

Вд (11) - Ввод дискретный
Алгоритм применяется для связи функциональных алгоритмов с аппаратными средствами дискретного ввода ( ДЦП). Модуль дискретного ввода устанавливают, как и другие модули УСО, в соответствующий слот контроллера или блока расширения УСО – БУСО. Номер опрашиваемого слота (группы) указывается модификатором типа МТ. Значения МТ зависят от типа УСО и типа контроллера. МТ изменяется в тех же пределах, что и для алгоритма ВА. В остальном, с точки зрения программиста, алгоритм полностью идентичен алгоритму Р-130 ВДА (Б).
Каждый алгоритм обслуживает до 16 дискретных входов. Число обслуживаемых входов m устанавливается модификатором размера МР.
Описание алгоритма. Отличия алгоритма ВД от ВДА (Б).
Алгоритм содержит дискриминаторы длительности импульсов ДИ для фильтрации входных сигналов. ДИ не пропускают на выходы алгоритма импульсы с длительностью дискретных значений tT, установленной на входе Т алгоритма. Длительность дискретного значения сигнала задается в секундах и не зависит от масштаба времени контроллера. Это фактически защита от "дребезга".
Модификатор размера МР=00-16, модификатор типа МТ=01-06 или МТ=01-19. Масштаб времени отсутствует.
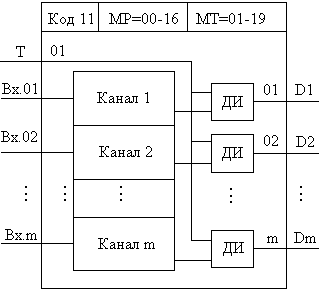
Рисунок 92
Вап(12) - Ввод аналоговый помехозащищенный
Алгоритм применяется для связи функциональных алгоритмов с аппаратными средствами аналогового ввода ( АЦП). Номер слота контроллера, куда установлен модуль аналогового ввода, указывается модификатором типа МТ. Алгоритм имеет защиту от случайных выбросов по аналоговым входам. В остальном алгоритм совпадает с алгоритмом ВА.
Каждый алгоритм обслуживает до 8 аналоговых входов. Число обслуживаемых входов m устанавливается модификатором размера МР.
Помимо связи с АЦП, алгоритм ВАП позволяет корректировать диапазон входного аналогового сигнала в двух точках, калибруя его по выбранной шкале (процентов, технических единиц и т.п.), а также фильтровать сигнал.
Описание алгоритма. Алгоритм содержит несколько идентичных, независимых каналов, число которых задается значением МР.
Каждый канал связан с соответствующим (по номеру) аналоговым входом контроллера. Эта связь образуется "автоматически", как только алгоритм ВА вводится в один из алгоблоков контроллера. К входному аналоговому сигналу добавляется сигнал смещения Хсм и полученная сумма умножается на коэффициент Км. Эти операции позволяют компенсировать смещение нуля и диапазона как АЦП, так и датчика, подключенного к контроллеру, а также выбрать необходимую шкалу параметра.
Выходной сигнал канала равен: Yi=(Xан.вх,i + Хсм,i) *Км,i,
где Хан.вх,i - аналоговый входной сигнал, поступающий от АЦП на i-й канал.
Время обслуживания одного канала аналогового ввода равно 40 мс. Время обновления аналоговых сигналов на выходе алгоритма равно 0,04*m (с); однако это время при любом m не может быть меньше времени цикла, с которым работает контроллер.
После коррекции осуществляется фильтрация сигнала следующим образом.
В каждом i-ом цикле ввода сигнала определяется величина его изменения Хi и скорость его изменения Vi:
Хi=(Xi-Xi-1);
где Хi - значение входного сигнала в текущем цикле;
Хi-1 - значение входного сигнала в предыдущем цикле.
1. Если величина изменения входного сигнала не больше заданной Х, т.е. |Хi|Х, то входной сигнал передается на выход без изменения, то есть Yi=Xi, и запоминаются значения Хi-1=Хi и Xi‑1=Xi; при этом Di=0, Ni=0.
2. Если в каком-либо цикле ввода обнаружено, что |Хi|Х, то предполагается возможность помехи и выходной сигнал начинает формироваться как интерполяция предыдущего значения предыдущей скоростью, т.е. Yi=Yi-1+Хi-1. При этом запускается измерение длительности Тп этой ситуации. Выходной сигнал в каждом цикле ввода рассчитывается как Yi=Yi-1+Хi-1 до тех пор, пока одновременно выполняются отношения |Хi|Х и Тп Т. В противном случае, при |Хi|Х или ТпТ выходной сигнал Y начинает опять отслеживать входной сигнал, то есть, Yi=Xi и Xi‑1=Xi; при этом Di=1 в случае, если Тп Т.
Таким образом, изменение входного сигнала со скоростью, большей допустимой, рассматривается алгоритмом как помеха, которая “вырезается” из входного сигнала путем интерполяции его значения прежней скоростью, если длительность этого изменения меньше заданного Т, что фиксируется значением Di=1. Если длительность такого изменения сигнала больше заданного Т, то это изменение рассматривается алгоритмом как естественное и передается на выход алгоритма с задержкой времени Т. В штатном варианте алгоритма величина Х=1 %, величина Т=0.32 сек. Сигнал D является сборкой сигналов Di.
Выходы Ni являются тестовыми выходами алгоритма, фиксирующим следующие ситуации.
-
Значение Ni
Причина
0
0.5%Yi100%
1
Yi <0.5% (возможен обрыв линии связи)
2
Yi>100%
Выход N определяет общее число неисправных каналов со значениями Ni=0 и Ni=1.
Модификатор размера МР=00-08, модификатор типа МТ=01-06. Масштаб времени отсутствует.
Входы-выходы алгоритма ВАП
Номер |
Обозначение |
Назначение |
01 |
Х |
Величина допустимого скачка сигнала |
02 |
Т |
Допустимая длительность помехи |
03 |
Хсм1 |
Смещение канала 1 |
04 |
Км1 |
Диапазон канала 1 |
05 |
Хсм2 |
Смещение канала 2 |
06 |
Км2 |
Диапазон канала 2 |
.... |
..... |
...... |
2m+1 |
Хсм,m |
Смещение канала m |
2m+2 |
Км,m |
Диапазон канала m |
|
|
|
01 |
D |
Признак помех в каналах алгоритма |
02 |
N |
Тестовый признак алгоритма |
03 |
Y1 |
1-й выходной сигнал |
04 |
D1 |
Признак помехи 1-го входного cигнала |
05 |
N1 |
Тестовый признак 1-го входного сигнала |
... |
... |
... |
3m |
Ym |
m-й выходной сигнал |
3m+1 |
Dm |
Признак помехи m-го входного сигнала |
3m+2 |
Nm |
Тестовый признак m-го входного сигнала |