

Б илет – 22 «центр тяжести. Общие формулы для определения центра тяжести однородных тел».
ЦЕНТР ТЯЖЕСТИ – неизменно связанная с данным телом точка, через которую проходит линия действия равнодействующей сил тяжести, действующих на частицы данного тела, при любом положении тела в пространстве.
ЦЕНТРЫ ТЯЖЕСТИ ОДНОРОДНЫХ ТЕЛ:
ЦЕНТРА
ТЯЖЕСТИ ДУГИ ОКРУЖНОСТИ – Рассмотрим
дугу ![]() радиуса R
с центральным углом АОВ = 2α. В силу
симметрии центр тяжести этой дуги лежит
на оси ОХ
(рис.109).
радиуса R
с центральным углом АОВ = 2α. В силу
симметрии центр тяжести этой дуги лежит
на оси ОХ
(рис.109).
Найдем координату ХС по формулам:
![]()
![]()
![]() (1)
(1)
Для
этого выделим на дуге
элемент ММ’ длиной d![]() = R
dϕ,
положение которого определяется углом
ϕ. Координата х элемента ММ' будет х = R
cosϕ.
Подставляя эти значения х и d
в первую из формулы (1)
и
имея в виду, что интеграл должен быть
распространен на всю длину дуги, получим:
= R
dϕ,
положение которого определяется углом
ϕ. Координата х элемента ММ' будет х = R
cosϕ.
Подставляя эти значения х и d
в первую из формулы (1)
и
имея в виду, что интеграл должен быть
распространен на всю длину дуги, получим:
![]() (2)
(2)
Где L – длина дуги , равная R*2α. Отсюда окончательно находим, что центр тяжести дуги окружности лежит на ее оси симметрии на расстоянии от центра О, равном
ХС = (Rsinα)/α (3)
Где угол α измеряется в радианах.
Ц
 ЕНТР
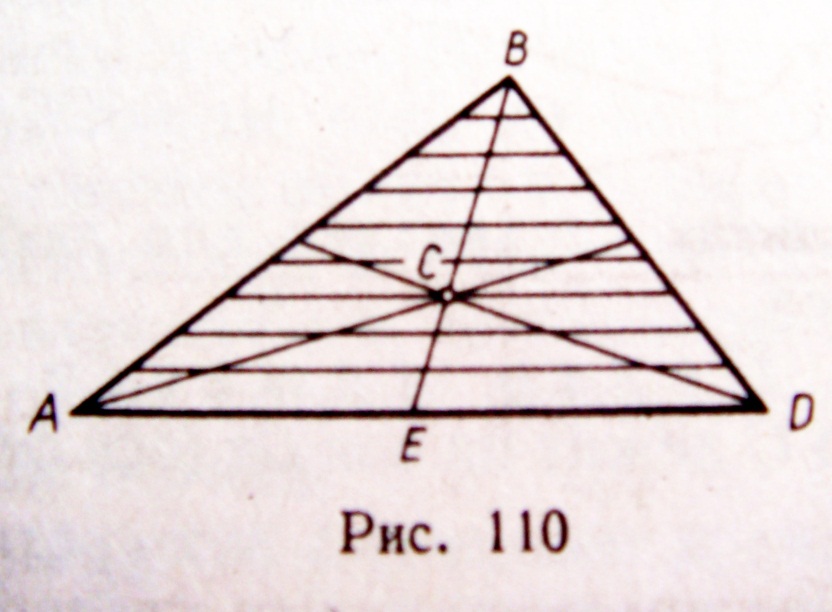
ТЯЖЕСТИ ПЛОЩАДИ ТРЕУГОЛЬНИКА – Разобьём
площадь треугольника ABD
(рис.110)прямыми, параллельными стороне
AD,
на n
узких полосок; центры тяжести этих
полосок будут лежать на медиане ВЕ
треугольника. Следовательно, и центр
тяжести всего треугольника лежит на
этой медиане. Аналогичный результат
получается для двух других медиан.
