

А6. Динамические преобразования инт (33) – Интегрирование
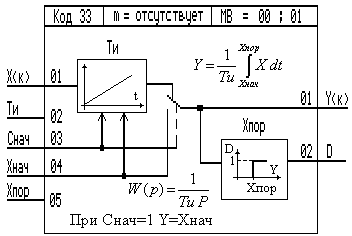
Рисунок 21
Х – интегрируемая величина, Ти – временя интегрирования,
Снач – команда установки начального значения на выходе интегратора, Хнач – начальное значение,
Хпор – пороговое значение. Если выходное значение интегратора будет более Хпор, то на дискретном выходе алгоритма установится логическая единица.
ДИФ (34) – Дифференцирование

Рисунок 22
Алгоритм применяется в схемах динамической коррекции для получения сигналов, связанных со скоростью изменения параметра.
Алгоритм представляет собой реальное дифференцирующее звено с регулируемым коэффициентом усиления и постоянной времени дифференцирования. Км - масштабный коэффициент (коэффициент усиления); Тд - постоянная времени дифференцирования.
Если на вход С0 подается команда обнуления Со=1, то выходной сигнал Y=0 независимо от входного сигнала.
Алгоритм не имеет каскадных входов и выходов и блокирует процедуру обратного счета.
Фил (35) – Фильтрация

Рисунок 23
Алгоритм используется для фильтрации высокочастотных помех, а также для динамической коррекции. Фильтр, имеющий порядок выше первого, можно получить путем последовательного включения нескольких алгоритмов ФИЛ.
Тф – постоянная времени фильтра.
Алгоритм не инициализирует обратный счет, но если по инициативе других алгоритмов на каскадный вход Y поступает команда отключения со значением начальных условий Y0 или команда запрета, эти сигналы через каскадный вход X транслируются предвключенному алгоритму. Ячейка фильтра при отключении заряжается до значения Y0, а на команду запрета эта ячейка не реагирует.
Дин (36) ‑ Динамическое преобразование
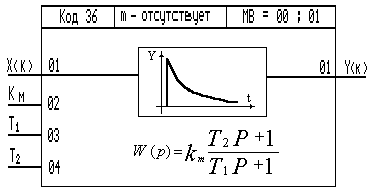
Рисунок 24
Алгоритм применяется для динамической коррекции систем управления в тех случаях, когда требуется интегрально-дифференциальное преобразование сигнала. Км- коэффициент усиления; Т1 и Т2 - постоянные времени.
Диб (37) ‑ Динамическая балансировка

Рисунок 25
Алгоритм применяется для динамической балансировки отключенной цепи. Балансировка обеспечивает безударное включение цепи выработкой балансирующего сигнала, который после включения плавно уменьшается до нуля.
Огс (38) – Ограничение скорости
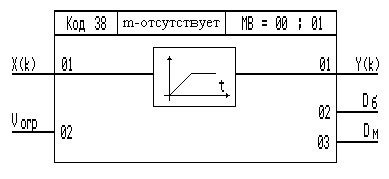
Рисунок 26
Vогр - заданное значение ограничения скорости. Dб - изменение с максимальной скоростью в направлении "больше". Dм - изменение с максимальной скоростью в направлении "меньше".
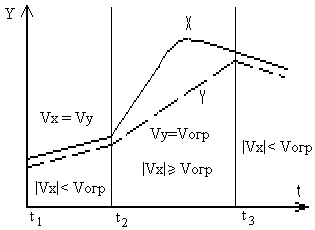
Рисунок 27
Алгоритм используется в тех случаях, когда необходимо ограничить скорость изменения сигнала.
В любой момент времени выходной сигнал Y стремится сравняться с входным сигналом Х. Если Y=Х и скорость изменения входного сигнала Vх меньше заданного ограничения скорости Vогр (т.е. Vх <= -Vогр, то Dм=1), то выходной сигнал Y изменяется со скоростью Vy=Vx, оставаясь в каждый момент времени равным сигналу Х. Если Vх > V огр, то Dб=1 и сигнал Y начинает изменяться со скоростью Vогр до тех пор, пока не сравняется с сигналом Х.
Алгоритм имеет два дискретных выхода Dб и Dм. Если скорость Vy меньше заданного ограничения Vогр, сигналы на обоих выходах равны нулю. В противном случае появляется сигнал на выходе Dб или Dм в зависимости от того, увеличивается (изменяется в направлении "больше") или уменьшается (изменяется в направлении "меньше") выходной сигнал Y Алгоритм не инициирует обратный счет, но если по инициативе других алгоритмов на каскадный выход Y поступает команда отключения со значением начальных условий Y0, внутренняя ячейка отслеживает этот сигнал, так что при включении алгоритма начальное значение сигнала на выходе Y равно Y0.
Алгоритм реагирует на сигнал запрета, запрещения изменения выходного сигнала в направлении увеличения или уменьшения (в зависимости от вида запрета).
Команды отключения и запрета, а также значение начальных условий Y0, транслируются через каскадный вход Х предвключенному алгоритму.