

Лекция 15.5. Определение динамических моделей тоу
Для определения динамических моделей ТОУ используются аналитический метод, метод приближённых параметров, метод логарифмирования, метод площадей, графоаналитический и метод частотных характеристик.
В практических расчётах, в 1-ом приближении, динамическую модель ТОУ получают в виде последовательного соединения звена запаздывания, апериодического звена 1-го порядка, интегрирующего звена 1-го порядка.
S-образные характеристики статических объектов апроксимируют передаточной функцией вида:
 ;
;
 ;
T1>T2
;
T1>T2
При наличии транспортного запаздывания эти ПФ дополняются звеном запаздывания с τтр. Для получения таких моделей кривую разгона нормируют и приводят к безразмерному виду:

Цель - обеспечение точного совпадения экспериментальной и расчётной кривой разгона в 2-х точках.
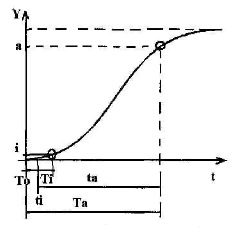
S-образная кривая без транспортного запаздывания.
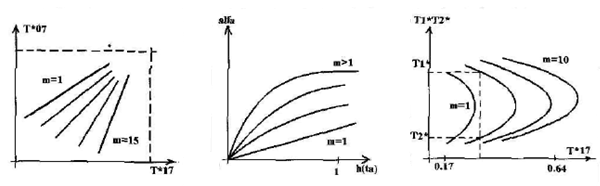
Для определения табличных коэффициентов переходят к безразмерному масштабу времени в относительных еденицах. За базовое время принимают время, за которое выход достигает значения а. (чаще а=0.7)
 - относительное время.
- относительное время.

Если объект имеет запаздывание, то его можно определить из соотношения:
 ,
где
,
где
 ,
,

Для получения модели вида:
Для
заданного значения m по таблицам
определяют Aia, Bia, .
Если кроме точного совпадения требуется,
чтобы модель обеспечивала наиболее
близкое прохождение около 3-ей точки
τij,
то расчёт проводят для нескольких
значений m для обоих пар точек. Степень
m берётся такая, для которых значение
параметров объекта будут наиболее
близкими для обоих пар точек. Но
окончательное значение параметров ОУ
принимаются для той пары точек, в которых
требуется точное совпадение модели и
экспериментальной характеристики.
.
Если кроме точного совпадения требуется,
чтобы модель обеспечивала наиболее
близкое прохождение около 3-ей точки
τij,
то расчёт проводят для нескольких
значений m для обоих пар точек. Степень
m берётся такая, для которых значение
параметров объекта будут наиболее
близкими для обоих пар точек. Но
окончательное значение параметров ОУ
принимаются для той пары точек, в которых
требуется точное совпадение модели и
экспериментальной характеристики.
При i=0.1;0.2 и а=0.7 воспользуемся графиками:

Если запаздывание определено во время эксперимента, то точно можно воспользоваться моделью вида:
.
Эта
модель наиболее точная
 .
.
Здесь апроксимирующая кривая совпадает с экспериментальной в точках с координатой τ0. Для прохождения кривой вблизи точки τij расчёт повторяют для разных m.
Метод последовательного логарифмирования
Задача метода - определение коэффициентов дифференциального уравнения объекта и его порядка при известном коэффициенте передачи объекта.
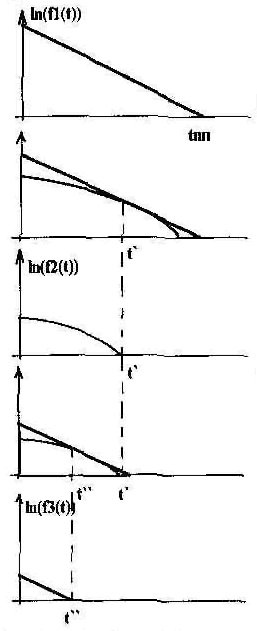
Если кривая ПП имеет вид апериодического звена 1-го или 2-го порядка, то все корни характеристического уравнения - вещественные и лежат слева от мнимой оси. Решение уравнения при нулевых начальных условиях имеет вид:

При t близком ко времени переходного процесса в конце ПП экспоненты с большими α будут равны или близки к нулю.




Если есть экспоненты с большими показателями степени, тогда форма линии будет непрямой. Тогда проводим касательную к хвостовой части:
 ,
,

На
участке (0; t’)
действует только

Если линия непрямая то проводим касательную и коэффициенты:
 ,
,

Тогда есть экспоненты:

 ,
,
Если не удаётся получить при последовательном логарифмировании прямой линии в полулогарифмическом масштабе, то надо перейти к другому методу идентификации. Обычно это происходит при существующей паре корней близко расположенных друг к другу.
Если есть транспортное запаздывание, то перед обработкой модели надо выделить звено чистого запаздывания. Тогда начало отсчёта переносится на время запаздывания.
 ,
,

Найденные Сi, должны удовлетворять системе уравнений:



…