Отсюда заключаем, что центр тяжести
площади треугольника лежит в точке
пересечения его медиан. При этом, как
известно,
ЕНТР
ТЯЖЕСТИ ПЛОЩАДИ ТРЕУГОЛЬНИКА – Разобьём
площадь треугольника ABD
(рис.110)прямыми, параллельными стороне
AD,
на n
узких полосок; центры тяжести этих
полосок будут лежать на медиане ВЕ
треугольника. Следовательно, и центр
тяжести всего треугольника лежит на
этой медиане. Аналогичный результат
получается для двух других медиан.
Отсюда заключаем, что центр тяжести
площади треугольника лежит в точке
пересечения его медиан. При этом, как
известно,
СЕ = ВЕ/3. (4)
Ц
 ЕНТР
ТЯЖЕСТИ ПЛОЩАДИ КРУГОВОГО СЕКТОРА –
Рассмотрим
круговой сектор OAВ
радиуса R
с центральным углом 2α (РИС.111). Разобьём
мысленно площадь сектора ОАВ радиусами,
проведенными из центра О, на n
секторов. В пределе, при неограниченном
увеличении числа n,
эти секторы можно рассматривать как
плоские треугольники, центры тяжести
которых лежат на дуге DE
радиуса 2R/3.
Следовательно, центр тяжести секторов
ОАВ совпадает с центром тяжести дуги
DE,
положение которого найдется по формуле
(3).
Окончательно получим, что центр тяжести
площади кругового сектора лежит на его
оси симметрии на расстоянии от центра
О, равном
ЕНТР
ТЯЖЕСТИ ПЛОЩАДИ КРУГОВОГО СЕКТОРА –
Рассмотрим
круговой сектор OAВ
радиуса R
с центральным углом 2α (РИС.111). Разобьём
мысленно площадь сектора ОАВ радиусами,
проведенными из центра О, на n
секторов. В пределе, при неограниченном
увеличении числа n,
эти секторы можно рассматривать как
плоские треугольники, центры тяжести
которых лежат на дуге DE
радиуса 2R/3.
Следовательно, центр тяжести секторов
ОАВ совпадает с центром тяжести дуги
DE,
положение которого найдется по формуле
(3).
Окончательно получим, что центр тяжести
площади кругового сектора лежит на его
оси симметрии на расстоянии от центра
О, равном
![]() (5)
(5)
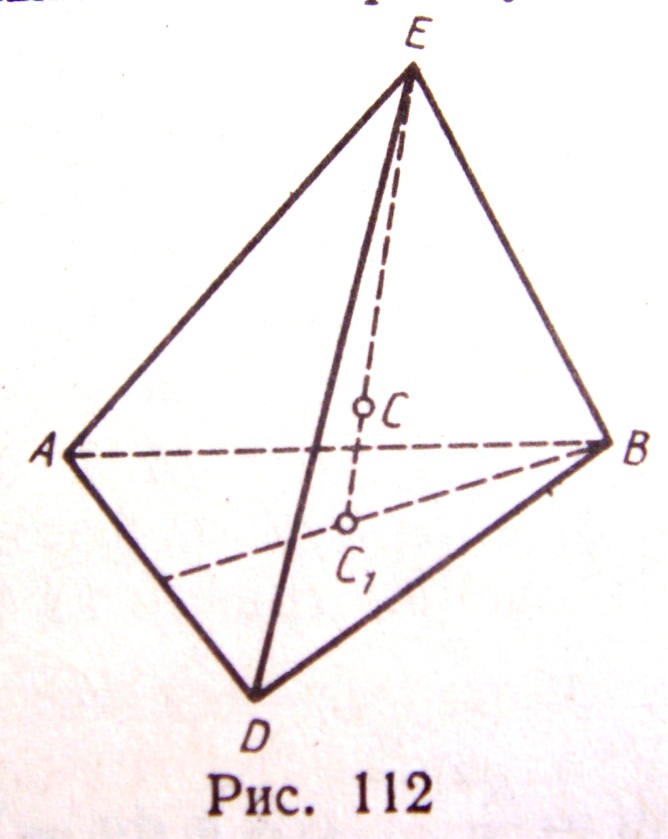
ЦЕНТР ТЯЖЕСТИ ОБЪЁМА ПИРАМИДЫ ( ИЛИ КОНУСА) – Этот центр С лежит на прямой С1Е (рис.112), где Е – вершина, а С1 – центр тяжести площади основания пирамиды; при этом:
СС1 = ЕС1/4 Результат справедлив для любой многоугольной пирамиды и для конуса.
