

Лабораторна робота № 2 Дослідження перехідних процесів приводу з асинхронним електродвигуном
Мета роботи: визначити перехідні характеристики електродвигуна приводу верстата при його пуску та реверсі
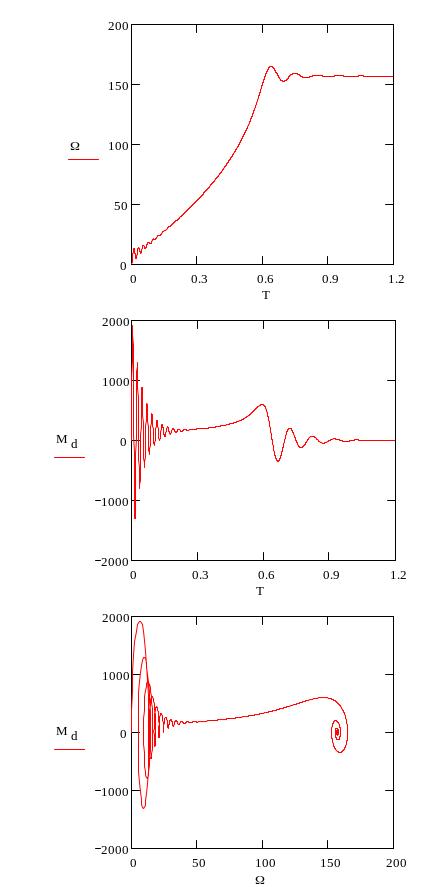
Процеси пуску та реверсу електродвигуна супроводжуються інтенсивними коливаннями рушійного моменту, пікові значення якого можуть в декілька разів перевищувати значення номінального моменту. З цим явищем необхідно рахуватися при проектуванні механізмів, що приводяться від асинхронного електродвигуна, зокрема, для коробок швидкостей. Значення рушійного моменту необхідно враховувати при розрахунку механізму на міцність та довговічність.
Рівняння моделі:
![]() ;
;
![]() ;
;
![]() ,
,
де - кутова швидкість ротору; о – кутова частота мережі живлення; Мд – рушійний момент; Мс – момент сил опору; Мк – критичний момент; - допоміжна змінна, що має розмір моменту; Те – електромагнітні постійна часу; J – момент інерції ротору; р – число пар полюсів.
Вихідні дані електродвигуна повинні включати в себе: тип; номінальну потужність Рн; синхронну no та номінальну nн частоти обертання; маховий момент ротору; кругову частоту мережі живлення; відношення максимального моменту до номінального .
В лабораторній роботі прийняти: Те = 0,04 0,06 с; о = 314 с-1; Мс = 0; критичний момент дорівнює максимально допустимому моменту двигуна; момент інерції ротору дорівнює маховому моменту ротору. Введемо допоміжні змінні: Х0 = ; Х1 = Мд; Х2 = . Рекомендовані параметри інтегрування: число точок l = 2000; тривалість процесу і = 3 с.
Складаємо вектор
початкових умов:
![]() ,
,
при пуску = 0; Мд = 0; = 2Мк.
при реверсі = о; Мд = 2Мк; = 2Мк.
Вектор правих частин рівнянь математичної моделі:
Процедура чисельного
інтегрування відбувається методом
Рунге – Кутта 4-го порядку:
![]() ,
де Z – матриця допоміжних
змінних.
,
де Z – матриця допоміжних
змінних.
Приклад побудови пускових характеристик в системі Mathcad:

Завдання на лабораторну роботу
1. Скласти в системі Mathcad модель приводу з асинхронним електродвигуном згідно з варіантами табл. 2.1.
Таблиця 2.1
№ вар. |
Модель |
Номін. потужн., кВт |
Синхр. частота, хв-1 |
Номін. частота, хв-1 |
Коеф. макс. моменту |
Маховий. момент ротору, Нм2 |
1 |
4АН355M12УЗ |
110 |
490 |
500 |
1,8 |
110 |
2 |
4АН355S10УЗ |
110 |
590 |
600 |
1,8 |
96,8 |
3 |
4АН315M8УЗ |
132 |
735 |
750 |
1,9 |
70 |
4 |
4АН315S6УЗ |
132 |
985 |
1000 |
2,0 |
44,5 |
5 |
4АН280M4УЗ |
160 |
1470 |
1500 |
2,0 |
21,3 |
6 |
4АН250M2УЗ |
132 |
2945 |
3000 |
2,2 |
4,95 |
7 |
4АН315S12УЗ |
55 |
490 |
500 |
1,8 |
56,3 |
8 |
4АН280M10УЗ |
55 |
585 |
600 |
1,8 |
37,5 |
9 |
4АН200M8УЗ |
22 |
730 |
750 |
2,0 |
4,9 |
10 |
4АН200L6УЗ |
37 |
980 |
1000 |
2,1 |
4,3 |
11 |
4АН200M4УЗ |
45 |
1475 |
1500 |
2,5 |
3,45 |
12 |
4АН200L2УЗ |
75 |
2940 |
3000 |
2,5 |
1,9 |
13 |
4АН355S12УЗ |
90 |
490 |
500 |
1,8 |
96,8 |
14 |
4АН315S10УЗ |
75 |
590 |
600 |
1,8 |
56,3 |
15 |
4АН280S8УЗ |
75 |
735 |
750 |
1,9 |
30 |
16 |
4АН250S6УЗ |
55 |
985 |
1000 |
2,0 |
10,9 |
17 |
4АН200L4УЗ |
55 |
1475 |
1500 |
2,5 |
4,23 |
18 |
4АН180S2УЗ |
37 |
2945 |
3000 |
2,2 |
0,8 |
19 |
4АН315M12УЗ |
75 |
490 |
500 |
1,8 |
66,3 |
20 |
4АН315M10УЗ |
90 |
590 |
600 |
1,8 |
66,3 |
21 |
4АН250S8УЗ |
45 |
740 |
750 |
1,9 |
11,9 |
22 |
4АН280S6УЗ |
90 |
980 |
1000 |
2,0 |
25 |
23 |
4АН280S4УЗ |
132 |
1470 |
1500 |
2,0 |
18,3 |
24 |
4АН315M2УЗ |
250 |
2970 |
3000 |
2,1 |
17 |
25 |
4АН355M10УЗ |
132 |
590 |
600 |
1,8 |
110 |
26 |
4АН355S8УЗ |
160 |
740 |
750 |
1,9 |
97,5 |
27 |
4АН355M6УЗ |
250 |
985 |
1000 |
2,0 |
95 |
28 |
4АН355S4УЗ |
315 |
1485 |
1500 |
2,0 |
57,5 |
29 |
4АН355M2УЗ |
400 |
2970 |
3000 |
2,1 |
28,5 |
30 |
4АН160S2УЗ |
22 |
2915 |
3000 |
2,2 |
0,425 |
Побудувати графіки перехідних процесів в приводі.
Пояснити одержані залежності.