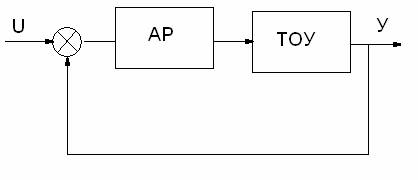
Метод рчх.
В аналитических методах первая часть задачи решается как определение области заданного запаса устойчивости свободного движения замкнутой системы АСР при заданном законе регулирования. Точность решения зависит от точности определения математической модели ТОУ.
Если динамическая модель ТОУ определена в виде передаточной функции ТОУ или комплексной частотной характеристики, то рекомендуется решать задачу оптимизации методом расширенных частотных характеристик - РЧХ.
Если динамические свойства определены экспериментально, то для оптимальности лучше воспользоваться методом незатухающих колебаний (Циглера-Никольса).
Метод расширенных частотных характеристик
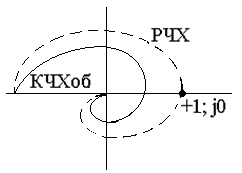
Метод РЧХ позволяет произвести расчёт регулятора и получить оптимальный переходный процесс в АСР, с точки зрения интенсивности затухания переходного процесса. Метод РЧХ базируется на частотном критерии Найквиста. (Если годограф разомкнутой системы проходит через точку (-1; j0), то возникают устойчивые колебания с постоянной амплитудой)
Колебания поддерживают сами себя:


Метод РЧХ: Если разомкнутая АСР имеет степень колебательности не ниже m и её расширенная КЧХ проходит через точку (1, j0), то замкнутая АСР будет обладать заданной степенью устойчивости и заданной интенсивностью затухания переходного процесса (это число m и входит в параметры регулятора).



Известно, что для устойчивости системы необходимо и достаточно иметь корни характеристического уравнения с отрицательной вещественной частью, т.е. чтобы все корни находились на левой полуплоскости. Запас устойчивости определяется ближайшим к мнимой оси корнем.
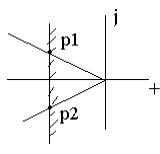
Система будет обладать определенным запасом устойчивости, если все остальные корни лежат левее линии y=α1. Значение этого корня будет определять интенсивность затухания ПП.
Степень колебательности переходного процесса m численно равна абсолютному значению отношения вещественной части корня к мнимой части для наименьшего этого соотношения. Чем ближе к оси, тем хуже устойчивость.
Известно, что свободное движение системы является решением линейного дифференциального уравнения и состоит из n составляющих, каждая из которых соответствует одному корню. Решение представляется в виде суммы экспонент:

Корню
 соответствует составляющая
соответствует составляющая

Предположим,
что
 .
Следовательно:
.
Следовательно:



Если требуется получить заданное качество, то закладывается вполне определенное значение m:
Ψ = 0 0.75 0.9 1
m = 0 0.221 0.366 ~
Примечание 1.
Геометрическая интерпретация этого метода состоит в том, что степень затухания составляющей

определяется как тангенс угла наклона линии, проходящей через начало координат и корень (–mω+jω).
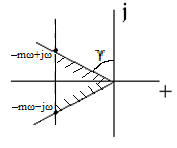
Если корни расположены внутри сектора, то затухание быстрее.
Примечание 2.
Если в решении дифференциального уравнения имеются еще корни, то степень затухания у них будет одинакова, но амплитуда разная.
Расчет ведется для составляющей с наименьшей степенью затухания, т.к. все остальные составляющие будут затухать быстрее.
Комплексные частотные характеристики для различных значений m получили название расширенных КЧХ. Если в РЧХ m принять равной 0, то РЧХ совпадает с нормальной КЧХ. Линия, определяющая заданную степень затухания, совпадает с мнимой осью, т.е. будет расчет системы на границе устойчивости.
Ограничение вида p = -mω = jω позволяет получить совокупность параметров настройки регулятора, обеспечивающую внутри области устойчивости линию равного затухания или заданной степени колебательности.
Для ПИ- регулятора можно построить следующие линии равного затухания:
Если РЧХ проходит через точку (+1, j0), то действительная КЧХ пройдет с некоторым запасом
Коэффициенты можно рассчитать либо аналитическим методом, либо по ПФ. Для расчета параметров настройки методом РЧХ необходимо иметь параметры объекта и регулятора.