Ц
 ЕНТР
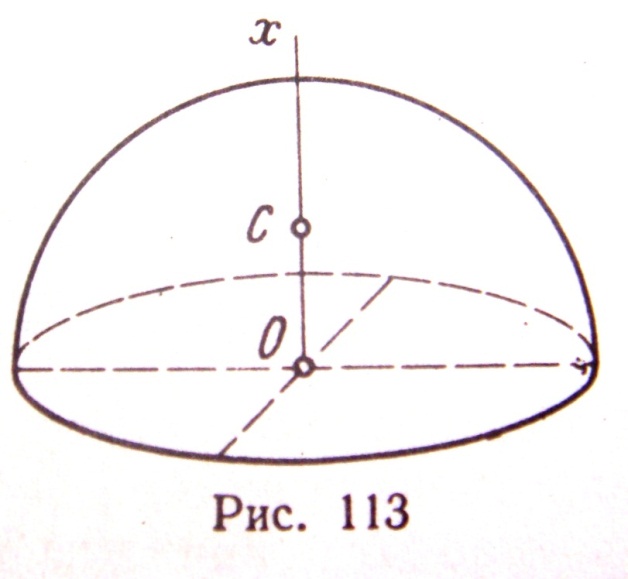
ТЯЖЕСТИ ОБЪЁМА ПОЛУШАРА – Этот
центр С лежит на оси ОХ
(оси симметрии, рис.113), а его координата
ЕНТР
ТЯЖЕСТИ ОБЪЁМА ПОЛУШАРА – Этот
центр С лежит на оси ОХ
(оси симметрии, рис.113), а его координата
ХС = ОС =3R/8 (7)
Где R – радиус полушара.
Билет – 23 «способы определения центра тяжести»
ЦЕНТР ТЯЖЕСТИ – неизменно связанная с данным телом точка, через которую проходит линия действия равнодействующей сил тяжести, действующих на частицы данного тела, при любом положении тела в пространстве.
СИММЕТРИЯ
– Если
однородное тело имеет плоскость, ось
или центр симметрии, то его центр тяжести
лежит соответственно или в плоскости
симметрии, или на оси симметрии, или в
центре симметрии. Допустим, например,
что однородное тело имеет плоскость
симметрии. Тогда этой плоскостью оно
разбивается на две такие части, веса
которых р1
и р2,
равны друг другу, а центры тяжести
находятся на одинаковых расстояниях
от плоскости симметрии. Следовательно,
центр тяжести тела как точка, через
которую проходит равнодействующая двух
равных и параллельных сил ![]() и
и ![]() ,
будет действительно лежать в плоскости
симметрии. Из свойств симметрии следует,
что центр тяжести, однородного круглого
кольца, круглой или прямоугольной
пластины, прямоугольного параллелипипида,
шара и других однородных тел, имеющих
центр симметрии, лежит в геометрическом
центре (центре симметрии) этих тел.
,
будет действительно лежать в плоскости
симметрии. Из свойств симметрии следует,
что центр тяжести, однородного круглого
кольца, круглой или прямоугольной
пластины, прямоугольного параллелипипида,
шара и других однородных тел, имеющих
центр симметрии, лежит в геометрическом
центре (центре симметрии) этих тел.
Р АЗБИЕНИЕ
– Если
тело можно разбить на конечное число
таких частей, для каждой из которых
положение центра тяжести известно, то
координаты центра тяжести всего тела
можно непосредственно вычислить по
формулам:
АЗБИЕНИЕ
– Если
тело можно разбить на конечное число
таких частей, для каждой из которых
положение центра тяжести известно, то
координаты центра тяжести всего тела
можно непосредственно вычислить по
формулам:
![]()
![]() (1)
(1)
![]()

![]()
![]() (2)
(2) ![]()
![]()
![]() (3)
(3)

![]()
![]() (4)
(4)
![]()
При этом, число слагаемых в каждой из сумм будет равно числу частей, на которые разбито тело.
