровность пути подразделяются на три группы:
Рифли – неровности с длиной волны LB= 0,03- 0,08 м.
Короткие – возникают в кривых радиусах менее 600м, вызываются проскальзыванием одного из колес. LB =0,08 – 0,3м.
Длинные – связаны с прокаткой и правкой рельсов, а также движением разнотипного подвижного состава. LB = 0,3 – 3м.