

5.6.2. Система частотного регулирования с обратными связями по скорости и эдс статора
Функциональная схема СУЭП приведена на рис. 5.11.
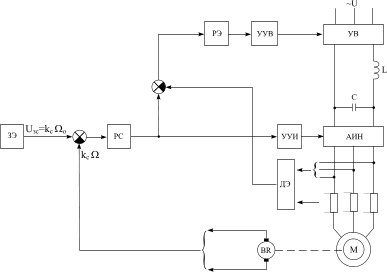
Рис. 5.11. Функциональная схема системы частотного регулирования
С обратными связями по скорости и эдс статора
Отрицательная обратная связь по скорости повышает жесткость механических характеристик привода и как следствие точность поддержания заданной скорости на промежуточных характеристиках.
Обратная связь по ЭДС статора обеспечивает простыми средствами стабилизацию магнитного потока двигателя в широком диапазоне изменения скорости.
Система двухконтурная с подчиненным регулированием. Выходной сигнал регулятора скорости РС поступает на устройство управления инвертором УУИ и одновременно является задающим для регулятора ЭДС РЭ, на второй вход которого поступает сигнал от датчика ЭДС ДЭ. Сигнал, пропорциональный ЭДС статора, получают вычитанием из напряжения на зажимах статора падения напряжения на активных сопротивлениях статорных обмоток. ДЭ включает в себя трансформатор напряжения, выпрямитель, усилитель с гальванической развязкой в канале измерения токов, сумматор и фильтр.
Оптимизация контуров регулирования скорости и ЭДС может быть выполнена, как и в предыдущей системе, по аналогии с двухконтурным СУЭП постоянного тока.
5.6.3. Система частотно-токового управления асинхронным приводом
Функциональная схема СУЭП приведена на рис. 5.12.
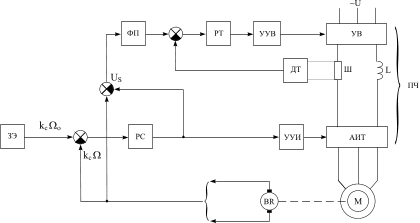
Рис. 5.12. Система частотно-токового управления асинхронным приводом
Электродвигатель М получает питание от преобразователя частоты ПЧ с автономным инвертором тока АИТ. Управляемый выпрямитель УВ с контуром регулирования тока образует при этом источник тока. Управление двигателем производится путем задания тока статора и частоты АИТ.
Система управления двухконтурная. Контур регулирования скорости, включающий регулятор скорости РС, датчик скорости BR (тахогенератор постоянного тока) и устройство управления инвертором УУИ, обеспечивает требуемую жесткость механических характеристик привода.
Внутренний контур регулирования тока обеспечивает стабилизацию тока на входе инвертора, а значит и двигателя М.
Для стабилизации
магнитного потока статора величина
тока двигателя должна изменятся по
определенному закону в зависимости от
скольжения
![]() ,
,
![]() ,
,
где ![]() ‑ ток статора;
‑ ток статора;
![]() ‑ угловая
скорость магнитного поля, создаваемого
статорными обмотками двигателя.
‑ угловая
скорость магнитного поля, создаваемого
статорными обмотками двигателя.
Для реализации
этой зависимости в цепь регулирования
тока введен нелинейный функциональный
преобразователь ФП, на вход которого
поступает разностный сигнал
![]() между выходными сигналами регулятора
скорости РС и датчика скорости BR,
пропорциональный скольжению S.
между выходными сигналами регулятора
скорости РС и датчика скорости BR,
пропорциональный скольжению S.
5.7. Системы векторного управления ад с короткозамкнутым ротором
Современные системы
векторного частотного управления
электроприводами переменного тока
выполняют на основе рассмотренной ранее
математической модели обобщенной
двухфазной электрической машины. Обычно
используют наиболее простую модель с
осями координат
![]() ,
вращающимися в пространстве с постоянной
угловой скоростью
.
,
вращающимися в пространстве с постоянной
угловой скоростью
.
Уравнения (5.1…5.7) в этом случае для АД с короткозамкнутым ротором приводятся к следующему виду:
![]()

В уравнениях (5.8–12) в отличие от (5.1–7) принята другая нумерация (индексация) переменных и параметров: индексами s, r помечены переменные и параметры, относящиеся, соответственно, к статору и ротору двухфазной электрической машины, а индексами – проекции переменных на соответствующие оси.
Через
![]() обозначено число пар полюсов, а через
обозначено число пар полюсов, а через
![]() потокосцепления с обмотками:
потокосцепления с обмотками:
 (5.13)
(5.13)
где ![]() – собственные индуктивности обмоток
статора и ротора;
– собственные индуктивности обмоток
статора и ротора;
![]() – взаимная
индуктивность между обмотками статора
и ротора.
– взаимная
индуктивность между обмотками статора
и ротора.
В уравнениях (5.13) учтено, что взаимные индуктивности между двумя обмотками статора равны нулю, т.к. оси обмоток взаимно перпендикулярны, и поэтому магнитная связь между ними отсутствует.
То же самое справедливо для двух обмоток ротора.
В уравнениях
(5.8–13) проекции переменных на координатные
оси можно рассматривать, как проекции
некоторых векторов, вращающихся в
пространстве. При выборе скорости
вращения осей координат
![]() ,
равной скорости вращения вектора,
представляющего в модели определенную
переменную, проекции этого вектора на
оси координат будут постоянными
величинами. В результате существенно
упрощается математическая модель АД.
,
равной скорости вращения вектора,
представляющего в модели определенную
переменную, проекции этого вектора на
оси координат будут постоянными
величинами. В результате существенно
упрощается математическая модель АД.
Но при синтезе СУЭП с частотным регулированием важно упростить не только модель управляемого объекта, но и устройство управления. Для этого дополнительно ориентируют вращающуюся систему координат так, чтобы направление одной из осей, например u, совпадало по направлению с вектором выбранной переменной.
В этом случае проекция вектора на эту ось будет равна постоянной величине, равной амплитудному значению переменной, а проекция на вторую ортогональную ось будет равна нулю.
Возможны различные
варианты такого совмещения, например,
с векторами
![]() и др.
и др.
СУЭП, использующие такой подход, называют системами векторного управления. В общих чертах они реализуются следующим образом:
измеряются фактические мгновенные значения некоторых переменных (токов, напряжений, потокосцеплений) реальной асинхронной машины;
с помощью специализированных вычислительных устройств они пересчитываются к соответствующим переменным обобщенной двухфазной машины с выбранной системой координат. Преобразованные переменные оказываются при этом сигналами постоянного тока;
текущие значения преобразованных переменных в устройстве управления сравниваются с заданными значениями;
по результатам сравнения соответствующими регуляторами вырабатываются расчетные управляющие воздействия в виде электрических сигналов постоянного тока;
полученные воздействия с помощью специализированных вычислительных устройств преобразуются в управляющие воздействия на реальный трехфазный преобразователь частоты. При этом узлы СУЭП, реализующие функции 3 и 4, выполняются точно так же, как и в системах управления электроприводов постоянного тока.
Сравнительными
исследованиями показано, что применительно
к частотному управлению АД с короткозамкнутым
ротором предпочтительными являются
системы векторного управления с
ориентацией координат по направлению
векторов результирующего потокосцепления
статора
![]() или ротора
или ротора
![]() .
.
Рассмотрим в качестве примера систему с ориентацией осей координат по направлению вектора потокосцепления ротора.
Обозначим модуль
вектора потокосцепления ротора через
![]() .
Тогда при выбранной ориентации осей
.
Тогда при выбранной ориентации осей
![]() :
:
![]()
![]() а производные по времени
а производные по времени
![]()
![]() как от постоянных величин.
как от постоянных величин.
При этом из уравнения
(5.10) получаем
![]() ,
а уравнение (5.12) и два последних уравнения
системы (5.13) преобразуются к следующему
виду:
,
а уравнение (5.12) и два последних уравнения
системы (5.13) преобразуются к следующему
виду:
Разрешим уравнение
(5.16) относительно
![]() и подставим в (5.14):
и подставим в (5.14):
![]()
![]()
![]()
Из уравнений
(5.15), (5.17) следует, что основные взаимосвязи
между параметрами и переменными АД
аналогичны таковым для двигателя
постоянного тока (ДПТ): магнитный поток
пропорционален намагничивающему току
![]() ,
который является аналогом тока возбуждения
ДПТ, а момент пропорционален произведению
магнитного потока и активного тока
,
который является аналогом тока возбуждения
ДПТ, а момент пропорционален произведению
магнитного потока и активного тока
![]() ,
который можно рассматривать как аналог
тока якоря ДПТ.
,
который можно рассматривать как аналог
тока якоря ДПТ.
Из этих же уравнений следует, что если при управлении АД оперировать в цепях управления не с реальными переменными машины, а с преобразованными к координатным осям, ориентированным по полю, можно раздельно управлять величинами магнитного потока и момента двигателя, имея дело не с переменными синусоидальными величинами, а с постоянными их преобразованными значениями. Это позволяет строить систему управления АД аналогично рассмотренным ранее системам для ДПТ.