ДОПОЛНЕНИЕ – Этот способ является частным случаем способа разбиения. Он применяется к телам, имеющим вырезы, если центры тяжести тела без выреза и вырезанной части известны.
И НТЕГРИРОВАНИЕ
–
Если тело нельзя разбить на несколько
конечных частей, положения центров
тяжести которых известны, то тело
разбивают сначала на произвольные малые
объёмы
НТЕГРИРОВАНИЕ
–
Если тело нельзя разбить на несколько
конечных частей, положения центров
тяжести которых известны, то тело
разбивают сначала на произвольные малые
объёмы ![]() ,
для которых формулы:
,
для которых формулы:
![]() (5)
(5)
![]()
принимают вид:
![]() И Т.Д. , (6)
И Т.Д. , (6)
Г де
де
![]() – координаты некоторой точки, лежащей
внутри объёма
.
Затем в равенствах
– координаты некоторой точки, лежащей
внутри объёма
.
Затем в равенствах ![]() и
т.д. переходят к пределу, устремляя все
к нулю, т.е. стягивая эти объёмы в точки.
Тогда стоящие в равенствах суммы
обращаются в интегралы, распространённые
на весь объём тела, и формулы (6)
дают в пределе:
и
т.д. переходят к пределу, устремляя все
к нулю, т.е. стягивая эти объёмы в точки.
Тогда стоящие в равенствах суммы
обращаются в интегралы, распространённые
на весь объём тела, и формулы (6)
дают в пределе:

![]()
![]() (7)
(7)
Аналогично для координат центров тяжести площадей и линий получаем в пределе из формул (3) и (4):
![]()
![]() (8)
(8)
(9)
ЭКСПЕРИМЕНТАЛЬНЫЙ СПОСОБ – Центры тяжести неоднородных тел сложной конфигурации (самолётов, паровозов и т.д.) можно определять экспериментально. Один из возможных экспериментальных методов (метод подвешивания) состоит в том, что тело подвешивают на нити или тросе за различные его точки. Направление нити, на которой подвешено тело, будет каждый раз давать направление силы тяжести. Точка пересечения этих направлений определяет центр тяжести тела.
БИЛЕТ-24
Динамический винт
ДИНАМИЧЕСКИЙ
ВИНТ -
совокупность действующих на твёрдое
тело силы ![]() и
пары сил
с моментом
и
пары сил
с моментом ![]() ,
лежащей в плоскости, перпендикулярной
к силе
,
лежащей в плоскости, перпендикулярной
к силе ![]() (векторы
(векторы ![]() и
и ![]() параллельны).
К Д. в. приводится в наиб. общем случае
произвольная система действующих на
твёрдое тело сил. Дальнейшее упрощение
Д. в. невозможно, т. е. его нельзя заменить
только одной силой (равнодействующей)
или одной парой сил. Можно лишь, сложив
силу
параллельны).
К Д. в. приводится в наиб. общем случае
произвольная система действующих на
твёрдое тело сил. Дальнейшее упрощение
Д. в. невозможно, т. е. его нельзя заменить
только одной силой (равнодействующей)
или одной парой сил. Можно лишь, сложив
силу ![]() с
одной из сил пары, привести Д. в. к двум
скрещивающимся силам.
с
одной из сил пары, привести Д. в. к двум
скрещивающимся силам.
В общем случае для произвольной системы сил главный вектор и главный момент составляют между собой некоторый угол. Главный момент MO разложим на две составляющие, одну из них мы обозначим MO' и направим по главному вектору, а вторую - MO'' - направим перпендикулярно первой (рис. 27, a).
Вторую составляющую представим в виде пары, одной из сил которой уравновесим главный вектор (рис. 27, b). Таким образом, мы привели систему сил к одной силе (по величине и направлению равной главному вектору) и к одной перпендикулярной ей паре с моментом MO', параллельным силе, равным по величине проекции главного момента на главный вектор (рис. 27, c и d). Такую совокупность силы и пары сил называют динамическим винтом, а линию действия AL силы в динамическом винте называют центральной осью системы сил.
БИЛЕТ-25