

Метод площадей
Метод позволяет получить модель по кривой разгона.



Площади F - интегралы:
 ,
,
 ,
,

 ,
,

Метод не применим для немонотонных кривых. Рассмотрим метод для статического объекта без транспортного запаздывания:
1. Разбивают ось времени на части такие, чтобы на двух таких частях значения функции мало отличались от прямой.
2. Значения функции в конце каждой части интервала делят на установившееся значение функции и эти данные в безразмерной форме заносят в таблицу.
3. Определяем площади:


Обычно ограничиваются тремя коэффициентами.
4. Для выбора ПФ используют рекомендации:
При
у(0)=0,

 m=n-l,
при y(0)=0
m=n-l,
при y(0)=0
 m=n-2.
m=n-2.
 ,
,

5. Определив площади, решаем систему уравнений и определяем ai.
Если при расчётах по упрощённым формулам площади - отрицательные, то степень числителя увеличивают на 1.
6. Для получения размерной ПФ умножаем её на коэффициент передачи Ко.
Объект с самовыравниванием и транспортным запаздыванием
Если кривая разгона характеризуется наличием транспортного запаздывания, то построение модели начинают с определения его величины:
1. Определение по кривой разгона запаздывания как время, в течение которого отклонение выхода с момента подачи входа не превышает 0.001 от установившегося значения.(0.1%)
2. Представим модель объекта в виде произведения ПФ:


Объект без самовыравниванием и транспортным запаздыванием
Д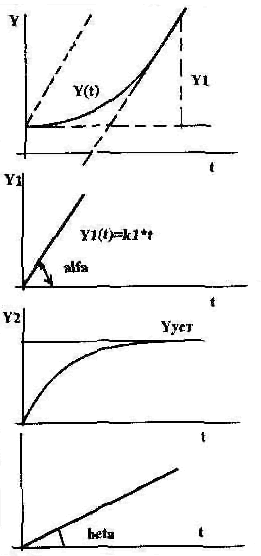 ля
такого объекта характерно, что выход
начинает непрерывно изменяться с момента
приложения входа. При своём неограниченном
изменении выход стремится к своей
ассимптоте.
ля
такого объекта характерно, что выход
начинает непрерывно изменяться с момента
приложения входа. При своём неограниченном
изменении выход стремится к своей
ассимптоте.
1. tgα=k1
2. Строим ассимптоту
3. Вычитаем из Δу1(t) экспериментальную кривую разгона Δy(t) и получаем Δу2(t). ПФ объекта представляем как разность двух ПФ: W01, которая соответствует интегрирующему звену и W02 - звено Δy2(t).
4. Перестроим функцию Δy1(t) в безразмерной форме. Разделим Δy1(t) на Δу2(t). Получаем Wo как для объекта с самовыравниванием без запаздывания.

С запаздыванием

Лекция 16. Методы параметрической оптимизации аср. Определение оптимальных настроек регуляторов.
После определения статических и динамических свойств ТОУ надо перейти ко второму этапу расчёта АСР – расчету настроек регулятора. Прежде чем приступить к расчету настроек, надо сделать выбор типового закона регулирования и выбрать конкретный промышленный регулятор.
Основными показателями при выборе промышленного регулятора являются простота закона регулирования и дешевизна, простота в эксплуатации регулятора, который сможет обеспечить требуемый закон регулирования и качество переходного процесса при имеющихся в ТП возмущениях.
Для выбора и расчета промышленного регулятора нужно знать параметры ТОУ. Иногда установить их нельзя или затруднительно (при проектировании нового ТОУ). Тогда используют следующие рекомендации:
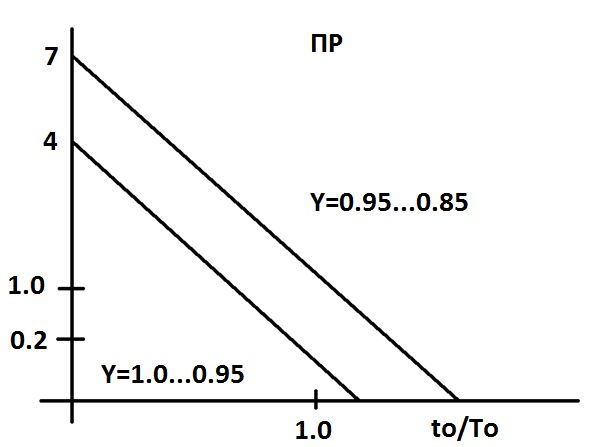
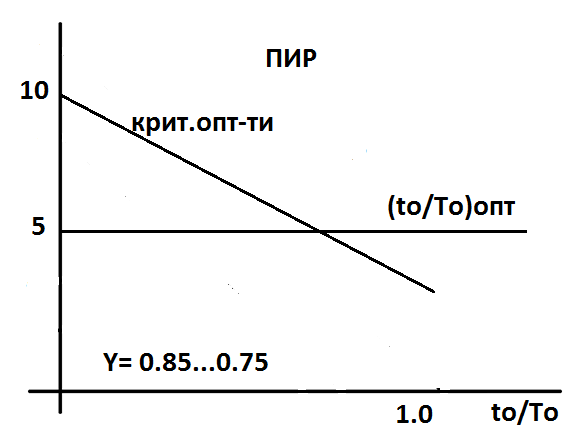
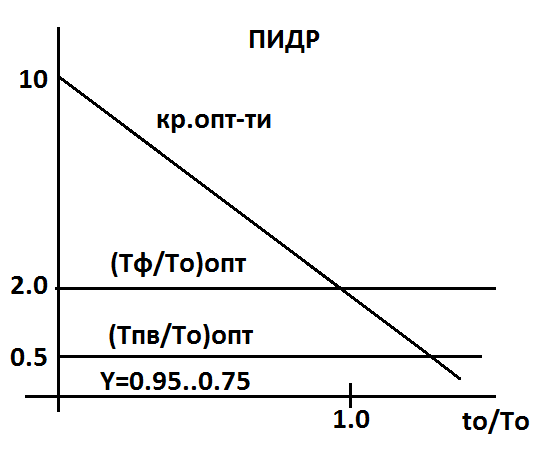
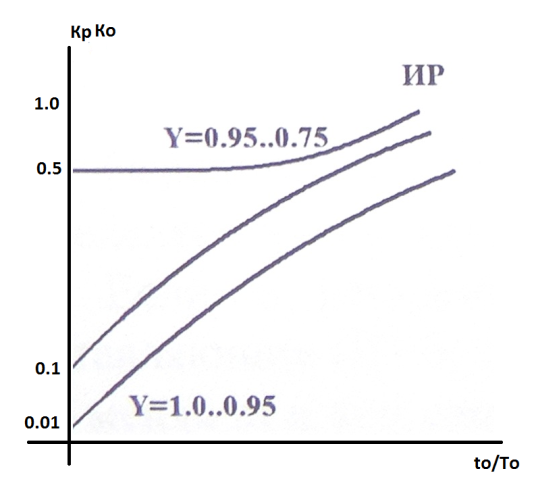
1. Регуляторы релейного типа применяют на ТОУ большой ёмкости и без значительного запаздывания (терморегуляторы, управление микроклиматом, управление насосной станцией и пр.).
2. Пропорциональные регуляторы применяются на ТОУ средней ёмкости с небольшим запаздыванием при плавном изменении нагрузки (обычно в одноёмкостных объектах) (регулирование уровня жидкости в системах кондиционирования, морозильных камер, паровых котлов, регулирование температуры в электротенах и трубопроводах).
3.Интегральные регуляторы применяются в ТОУ с большим самовыравниванием любой ёмкости, с малым запаздыванием и при плавном изменении нагрузки. Регуляторы напряжения.
4. ПИ регуляторы - в ТОУ любой емкости, со значительным запаздыванием, при медленном изменении нагрузки (используется практически повсеместно, в т.ч. в системах вентиляции).
5. ПИД регуляторы - в ТОУ любой емкости, с большим запаздыванием, с резкими и большими изменениями нагрузки (применяется в системах регулирования и управления техпроцессами в энергетике, металлургии, химической, нефтехимической, от локальных систем до централизованных АСУ).
ПД-регуляторы применяют для регулирования объектов, которые допускают наличие статической ошибки регулирования.
6. Импульсные регуляторы - в ТОУ с очень большим запаздыванием.
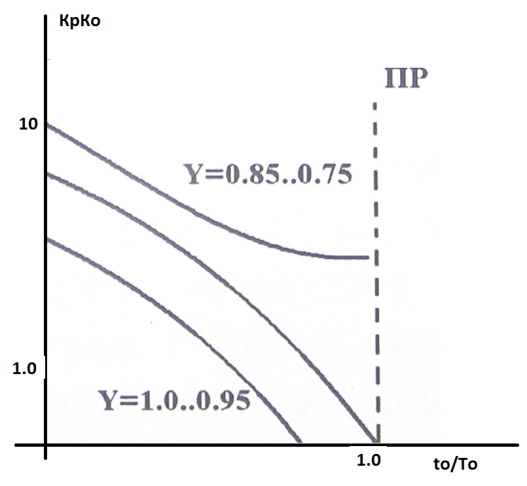
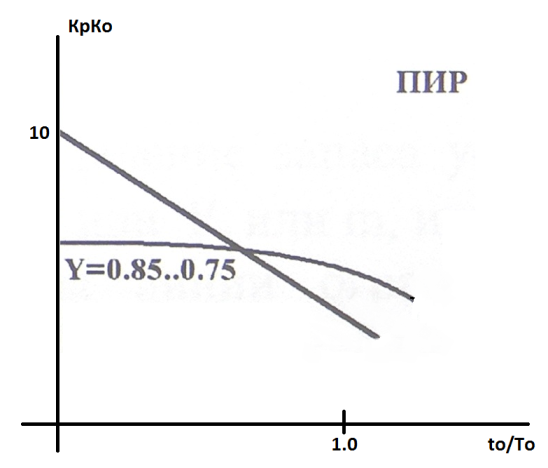
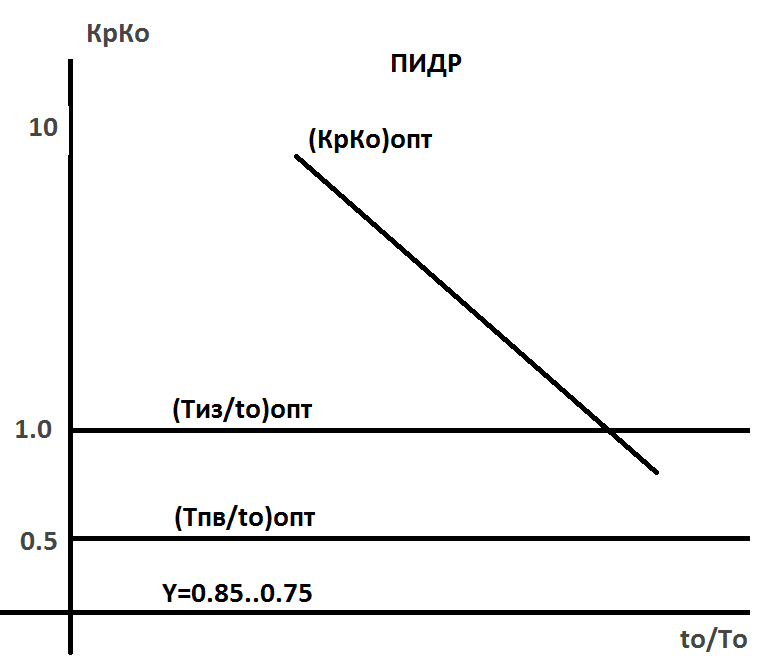
Для объектов с t0>0.5·tи, даже ПИД-регуляторы не могут обеспечить достаточно хорошего качества регулирования
Критерием для применения импульсных регуляторов является отношение
 ,
,
где Т0 — постоянная времени объекта.
Импульсные регуляторы используются для управления тяговыми двигателями электрокаров.
|
|
|
|
|
|
|
|
|

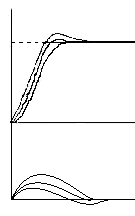
Главная задача: получение устойчивой АСР, так как оптимизировать неустойчивые системы не имеет смысла. Для практического применения АСР одного критерия устойчивости недостаточно. Каждый технологический процесс должен протекать с определёнными количественными показателями качества. Рассмотрим процессы в АСР при различных параметрах настройки ПИ регулятора.
|
|
|
|
1.Процесс №1 дает вполне приемлемое максимальное динамическое отклонение, но затухает медленно и поэтому не может быть признан оптимальным.
2.Процесс №2 носит апериодический характер и высокую скорость затухания, но при этом происходит значительное увеличение максимального динамического отклонения, что может быть не допустимо для многих ТП.
3. Процесс №3 имеет значительно меньшее максимальное значение за счёт получения некоторой величины перерегулирования. Переходный процесс затухает достаточно быстро, при этом макс. отклонение допустимо для многих ТП.
4.Процесс №4 характеризуется небольшим максимумом, не имеет перерегулирования, но переходный процесс затянут.
5.Процесс №5 Может быть признан удовлетворительным, но видно, что ПИ-регулятор превращается в П-регулятор и есть статическая ошибка. Этот процесс не может считаться оптимальным.
Можно сформулировать следующие требования:
а) интенсивность затухания переходного процесса наибольшая
б) максимальное динамическое отклонение должно быть как можно меньше. Должно быть допустимым, с точки зрения ТП.
в) продолжительность переходного процесса минимальная.
Для ПИ регулятора требования взаимопротиворечивые. С уменьшением времени ПП, увеличивается максимальное отклонение Ymax
Выбор критерия оптимальности - самая сложная задача проектировщиков. Задача не всегда может быть формализована. В теоретических расчётах критерий оптимальности часто связывают с обобщенными показателями:
-интегральной оценкой качества;
-дисперсией;
-энтропией ошибки регулирования.
Между качеством ПП и обобщенными показателями существует взаимосвязь.
Преимущество: результаты расчёта с применением таких критериев могут быть распространены на большое количество ТОУ (на всю серию промышленных ТОУ, использующих данные ТСА). Данные для расчёта обобщённых показателей берут из математических моделей.
На практике широко используют методы минимизации интегральных оценок качества регулирования вдоль границы параметров настройки регуляторов, допустимых с точки зрения заданного запаса устойчивости.
При экспериментальных исследованиях, при наличии случайных возмущений, возникает необходимость применять статистический критерий оптимальности. При этом необходимо знать законы распределения случайных величин
 ,
,
где х - ожидаемое значение, у - действительное значение. Минимизируем среднее значение отклонения между х и у. Если закон распределения случайных величин х и у не известен, то задача оптимизации решается только для некоторых видов функции f(x,y).
Если х и у подчиняются нормальному закону распределения, то чаще всего минимизирует квадрат разности:
 .
.
Этот метод получил наибольшее распространение при оптимизации промышленных АСР, т.к. при нормальном распределении система, спроектированная по этому критерию, является оптимальной, с точки зрения минимума энергетических и материальных затрат, получения максимального КПД, имеет экономическое и техническое обоснование для многих промышленных ТОУ, в которых регулируется давление, температура. Кроме того, будет оптимальной и с точки зрения многих других критериев. Этот критерий I2 является простейшим с математической точки зрения.
Может применяться и информационный метод минимизации ошибки. Минимизация проводится в 2 этапа. Применение двухэтапной оптимизации приводит к тому, что расчёт ведётся на наихудшие режимы работы.
В общем виде рекомендации по параметрической оптимизации выглядят так:
1.Параметры настройки регулятора выбираются так, чтобы в замкнутой АСР имелся достаточный запас устойчивости.
2.Выбранный показатель качества регулирования должен быть не хуже заданного.
В инженерных расчетах промышленных АСР обычно преследуют цель получить ПП вполне определенного вида и соответственно применяют несколько методов определения оптимальных настроек регуляторов.
ПП оценивают по следующим показателям качества:
-устойчивость;
-максимальное значение;
-отклонение от установившегося значения;
-перерегулирование;
-степень затухания;
-время регулирования;
-статическая ошибка.
Выделяют следующие 4 типовых ПП для замкнутых АСР:
1) граничный апериодический переходный процесс;
Любое дальнейшее увеличение входного сигнала приводит к появлению перерегулирования.
2) переходный процесс с 20% перерегулированием; σ = 20%
3) переходный процесс с минимумом квадратичной ошибки:

(До 5-ти колебаний)
4) переходный
процесс с заданной степенью затухания.

В инженерных методах расчета на такие типовые процессы используют приближенную модель ТОУ в виде последовательного соединения апериодического звена первого порядка (или интегрального астатического) и звена чистого запаздывания.
 ,
,
Переходное запаздывание учитывается в чистом запаздывании. Сознательно ухудшают свойства объекта с учетом дальнейшего старения оборудования
Для этой модели имеется таблица инженерных формул.
В формулах ВТИ для приближённого расчёта оптимального параметра настроек регуляторов в качестве критерия используется степень затухания Ψ= 0.75 и интегральная оценка качества.
Параметр настройки |
П-регулятор |
ПИ-регулятор |
ПИД-регулятор |
Характеристика ТОУ |
|
- |
|
|
|
|
- |
|
|
|
|
2Ко
|
2Ко
|
1.7Ко
|
|















 - скорость разгона.
- скорость разгона.
Для этих же моделей разработаны номограммы для определения оптимальных настроек регуляторов. Приводятся для статических и астатических объектов, для стандартных законов регулирования, для степеней затухания 0,75; 0.85; 0.9; 0.95; 1.
Астатический объект
Статический объект
Лекция 17. Аналитические методы параметрической оптимизации АСР.