Основой построения такой системы является информация о величине и пространственном положении вектора потокосцепления в воздушном зазоре машины, измерение которого обычно производится с помощью датчиков Холла.
С учетом изложенного на рис. 5.13 приведена упрощенная функциональная схема одной из систем прямого векторного управления с ориентацией осей координат по направлению вектора потокосцепления ротора (Трансвектор), разработанную фирмой “Сименс”.
Потокосцепление
ротора
![]() измеряется в ней двумя датчиками Холла,
расположенными в воздушном зазоре по
осям фаз
измеряется в ней двумя датчиками Холла,
расположенными в воздушном зазоре по
осям фаз
![]() .
По напряжениям
.
По напряжениям
![]() ,
вырабатываемым датчиками, преобразователь
П1 вычисляет модуль потокосцепления
,
вырабатываемым датчиками, преобразователь
П1 вычисляет модуль потокосцепления
![]() и его мгновенное угловое положение
(угол
)
относительно неподвижной системы
координат
и его мгновенное угловое положение
(угол
)
относительно неподвижной системы
координат
![]() ,
связанной с осями обмоток статора
эквивалентной двухфазной электрической
машины.
,
связанной с осями обмоток статора
эквивалентной двухфазной электрической
машины.
Реальные токи двух
фаз статора измеряются датчиками тока
ДТ и преобразуются преобразователем
П2 в напряжения
![]() ,
пропорциональные намагничивающему
,
пропорциональные намагничивающему
![]() и активному
токам рассмотренной выше модели
двухфазной электрической машины.
и активному
токам рассмотренной выше модели
двухфазной электрической машины.
Мгновенная скорость ротора измеряется датчиком скорости BR (тахогенератором постоянного тока).
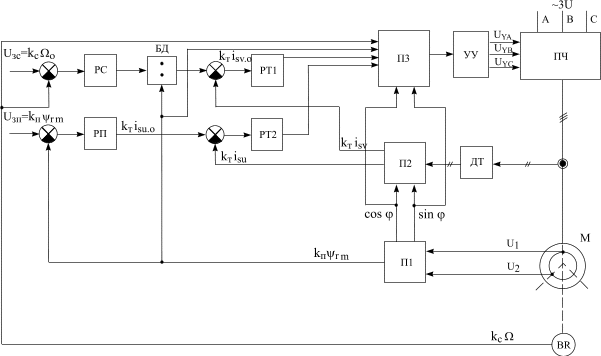
Рис. 5.13. Упрощенная функциональная схема системы “Трансвектор”
В системе использованы ПИ-регуляторы скорости, магнитного потока и токов , .
На вход регулятора
скорости РС поступает сигнал,
пропорциональный отклонению фактической
скорости
от заданной
![]() .
Выходной сигнал РС, пропорциональный
заданному значению момента, после
деления блоком деления БД на напряжение
.
Выходной сигнал РС, пропорциональный
заданному значению момента, после
деления блоком деления БД на напряжение
![]() ,
пропорциональное заданному магнитному
потоку, формирует задающее воздействие
для контура подчиненного регулирования
тока
(регулятор тока РТ1).
,
пропорциональное заданному магнитному
потоку, формирует задающее воздействие
для контура подчиненного регулирования
тока
(регулятор тока РТ1).
На вход регулятора
потока РП поступает сигнал, пропорциональный
отклонению фактического значения модуля
потокосцепления
![]() от заданного значения
от заданного значения
![]() ,
а выходной сигнал РП в соответствии с
уравнением (5.15) является задающим для
подчиненного контура регулирования
тока
,
а выходной сигнал РП в соответствии с
уравнением (5.15) является задающим для
подчиненного контура регулирования
тока
![]() (регулятор тока РТ2).
(регулятор тока РТ2).
Выходные сигналы регуляторов РТ1, РТ2, датчика скорости BR и преобразователя П1 поступают на преобразователь П3, в котором рассчитываются реальные управляющие воздействия, поступающие через устройство управления УУ на преобразователь частоты ПЧ в цепи статора АД.
Преобразователи П1…П3, входящие в состав системы, выполняются с применением специализированных вычислительных устройств.
Оптимизация регуляторов осуществляется по методике, разработанной для СУЭП постоянного тока с подчиненным регулированием.
Рассмотренная система обеспечивает получение характеристик, качественно не отличающихся от характеристик электроприводов постоянного тока, но требует для своей реализации встраивания в двигатель специальных датчиков для измерения модуля и текущего пространственного положения вектора потокосцепления ротора.