

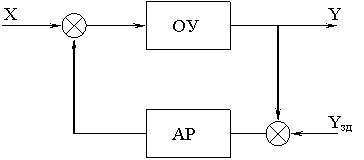
Расширенные частотные характеристики автоматических регуляторов:
П-регулятор:

В формуле пишем «-» т.к. действие регулятора направлено в противоположную сторону возмущению.
 ;
;
 ;
;

И- регулятор:


 ;
;
ПИ-регулятор:




ПД- регулятор:



ПИД-регулятор:



Для расчета настроек методом РЧХ в литературе приведены формулы. Особенности расчета П-регулятора является то, что есть единственное решение и расчет начинают с определения рабочей частоты исходя из системы уравнений:



Определяют оптимальное значение настройки регулятора:

Для ПИ-регулятора, задавшись m расчетным, строят линию равного затухания в плоскости С0, С1. Левую часть не рассматривают.

Для расчета ПИД-регулятора: при построении линии равного затухания задают несколько значений С2. Находят оптимальные С0 и С1 для каждого случая. Определяют значение критерия по методу наименьших квадратов (I2) и выбирают оптимальные параметры настройки соответствующие минимуму этого критерия.

1. С2=0,
2. С2=а,
3.С2=1,5а,
4.С2=2а m=const
Правильно настроенный ПИД-регулятор должен обеспечивать переходный процесс без перерегулирования (апериодический). Если не устраивает какой-либо вид параметров переходного процесса, надо искать более оптимальные параметры настройки.
Основное требование к регулятору - они должны быть изодромные, т.е. коэффициент передачи - общий, поэтому надо увеличивать качество регулирования, не меняя пропорциональную составляющую. Если же схема регулятора не изодромная, то статическая ошибка остается даже у ПИ регулятора.
Если С2 увеличивать неограниченно, то регулятор будет дёргать исполнительный механизм из-за помех в линиях, следовательно увеличивается износ. Поэтому С2 лучше также не трогать. Поэтому двигаясь внутрь области равного затухания переходного процесса сначала увеличиваем С2 , это может потребовать уменьшения С1 и С0.
Для получения малоколебательного переходного процесса в ПИД регуляторе увеличивают время регулирования.
Лекция 19. Метод незатухающих колебаний (Циглера-Никольса)
Этот метод предусматривает расчет регуляторов исходя из того, что заданное значение m=0. Если в РЧХ заложен определенный запас, то здесь нет. Расчет оптимальных настроек регулятора начинается с определенной критической частоты системы с П-регулятором, которые выводят систему на границу устойчивости. Определяется критическая частота.
На втором этапе определяем оптимальные настройки С0, С1, С2, обеспечиваем степень затухания 0,8-0,9.
Метод Циглера-Никольса исходит из того, что заранее известна КЧХ объекта. Если она известна, то из метода РЧХ можно записать:
 ;
;
Оптимальные настройки:
П-регулятор: 
ПИ-регулятор:
 ;
; 
ПИД-регулятор:
 ;
;
 ;
;
С помощью метода незатухающих колебаний получены приближённые формулы для расчёта параметров промышленных АР по критерию минимума квадратичной ошибки.
Ошибка в качестве переходного процесса только из-за ошибки в точности определения модели.
Наряду с аналитическим методом Циглера-Никольса существует экспериментальный инженерный метод расчета «хороших» параметров регулятора. Для этого разработаны и проверены на практике формулы для расчета регулятора по приближенной модели объекта.
Эта модель состоит из апериодического звена 1-го порядка и звена запаздывания или из апериодического звена 1-го порядка, интегрального звена и звена чистого запаздывания.
В формулу входит значение ωπ, которое означает, что на этой частоте вектор КЧХ объекта поворачивается на 1800.
Метод ЦН применим только к тем САР, в которых имеется звено чистого запаздывания, или для систем, у которых АФЧХ разомкнутой САР пересекает отрицательную вещественную полуось.
Для предварительной оценки критической частоты можно воспользоваться различными графическими зависимостями, приводимыми в справочной литературе.
Недостатком метода Циглера-Никольса является то, что он обеспечивает лишь один тип переходного процесса – с затуханием, равным ψ = 0,8 – 0,9. Другим недостатком метода Циглера-Никольса является ограниченный набор типов законов регулирования (П, ПИ, ПИД).
Метод максимума АЧХ
|
|
|
|
При экспериментальном методе исследования ТОУ оказывается удобно использовать метод, базирующийся не на РЧХ, а на обычных частотных характеристиках. Если параметры настройки АР лежат внутри области, ограниченной линией равного затухания, значит все корни лежат слева от мнимой оси и система обладает вполне определённым запасом устойчивости. Запас устойчивости определяется расстоянием, на котором находится ближайший ко мнимой оси корень. Тогда АФХ системы не охватывает точку (1,j0).
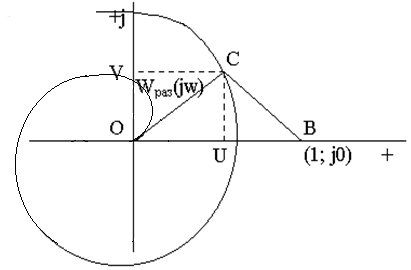

Отношение ОС к ВС дает информацию о запасе устойчивости.
При значении =0 это отношение стремится к 1. При увеличении частоты векторы АФХ поворачиваются, приближаясь к точке (1,j0).
Проведем преобразование:

Сгруппируем по V2 и U2, затем разделим на (М2-1)
На геометрической плоскости это окружность с параметрами:
r
=
 ,
a
=
,
a
=
 - расположение центра
- расположение центра
Индекс М – показатель колебательности, определяет максимум отношения ОС к ВС на определенной частоте. На практике показатель колебательности М принимают 1,2-2,0.


Отклонений больших чем в М раз не будет.
Для
системы 2-го порядка (колебательное
звено) с уществует
однозначная связь между М и m:
уществует
однозначная связь между М и m:

Если затухание переходного процесса определяется 2-мя ближними комплексно сопряженными корнями, то результаты расчетов проведенных по методу РЧХ и максимуму АЧХ будут совпадать.
Ψ 0,65 0,75 0,8 0,9
М 3,09 2,38 2,09 1,55
Можно построить ряд окружностей. Чем больше М, тем меньше радиус, тем ближе он (показатель) приближается к критическому. Максимум замкнутой КЧХ соответствует индексу окружности, который касается КЧХ разомкнутой системы на резонансной частоте. В пределе КЧХ пересекает вещественную ось в точке (1,j0) => модуль
Индекс М определяет границы области, в которую не должна заходить КЧХ разомкнутой системы. Она только касается окружности, определяемой этим параметром.
Если корней много, но интенсивность затухания определяется 2-мя составляющими, то остальные слабо влияют и можно воспользоваться приведенной методикой. Если предположение не оправдывается, то соотношение между М и m нарушается и оба метода РЧХ и макс. АЧХ будут давать значительные отклонения от реальных значений.
Методика расчета автоматической системы регулятора методом максимума АЧХ::
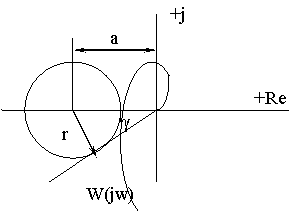
1. Задавшись М строят окружность заданного радиуса r и находящейся на расстоянии от центра координат - а.
2. По КЧХ ТОУ строят семейство КЧХ разомкнутой системы для разных значений Кр, до тех пор, пока не произойдёт касание с окружностью.
Для упрощения расчётов можно воспользоваться обстоятельством, вытекающим из этого метода: проведём из (0,0) прямую под углом к отрицательной вещественной полуоси:
|
|
|
|

1) Построить КЧХ ТОУ.
2) Провести линию под углом.
3) Начертить окружность с центром на вещественной полуоси, касающейся
одновременно и линии под углом и КЧХ ТОУ.
4) Определить Кр предельное.
Полученный Кр надо корректировать с учётом статической ошибки.
П-регулятор. Для расчёта оптимальных параметров настройки АР, исходя из допустимого превышения амплитуды выхода ЗС имеет модель ТОУ в виде КЧХ или передаточной функции. Дано:

ВОТ ТУТ Я ОСТАНОВИЛАСЬ
СЛЕДУЮЩИЙ РИСУНОК 20
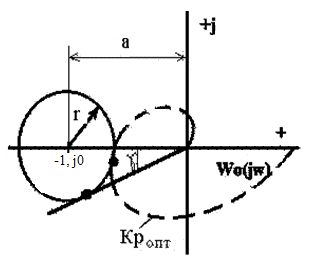
Чтобы не поворачивать векторы КЧХ ТОУ на 180о возьмём передаточную функцию со знаком “+”, тогда критическая точка - (-1, j0).
 ,
,

При Кр=1 КЧХ разомкнутой системы совпадает с КЧХ ТОУ.
При Кр>1 КЧХ разомкнутой системы расширяется относительно КЧХ ТОУ => запас устойчивости уменьшается.
Оптимальное значение Кр такое, при котором КЧХ разомкнутой системы касается окружности с координатами (а,r).
ПИ-регулятор.


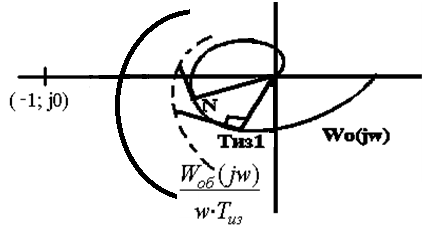
Примечание: Для всех последующих точек КЧХ разомкнутой системы берут те же Тиз, что и для 1-ой точки. При уменьшении Тиз, увеличивается интегральная составляющая в регуляторе, которая проявляет себя в конце переходного процесса, когда пропорциональная составляющая не работает, но при этом уменьшается запас устойчивости по модулю, что приводит к уменьшению пропорциональной составляющей, это ухудшает поведение АСР в начале переходного процесса.
ПИД-регулятор. Расчёт ПИ-регулятора показывает, что введение интегральной составляющей в закон регулирования увеличивает отставание по фазе КЧХ разомкнутой системы и приближает её к точке (-1, j0), тем самым, уменьшая запас устойчивости системы.
Для компенсации отрицательного действия И-регулятора по фазе вводят составляющую, пропорциональную первой производной от отклонения регулируемой величины. Тогда:

Из КЧХ видно, что отрицательная составляющая в мнимой части уменьшается на величину Тпв. При
 -
полная компенсация Тиз.
-
полная компенсация Тиз.
При больших частотах происходит опережение КЧХ разомкнутой системы с ПИД-регулятором системы с ПИ-регулятором. В областях низких частот (<0) сохраняется отставание по фазе, но меньше, чем у ПИ-регулятора. С точки зрения компенсации отставания следует увеличивать скоростную составляющую регулирующего воздействия, но при этом увеличивается модуль КЧХ разомкнутой системы, что может дать обратный эффект, т.е. есть некоторый оптимум, при котором есть наибольший эффект.
Принято оценивать интенсивность воздействий по коэффициенту демпфирования:
 -
коэффициент демпфирования.
-
коэффициент демпфирования.
Для электронных устройств поддерживается на уровне 8, в пневматических устройствах – 7.
Построение годографа ведут по аналогии с ПИ-регулятором:


Один вектор в «+», другой в «-»
Задавшись Тиз и Кр=1. Под перпендикуляром откладываются вектор И составляющей и в обратную сторону вектор Д-составляющей. Проводят под углом γ касательную, строят окружность и вычисляют радиус.
Метод показывает влияние каждой составляющей.
Метод коэффициентов для определения настроек регулятора
Метод используется для быстрой, приближенной оценки значений параметров настройки регулятора для трех видов оптимальных типовых процессов регулирования. Метод применим как для статических объектов с самовыравниванием (см. таблицу), так и для объектов без самовыравнивания.
Таблица.
Регулятор |
Типовой процесс регулирования |
||
апериодический |
с 20% перерегулированием |
|
|
И |
|
|
|
П |
|
|
|
ПИ |
|
(
|
|
ПИД |
|
|
|









 )
)









где
T,  ,
,  -
постоянная времени, запаздывание и
коэффициент усиления объекта. В этих
формулах предполагается, что настраивается
регулятор с передаточной функцией
изодромного типа.
-
постоянная времени, запаздывание и
коэффициент усиления объекта. В этих
формулах предполагается, что настраивается
регулятор с передаточной функцией
изодромного типа.