Ограничениями мы обеспечиваем не только определение запаса устойчивости в системе, но и определяем интенсивность затухания переходного процесса, определяемую или Ψ, или m, или m=tgγ.
Если в решении системы встретятся корни на линии ограничения, то соответствующие составляющие переходного процесса будут затухать с той же скоростью. Расчёт параметров АР с помощью указанных ограничений позволяет получить линию равного затухания внутри области устойчивости.
Последовательность расчета настроек регулятора методом РЧХ (ПИД регулятор):
Определяем РЧХ ТОУ в зависимости от выбранного значения m (Ψ),частоты (ω), и параметров объекта.

Определение РЧХ выбранного автоматического регулятора, выраженные в зависимости от Ψ, ω, параметров настройки регулятора С0, С1, С2.

3. Исходя из условия прохождения РЧХ системы через точку (+1, j0)

записываем:

и составляем систему уравнений:



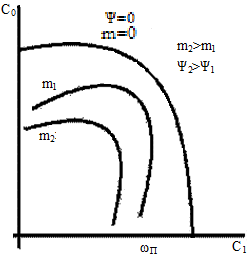
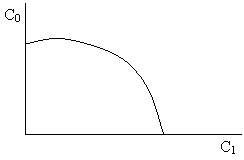
4. Решаем полученную систему уравнения с 2-мя неизвестными С0 и С1 при фиксированном значении С2 и получаем линию равной степени затухания при изменении частоты
5. Повторяем расчет для других значений C2 и получаем семейство линий равного затухания.
6. При движении по линии ψ=const амплитуды будут разные, степень затухания одна и та же.
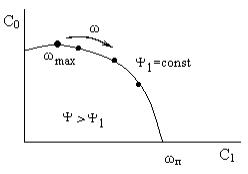
Расчет кривой ведут пока С0 не станет отрицательным. Расчет начинают с С2=0, затем улучшают за счет скоростной составляющей. На некоторой частоте С0 становится равным 0. Регулятор становится пропорциональным, т.е. кусок оси до т.ωп является пропорциональной составляющей. При С1=0, регулятор становится И-регулятором.
Практические рекомендации:
а) В большинстве технологических процессов считается удовлетворительным степень затухания Ψ=0.75…0.9. При Ψ<0.75 – переходный процесс затухает недостаточно интенсивно. При значениях Ψ выше 0,9 обеспечивается хорошее затухание, но возрастает динамическое отклонение, что неприемлемо в некоторых ТП.
б) Если в процессе эксплуатации свойства ТОУ ухудшаются, то расчёт настроек проводим на большую интенсивность затухания (m), чтобы избежать появления слабозатухающих составляющих в переходном процессе в процессе эксплуатации (износ, повреждение контактов).
в) При изменении параметров С0, С1 в сторону больших ω амплитуда колебаний выходной величины будет уменьшаться, но по мере приближения к оси абсцисс (ОХ) ПП затягивается. Экспериментально доказано, что оптимальной парой получаются значения параметров, для частот ωр=1.2ωmax или ωр=0.8ωп. При ухудшении свойств надо сдвигаться внутрь по диагонали.
Лекция 18. Расширенные частотные характеристики ТОУ.
ТОУ без самовыравнивания и транспортного запаздывания.



Наличие
 обеспечивает запас по фазе, так как мы
намеренно приближаем к критической
точке на arctg.
обеспечивает запас по фазе, так как мы
намеренно приближаем к критической
точке на arctg.
ТОУ без самовыравнивания с запаздыванием
Разложим звено запаздывания отдельно:

Первый множитель влияет на амплитуду, второй – поворачивает вектор годографа на величину ωt по часовой стрелке.
ПФ по аналогии будет иметь вид:


Наличие запаздывания ухудшает динамические свойства системы.
Статический ТОУ без транспортного запаздывания.


Статический ТОУ с транспортным запаздыванием.
По аналогии добавляем составляющие от транспортного запаздывания как для астатического объекта: